
Homework Answers
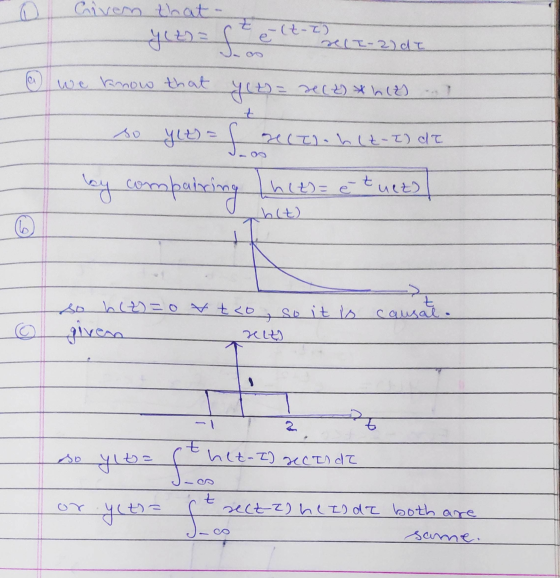
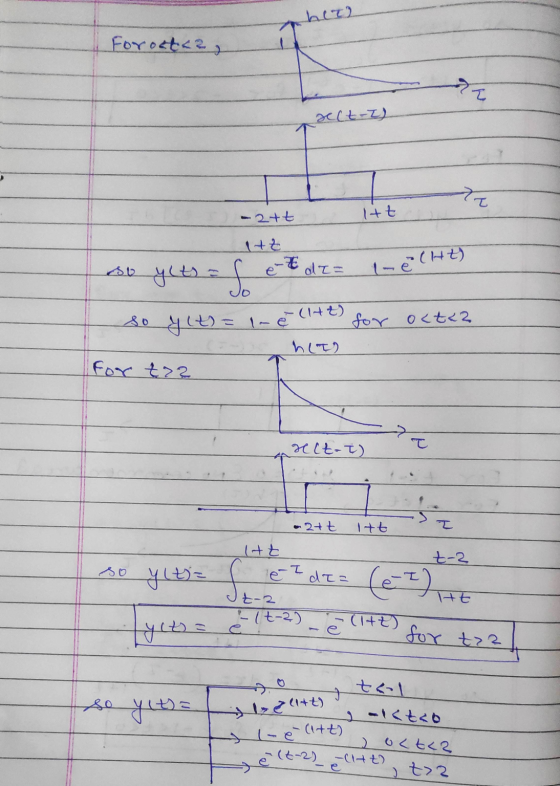
![So ylt= hca)- [-1(2-2)] d I J- co hit rec-I) - 2 For teol For aletco =o E No common area- rhet) s nct-t) -att 1+t + t so ylt](http://img.homeworklib.com/questions/96fec9b0-9fcc-11ea-9c0b-d737f35f92d3.png?x-oss-process=image/resize,w_560)


Add Answer to:
Problem 1 Let's consider an LTI system with intput and output relatex through the equation y(t)...
Problem 1. The input x(t) and output y(t) of an LTI system satisfy the differential equation...
 Problem 1. The input x(t) and output y(t) of an LTI system satisfy the differential equation d’y(t) + wốy(t)=r(t), where wo is a fixed real number. A) Find the right-going impulse response of the system. B) Find the left-going impulse response of the system.
Problem 1. The input x(t) and output y(t) of an LTI system satisfy the differential equation d’y(t) + wốy(t)=r(t), where wo is a fixed real number. A) Find the right-going impulse response of the system. B) Find the left-going impulse response of the system.
Problem 4. Use the convolution integral to find the response y(t) of the LTI system with...
 Problem 4. Use the convolution integral to find the response y(t) of the LTI system with impulse response h(t) to input x(t) a) x(I)-2expl_2t)u(t) , h(1)-expl-t)u(t)
Problem 4. Use the convolution integral to find the response y(t) of the LTI system with impulse response h(t) to input x(t) a) x(I)-2expl_2t)u(t) , h(1)-expl-t)u(t)
Consider a continuous-time LTI system S with impulse response h(t) = 2(u(t + 1)-u(t 1)). Determine...
 Consider a continuous-time LTI system S with impulse response h(t) = 2(u(t + 1)-u(t 1)). Determine the values of the amplitude scaling and the tme shifting that takes place when each of the following input signals is provided to the system S. Don't use the convolution integral, instead use the result about how LTI systems respond to complex exponential signals. (a) x(t) 2 (b) x(t) ej0.5Tt (c) x(t) = e-j0.5πt (d) x(t) = e-jmt (e) x(t) = cos (0.5t) (f)...
Consider a continuous-time LTI system S with impulse response h(t) = 2(u(t + 1)-u(t 1)). Determine the values of the amplitude scaling and the tme shifting that takes place when each of the following input signals is provided to the system S. Don't use the convolution integral, instead use the result about how LTI systems respond to complex exponential signals. (a) x(t) 2 (b) x(t) ej0.5Tt (c) x(t) = e-j0.5πt (d) x(t) = e-jmt (e) x(t) = cos (0.5t) (f)...
Consider a causal LTI system whose input xn] and output y[n] are related by the differenoe equati...
 Consider a causal LTI system whose input xn] and output y[n] are related by the differenoe equation yn In--n] a. Find the impulse response of the system (without using any transform). (5 marks) b. Using convolution determine yin, 1f XIn = 1 un.(6 marks
Consider a causal LTI system whose input xn] and output y[n] are related by the differenoe equation yn In--n] a. Find the impulse response of the system (without using any transform). (5 marks) b. Using convolution...
Consider a causal LTI system whose input xn] and output y[n] are related by the differenoe equation yn In--n] a. Find the impulse response of the system (without using any transform). (5 marks) b. Using convolution determine yin, 1f XIn = 1 un.(6 marks
Consider a causal LTI system whose input xn] and output y[n] are related by the differenoe equation yn In--n] a. Find the impulse response of the system (without using any transform). (5 marks) b. Using convolution...
2.6.1 Consider a causal continuous-time LTI system described by the differential equation u"(t) +...
 2.6.1-2.6.62.6.1 Consider a causal contimuous-time LTI system described by the differential equation$$ y^{\prime \prime}(t)+y(t)=x(t) $$(a) Find the transfer function \(H(s)\), its \(R O C\), and its poles.(b) Find the impulse response \(h(t)\).(c) Classify the system as stable/unstable.(d) Find the step response of the system.2.6.2 Given the impulse response of a continuous-time LTI system, find the transfer function \(H(s),\) the \(\mathrm{ROC}\) of \(H(s)\), and the poles of the system. Also find the differential equation describing each system.(a) \(h(t)=\sin (3 t) u(t)\)(b)...
2.6.1-2.6.62.6.1 Consider a causal contimuous-time LTI system described by the differential equation$$ y^{\prime \prime}(t)+y(t)=x(t) $$(a) Find the transfer function \(H(s)\), its \(R O C\), and its poles.(b) Find the impulse response \(h(t)\).(c) Classify the system as stable/unstable.(d) Find the step response of the system.2.6.2 Given the impulse response of a continuous-time LTI system, find the transfer function \(H(s),\) the \(\mathrm{ROC}\) of \(H(s)\), and the poles of the system. Also find the differential equation describing each system.(a) \(h(t)=\sin (3 t) u(t)\)(b)...
Problem #2 Consider a continuous-time LTI system given by: dy[ + 2y(t) = x(t). Using the...
 Problem #2 Consider a continuous-time LTI system given by: dy[ + 2y(t) = x(t). Using the Fourier transform, find the output y(t) to each of the following input signals: (a) x(t) = e-'u(t), and (b) x(t) = u(t).
Problem #2 Consider a continuous-time LTI system given by: dy[ + 2y(t) = x(t). Using the Fourier transform, find the output y(t) to each of the following input signals: (a) x(t) = e-'u(t), and (b) x(t) = u(t).
CONVOLUTION - Questions 4 and 5 4. Consider an LTI system with an impulse response h(n)...
 CONVOLUTION - Questions 4 and 5 4. Consider an LTI system with an impulse response h(n) = [1 2 1] for 0 <n<2. If the input to the system is x(n) = u(n)-un-2) where u(n) is the unit-step, calculate the output of the system y(n) analytically. Check your answer using the "conv" function in MATLAB. 5. Consider an LTI system with an impulse response h(n) = u(n) where u(n) is the unit-step. (a) If the input to the system is...
CONVOLUTION - Questions 4 and 5 4. Consider an LTI system with an impulse response h(n) = [1 2 1] for 0 <n<2. If the input to the system is x(n) = u(n)-un-2) where u(n) is the unit-step, calculate the output of the system y(n) analytically. Check your answer using the "conv" function in MATLAB. 5. Consider an LTI system with an impulse response h(n) = u(n) where u(n) is the unit-step. (a) If the input to the system is...
1. Evaluate and sketch the convolution integral (the output y(t)) for a system with input x(t)...
 1. Evaluate and sketch the convolution integral (the output y(t)) for a system with input x(t) and impulse response h(t), where x(t) = u(1-2) and h(t)= "u(t) u(t) is the unit step function. Please show clearly all the necessary steps of convolution. Determine the values of the output y(t) at 1 = 0,1 = 3,1 = 00. (3 pts)
1. Evaluate and sketch the convolution integral (the output y(t)) for a system with input x(t) and impulse response h(t), where x(t) = u(1-2) and h(t)= "u(t) u(t) is the unit step function. Please show clearly all the necessary steps of convolution. Determine the values of the output y(t) at 1 = 0,1 = 3,1 = 00. (3 pts)
Mouzey bighalsledsystems tionne 907 octet Acone s ona 27/0 y the 13. The input-output relationship of an LTI system...
 Mouzey bighalsledsystems tionne 907 octet Acone s ona 27/0 y the 13. The input-output relationship of an LTI system is deseribed by the difference squation: n]+0.5y[n-1]-xn], Try to figure out two possible unit impulse responses for such a system. Then state which unit impulse response comresponding to tomer les modules com a stable system. 2, b) x,(2)=z" +62 452 | > 1 14) Find the inverse z-transform of the following signals a) X(E)(-2 XI-2) :-5 c) X2(E)-0.5:)1-0.5 )0. <2 15....
Mouzey bighalsledsystems tionne 907 octet Acone s ona 27/0 y the 13. The input-output relationship of an LTI system is deseribed by the difference squation: n]+0.5y[n-1]-xn], Try to figure out two possible unit impulse responses for such a system. Then state which unit impulse response comresponding to tomer les modules com a stable system. 2, b) x,(2)=z" +62 452 | > 1 14) Find the inverse z-transform of the following signals a) X(E)(-2 XI-2) :-5 c) X2(E)-0.5:)1-0.5 )0. <2 15....
4. (5 pts) Consider a discrete-time LTI system T that generates an output y[n] according to...
 4. (5 pts) Consider a discrete-time LTI system T that generates an output y[n] according to a2 y[n] bx[n] – ay[n – 1] - *[n – 2] where a, b are non-negative real constants. (a) (2 pts) Find the poles of the z-transform of the impulse response h[n] of T. (b) (3 pts) Let H(ejl be the frequency response of T. Find a, b so that the system is causal and stable, |H(1)| = |H(ejº)] = 0.04, and |H(-1)] =...
4. (5 pts) Consider a discrete-time LTI system T that generates an output y[n] according to a2 y[n] bx[n] – ay[n – 1] - *[n – 2] where a, b are non-negative real constants. (a) (2 pts) Find the poles of the z-transform of the impulse response h[n] of T. (b) (3 pts) Let H(ejl be the frequency response of T. Find a, b so that the system is causal and stable, |H(1)| = |H(ejº)] = 0.04, and |H(-1)] =...
 Problem 1. The input x(t) and output y(t) of an LTI system satisfy the differential equation d’y(t) + wốy(t)=r(t), where wo is a fixed real number. A) Find the right-going impulse response of the system. B) Find the left-going impulse response of the system.
Problem 1. The input x(t) and output y(t) of an LTI system satisfy the differential equation d’y(t) + wốy(t)=r(t), where wo is a fixed real number. A) Find the right-going impulse response of the system. B) Find the left-going impulse response of the system.
 Problem 4. Use the convolution integral to find the response y(t) of the LTI system with impulse response h(t) to input x(t) a) x(I)-2expl_2t)u(t) , h(1)-expl-t)u(t)
Problem 4. Use the convolution integral to find the response y(t) of the LTI system with impulse response h(t) to input x(t) a) x(I)-2expl_2t)u(t) , h(1)-expl-t)u(t)
 Consider a continuous-time LTI system S with impulse response h(t) = 2(u(t + 1)-u(t 1)). Determine the values of the amplitude scaling and the tme shifting that takes place when each of the following input signals is provided to the system S. Don't use the convolution integral, instead use the result about how LTI systems respond to complex exponential signals. (a) x(t) 2 (b) x(t) ej0.5Tt (c) x(t) = e-j0.5πt (d) x(t) = e-jmt (e) x(t) = cos (0.5t) (f)...
Consider a continuous-time LTI system S with impulse response h(t) = 2(u(t + 1)-u(t 1)). Determine the values of the amplitude scaling and the tme shifting that takes place when each of the following input signals is provided to the system S. Don't use the convolution integral, instead use the result about how LTI systems respond to complex exponential signals. (a) x(t) 2 (b) x(t) ej0.5Tt (c) x(t) = e-j0.5πt (d) x(t) = e-jmt (e) x(t) = cos (0.5t) (f)...
 Consider a causal LTI system whose input xn] and output y[n] are related by the differenoe equation yn In--n] a. Find the impulse response of the system (without using any transform). (5 marks) b. Using convolution determine yin, 1f XIn = 1 un.(6 marks
Consider a causal LTI system whose input xn] and output y[n] are related by the differenoe equation yn In--n] a. Find the impulse response of the system (without using any transform). (5 marks) b. Using convolution...
Consider a causal LTI system whose input xn] and output y[n] are related by the differenoe equation yn In--n] a. Find the impulse response of the system (without using any transform). (5 marks) b. Using convolution determine yin, 1f XIn = 1 un.(6 marks
Consider a causal LTI system whose input xn] and output y[n] are related by the differenoe equation yn In--n] a. Find the impulse response of the system (without using any transform). (5 marks) b. Using convolution...
 2.6.1-2.6.62.6.1 Consider a causal contimuous-time LTI system described by the differential equation$$ y^{\prime \prime}(t)+y(t)=x(t) $$(a) Find the transfer function \(H(s)\), its \(R O C\), and its poles.(b) Find the impulse response \(h(t)\).(c) Classify the system as stable/unstable.(d) Find the step response of the system.2.6.2 Given the impulse response of a continuous-time LTI system, find the transfer function \(H(s),\) the \(\mathrm{ROC}\) of \(H(s)\), and the poles of the system. Also find the differential equation describing each system.(a) \(h(t)=\sin (3 t) u(t)\)(b)...
2.6.1-2.6.62.6.1 Consider a causal contimuous-time LTI system described by the differential equation$$ y^{\prime \prime}(t)+y(t)=x(t) $$(a) Find the transfer function \(H(s)\), its \(R O C\), and its poles.(b) Find the impulse response \(h(t)\).(c) Classify the system as stable/unstable.(d) Find the step response of the system.2.6.2 Given the impulse response of a continuous-time LTI system, find the transfer function \(H(s),\) the \(\mathrm{ROC}\) of \(H(s)\), and the poles of the system. Also find the differential equation describing each system.(a) \(h(t)=\sin (3 t) u(t)\)(b)...
 Problem #2 Consider a continuous-time LTI system given by: dy[ + 2y(t) = x(t). Using the Fourier transform, find the output y(t) to each of the following input signals: (a) x(t) = e-'u(t), and (b) x(t) = u(t).
Problem #2 Consider a continuous-time LTI system given by: dy[ + 2y(t) = x(t). Using the Fourier transform, find the output y(t) to each of the following input signals: (a) x(t) = e-'u(t), and (b) x(t) = u(t).
 CONVOLUTION - Questions 4 and 5 4. Consider an LTI system with an impulse response h(n) = [1 2 1] for 0 <n<2. If the input to the system is x(n) = u(n)-un-2) where u(n) is the unit-step, calculate the output of the system y(n) analytically. Check your answer using the "conv" function in MATLAB. 5. Consider an LTI system with an impulse response h(n) = u(n) where u(n) is the unit-step. (a) If the input to the system is...
CONVOLUTION - Questions 4 and 5 4. Consider an LTI system with an impulse response h(n) = [1 2 1] for 0 <n<2. If the input to the system is x(n) = u(n)-un-2) where u(n) is the unit-step, calculate the output of the system y(n) analytically. Check your answer using the "conv" function in MATLAB. 5. Consider an LTI system with an impulse response h(n) = u(n) where u(n) is the unit-step. (a) If the input to the system is...
 1. Evaluate and sketch the convolution integral (the output y(t)) for a system with input x(t) and impulse response h(t), where x(t) = u(1-2) and h(t)= "u(t) u(t) is the unit step function. Please show clearly all the necessary steps of convolution. Determine the values of the output y(t) at 1 = 0,1 = 3,1 = 00. (3 pts)
1. Evaluate and sketch the convolution integral (the output y(t)) for a system with input x(t) and impulse response h(t), where x(t) = u(1-2) and h(t)= "u(t) u(t) is the unit step function. Please show clearly all the necessary steps of convolution. Determine the values of the output y(t) at 1 = 0,1 = 3,1 = 00. (3 pts)
 Mouzey bighalsledsystems tionne 907 octet Acone s ona 27/0 y the 13. The input-output relationship of an LTI system is deseribed by the difference squation: n]+0.5y[n-1]-xn], Try to figure out two possible unit impulse responses for such a system. Then state which unit impulse response comresponding to tomer les modules com a stable system. 2, b) x,(2)=z" +62 452 | > 1 14) Find the inverse z-transform of the following signals a) X(E)(-2 XI-2) :-5 c) X2(E)-0.5:)1-0.5 )0. <2 15....
Mouzey bighalsledsystems tionne 907 octet Acone s ona 27/0 y the 13. The input-output relationship of an LTI system is deseribed by the difference squation: n]+0.5y[n-1]-xn], Try to figure out two possible unit impulse responses for such a system. Then state which unit impulse response comresponding to tomer les modules com a stable system. 2, b) x,(2)=z" +62 452 | > 1 14) Find the inverse z-transform of the following signals a) X(E)(-2 XI-2) :-5 c) X2(E)-0.5:)1-0.5 )0. <2 15....
 4. (5 pts) Consider a discrete-time LTI system T that generates an output y[n] according to a2 y[n] bx[n] – ay[n – 1] - *[n – 2] where a, b are non-negative real constants. (a) (2 pts) Find the poles of the z-transform of the impulse response h[n] of T. (b) (3 pts) Let H(ejl be the frequency response of T. Find a, b so that the system is causal and stable, |H(1)| = |H(ejº)] = 0.04, and |H(-1)] =...
4. (5 pts) Consider a discrete-time LTI system T that generates an output y[n] according to a2 y[n] bx[n] – ay[n – 1] - *[n – 2] where a, b are non-negative real constants. (a) (2 pts) Find the poles of the z-transform of the impulse response h[n] of T. (b) (3 pts) Let H(ejl be the frequency response of T. Find a, b so that the system is causal and stable, |H(1)| = |H(ejº)] = 0.04, and |H(-1)] =...
Most questions answered within 3 hours.
-
4. Without doing any calculations, predict whether the observed
∆T would increase, decrease or remain the...
asked 1 hour ago -
Based on the range, which of the following sets of scores has
the greatest variability? 3,...
asked 2 hours ago -
Ripples in a pond travel at a velocity of 3 m/s with one peak
passing a...
asked 2 hours ago -
A man stands on the roof of a building of height 13.0 mm and
throws a...
asked 2 hours ago -
The extent to which assets are financed by borrowed funds and
other liabilities is indicated by:...
asked 3 hours ago -
Explain in detail
Germany is the fifth largest economy
explain what goods and services Germany specializes...
asked 3 hours ago -
The density of platinum is 21.45 g/mL. If a cube of platinum
with a mass of...
asked 3 hours ago -
Accounts Receivable
Sales
A/R Posting
Extended Sales Invoice
Packing Slip
Compare invoice to packing slip 2...
asked 3 hours ago -
Michaella, age 23, is a full-time law student and is claimed by
her parents as a...
asked 3 hours ago -
Why are polymers not typically casted into products?
asked 3 hours ago -
When rolling a die 129 times, what is the probability of rolling
a 6 no more...
asked 4 hours ago -
4. A call option currently sells for $7.75. It has a strike
price of $85 and...
asked 3 hours ago