
Homework Answers

Matlab code:
clc;clear all;close all;
k=1;
z=[0,-10];
p=[-2-i,-2+i];
sys=zpk(z,p,k)
rlocus(sys)
grid on
Output:

Add Answer to:
1. Given a unity feedback system that has the forward transfer function: Ks(s +10) G(s)= 4s...
[7] Sketch the root locus for the unity feedback system whose open loop transfer function is K G(s) Draw the root locus...
 [7] Sketch the root locus for the unity feedback system whose open loop transfer function is K G(s) Draw the root locus of the system with the gain K as a variable s(s+4) (s2+4s+20)' Determine asymptotes, centroid,, breakaway point, angle of departure, and the gain at which root locus crosses jw -axis.
[7] Sketch the root locus for the unity feedback system whose open loop transfer function is K G(s) Draw the root locus of the system with the gain...
[7] Sketch the root locus for the unity feedback system whose open loop transfer function is K G(s) Draw the root locus of the system with the gain K as a variable s(s+4) (s2+4s+20)' Determine asymptotes, centroid,, breakaway point, angle of departure, and the gain at which root locus crosses jw -axis.
[7] Sketch the root locus for the unity feedback system whose open loop transfer function is K G(s) Draw the root locus of the system with the gain...
9. Consider a negative unity-feedback control system with the loop transfer function s +8 D(s) G(8)=K-...
 9. Consider a negative unity-feedback control system with the loop transfer function s +8 D(s) G(8)=K- s+1) ((s + 1)2 + 22 (s + 94 + 793 + 1932 +33s + 20 (a) Determine the asymptotes of the root-locus diagram for K > 0, if any. (06pts) Answer: The real-axis crossing of the asymptote(s), a = The angle(s) of the asymptote(s), 0q = _ (b) Determine the break-away and the break-in points of the root-locus diagram for K > 0,...
9. Consider a negative unity-feedback control system with the loop transfer function s +8 D(s) G(8)=K- s+1) ((s + 1)2 + 22 (s + 94 + 793 + 1932 +33s + 20 (a) Determine the asymptotes of the root-locus diagram for K > 0, if any. (06pts) Answer: The real-axis crossing of the asymptote(s), a = The angle(s) of the asymptote(s), 0q = _ (b) Determine the break-away and the break-in points of the root-locus diagram for K > 0,...
[7] Sketch the root locus for the unity feedback system whose open loop transfer function is K G(s) Draw the root lo...
 [7] Sketch the root locus for the unity feedback system whose open loop transfer function is K G(s) Draw the root locus of the system with the gain Kas a variable. s(s+4) (s2+4s+20) Determine asymptotes, centroid, breakaway point, angle of departure, and the gain at which root locus crosses ja-axis. A control system with type-0 process and a PID controller is shown below. Design the [8 parameters of the PID controller so that the following specifications are satisfied. =100 a)...
[7] Sketch the root locus for the unity feedback system whose open loop transfer function is K G(s) Draw the root locus of the system with the gain Kas a variable. s(s+4) (s2+4s+20) Determine asymptotes, centroid, breakaway point, angle of departure, and the gain at which root locus crosses ja-axis. A control system with type-0 process and a PID controller is shown below. Design the [8 parameters of the PID controller so that the following specifications are satisfied. =100 a)...
Problem (4): Sketch the root locus plot for a system, whose transfer function are given by 10 K (s2 +3 s+7) the complex poles. G(s) (s +3) i) Determine the joo -axis crossing, breakaway point and the...
 Problem (4): Sketch the root locus plot for a system, whose transfer function are given by 10 K (s2 +3 s+7) the complex poles. G(s) (s +3) i) Determine the joo -axis crossing, breakaway point and the angle of departure from (i) Determine the value of the gain for which the closed loop system will have a pole at (-10)
Problem (4): Sketch the root locus plot for a system, whose transfer function are given by 10 K (s2 +3...
Problem (4): Sketch the root locus plot for a system, whose transfer function are given by 10 K (s2 +3 s+7) the complex poles. G(s) (s +3) i) Determine the joo -axis crossing, breakaway point and the angle of departure from (i) Determine the value of the gain for which the closed loop system will have a pole at (-10)
Problem (4): Sketch the root locus plot for a system, whose transfer function are given by 10 K (s2 +3...
7. Consider a unity feedback control system with open-loop transfer function G(s) = k 5 s...
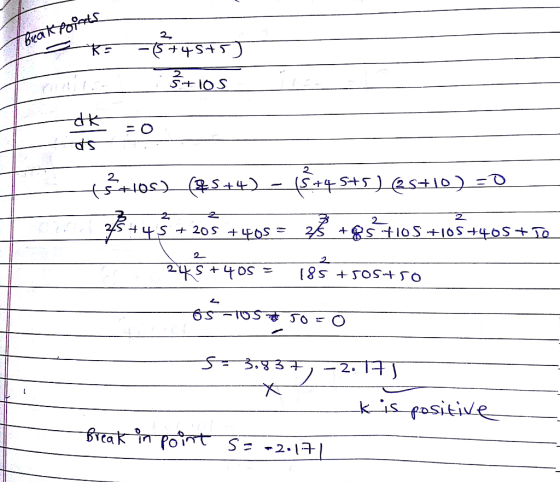
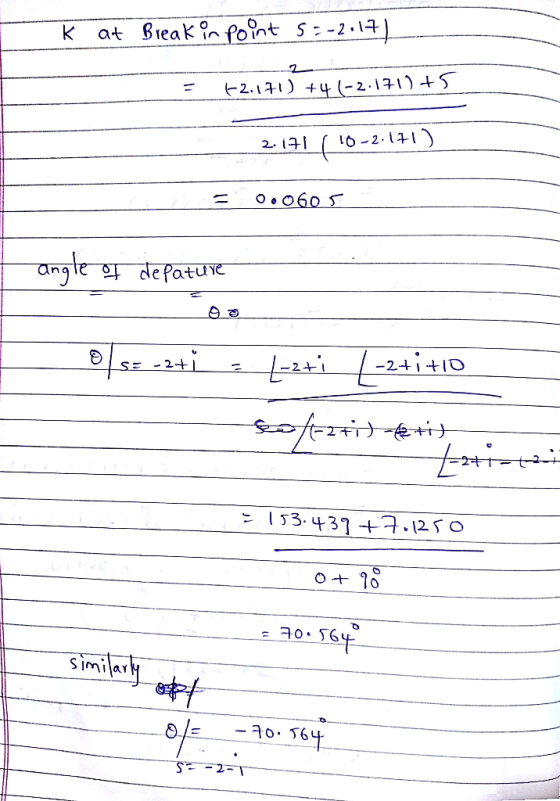
 7. Consider a unity feedback control system with open-loop transfer function G(s) = k 5 s + 2)(52 + 4s + 5) Find the value of gain K > 0 for which the root locus crosses the imaginary axis.
7. Consider a unity feedback control system with open-loop transfer function G(s) = k 5 s + 2)(52 + 4s + 5) Find the value of gain K > 0 for which the root locus crosses the imaginary axis.
Sketch the root-locus plot of a unity feedback system. Determine the asymptotes of the root loci....
 Sketch the root-locus plot of a unity feedback system. Determine the asymptotes of the root loci. Find the points where root loci cross the imaginary axis and the value of at the crossing points. Find the breakaway point. K(s+9) G(s) =- H(S)=1 s(s+2) (s+5)
Sketch the root-locus plot of a unity feedback system. Determine the asymptotes of the root loci. Find the points where root loci cross the imaginary axis and the value of at the crossing points. Find the breakaway point. K(s+9) G(s) =- H(S)=1 s(s+2) (s+5)
The characteristic equation (denominator of the closed-loop transfer function set equal to zero) is given s3 + 2s2 + (20K +7)s+ 100K Sketch the root locus of the given system above with respect to...
 The characteristic equation (denominator of the closed-loop transfer function set equal to zero) is given s3 + 2s2 + (20K +7)s+ 100K Sketch the root locus of the given system above with respect to K. [ Find the asymptotes and their angles, the break-away or break-in points, the angle of arrival or departure for the complex poles and zeros, imaginary axis crossing points, respectively (if any).
The characteristic equation (denominator of the closed-loop transfer function set equal to zero) is...
The characteristic equation (denominator of the closed-loop transfer function set equal to zero) is given s3 + 2s2 + (20K +7)s+ 100K Sketch the root locus of the given system above with respect to K. [ Find the asymptotes and their angles, the break-away or break-in points, the angle of arrival or departure for the complex poles and zeros, imaginary axis crossing points, respectively (if any).
The characteristic equation (denominator of the closed-loop transfer function set equal to zero) is...
1. Given the open-loop transfer function G(s)h(s) find the asymptotes, (b) find the breakaway points, if...
 1. Given the open-loop transfer function G(s)h(s) find the asymptotes, (b) find the breakaway points, if any, (c) find the range of K for stability and also the ju-axis crossing points, and (d) sketch the root locus. (20 points) K/Ks+1)(s+2)(s+3)(s+4)) where 0 s K < 00, (a) K/[s(s+3)(s2+2s+2)] where o s K < o, (a) locate the For the open-loop transfer function G(s)H(s) asymptotes, (b) find the breakaway points, if any, (c) find the jw-axis crossing points and the gain...
1. Given the open-loop transfer function G(s)h(s) find the asymptotes, (b) find the breakaway points, if any, (c) find the range of K for stability and also the ju-axis crossing points, and (d) sketch the root locus. (20 points) K/Ks+1)(s+2)(s+3)(s+4)) where 0 s K < 00, (a) K/[s(s+3)(s2+2s+2)] where o s K < o, (a) locate the For the open-loop transfer function G(s)H(s) asymptotes, (b) find the breakaway points, if any, (c) find the jw-axis crossing points and the gain...
2. Consider the unity feedback negative system with an open-loop function G(S)-KS. a. Plot the locations...
 2. Consider the unity feedback negative system with an open-loop function G(S)-KS. a. Plot the locations of open-loop poles with X and zeros with O on an s-plane. b. Find the number of segments in the root locus diagram based on the number of poles and zeros. c. The breakaway point (the point at which the two real poles meet and diverge to become complex conjugates) occurs when K = 0.02276. Show that the closed-loop system has repeated poles for...
2. Consider the unity feedback negative system with an open-loop function G(S)-KS. a. Plot the locations of open-loop poles with X and zeros with O on an s-plane. b. Find the number of segments in the root locus diagram based on the number of poles and zeros. c. The breakaway point (the point at which the two real poles meet and diverge to become complex conjugates) occurs when K = 0.02276. Show that the closed-loop system has repeated poles for...
Consider the unity feedback system is given below R(S) C(s) G(s) with transfer function: G() =...
 Consider the unity feedback system is given below R(S) C(s) G(s) with transfer function: G() = K(+2) s(s+ 1/s + 3)(+5) a) Sketch the root locus. Clearly indicate any asymptotes. b) Find the value of the gain K, that will make the system marginally stable. c) Find the value of the gain K, for which the closed-loop transfer function will have a pole on the real axis at (-0.5).
Consider the unity feedback system is given below R(S) C(s) G(s) with transfer function: G() = K(+2) s(s+ 1/s + 3)(+5) a) Sketch the root locus. Clearly indicate any asymptotes. b) Find the value of the gain K, that will make the system marginally stable. c) Find the value of the gain K, for which the closed-loop transfer function will have a pole on the real axis at (-0.5).
 [7] Sketch the root locus for the unity feedback system whose open loop transfer function is K G(s) Draw the root locus of the system with the gain K as a variable s(s+4) (s2+4s+20)' Determine asymptotes, centroid,, breakaway point, angle of departure, and the gain at which root locus crosses jw -axis.
[7] Sketch the root locus for the unity feedback system whose open loop transfer function is K G(s) Draw the root locus of the system with the gain...
[7] Sketch the root locus for the unity feedback system whose open loop transfer function is K G(s) Draw the root locus of the system with the gain K as a variable s(s+4) (s2+4s+20)' Determine asymptotes, centroid,, breakaway point, angle of departure, and the gain at which root locus crosses jw -axis.
[7] Sketch the root locus for the unity feedback system whose open loop transfer function is K G(s) Draw the root locus of the system with the gain...
 9. Consider a negative unity-feedback control system with the loop transfer function s +8 D(s) G(8)=K- s+1) ((s + 1)2 + 22 (s + 94 + 793 + 1932 +33s + 20 (a) Determine the asymptotes of the root-locus diagram for K > 0, if any. (06pts) Answer: The real-axis crossing of the asymptote(s), a = The angle(s) of the asymptote(s), 0q = _ (b) Determine the break-away and the break-in points of the root-locus diagram for K > 0,...
9. Consider a negative unity-feedback control system with the loop transfer function s +8 D(s) G(8)=K- s+1) ((s + 1)2 + 22 (s + 94 + 793 + 1932 +33s + 20 (a) Determine the asymptotes of the root-locus diagram for K > 0, if any. (06pts) Answer: The real-axis crossing of the asymptote(s), a = The angle(s) of the asymptote(s), 0q = _ (b) Determine the break-away and the break-in points of the root-locus diagram for K > 0,...
 [7] Sketch the root locus for the unity feedback system whose open loop transfer function is K G(s) Draw the root locus of the system with the gain Kas a variable. s(s+4) (s2+4s+20) Determine asymptotes, centroid, breakaway point, angle of departure, and the gain at which root locus crosses ja-axis. A control system with type-0 process and a PID controller is shown below. Design the [8 parameters of the PID controller so that the following specifications are satisfied. =100 a)...
[7] Sketch the root locus for the unity feedback system whose open loop transfer function is K G(s) Draw the root locus of the system with the gain Kas a variable. s(s+4) (s2+4s+20) Determine asymptotes, centroid, breakaway point, angle of departure, and the gain at which root locus crosses ja-axis. A control system with type-0 process and a PID controller is shown below. Design the [8 parameters of the PID controller so that the following specifications are satisfied. =100 a)...
 Problem (4): Sketch the root locus plot for a system, whose transfer function are given by 10 K (s2 +3 s+7) the complex poles. G(s) (s +3) i) Determine the joo -axis crossing, breakaway point and the angle of departure from (i) Determine the value of the gain for which the closed loop system will have a pole at (-10)
Problem (4): Sketch the root locus plot for a system, whose transfer function are given by 10 K (s2 +3...
Problem (4): Sketch the root locus plot for a system, whose transfer function are given by 10 K (s2 +3 s+7) the complex poles. G(s) (s +3) i) Determine the joo -axis crossing, breakaway point and the angle of departure from (i) Determine the value of the gain for which the closed loop system will have a pole at (-10)
Problem (4): Sketch the root locus plot for a system, whose transfer function are given by 10 K (s2 +3...
 7. Consider a unity feedback control system with open-loop transfer function G(s) = k 5 s + 2)(52 + 4s + 5) Find the value of gain K > 0 for which the root locus crosses the imaginary axis.
7. Consider a unity feedback control system with open-loop transfer function G(s) = k 5 s + 2)(52 + 4s + 5) Find the value of gain K > 0 for which the root locus crosses the imaginary axis.
 Sketch the root-locus plot of a unity feedback system. Determine the asymptotes of the root loci. Find the points where root loci cross the imaginary axis and the value of at the crossing points. Find the breakaway point. K(s+9) G(s) =- H(S)=1 s(s+2) (s+5)
Sketch the root-locus plot of a unity feedback system. Determine the asymptotes of the root loci. Find the points where root loci cross the imaginary axis and the value of at the crossing points. Find the breakaway point. K(s+9) G(s) =- H(S)=1 s(s+2) (s+5)
 The characteristic equation (denominator of the closed-loop transfer function set equal to zero) is given s3 + 2s2 + (20K +7)s+ 100K Sketch the root locus of the given system above with respect to K. [ Find the asymptotes and their angles, the break-away or break-in points, the angle of arrival or departure for the complex poles and zeros, imaginary axis crossing points, respectively (if any).
The characteristic equation (denominator of the closed-loop transfer function set equal to zero) is...
The characteristic equation (denominator of the closed-loop transfer function set equal to zero) is given s3 + 2s2 + (20K +7)s+ 100K Sketch the root locus of the given system above with respect to K. [ Find the asymptotes and their angles, the break-away or break-in points, the angle of arrival or departure for the complex poles and zeros, imaginary axis crossing points, respectively (if any).
The characteristic equation (denominator of the closed-loop transfer function set equal to zero) is...
 1. Given the open-loop transfer function G(s)h(s) find the asymptotes, (b) find the breakaway points, if any, (c) find the range of K for stability and also the ju-axis crossing points, and (d) sketch the root locus. (20 points) K/Ks+1)(s+2)(s+3)(s+4)) where 0 s K < 00, (a) K/[s(s+3)(s2+2s+2)] where o s K < o, (a) locate the For the open-loop transfer function G(s)H(s) asymptotes, (b) find the breakaway points, if any, (c) find the jw-axis crossing points and the gain...
1. Given the open-loop transfer function G(s)h(s) find the asymptotes, (b) find the breakaway points, if any, (c) find the range of K for stability and also the ju-axis crossing points, and (d) sketch the root locus. (20 points) K/Ks+1)(s+2)(s+3)(s+4)) where 0 s K < 00, (a) K/[s(s+3)(s2+2s+2)] where o s K < o, (a) locate the For the open-loop transfer function G(s)H(s) asymptotes, (b) find the breakaway points, if any, (c) find the jw-axis crossing points and the gain...
 2. Consider the unity feedback negative system with an open-loop function G(S)-KS. a. Plot the locations of open-loop poles with X and zeros with O on an s-plane. b. Find the number of segments in the root locus diagram based on the number of poles and zeros. c. The breakaway point (the point at which the two real poles meet and diverge to become complex conjugates) occurs when K = 0.02276. Show that the closed-loop system has repeated poles for...
2. Consider the unity feedback negative system with an open-loop function G(S)-KS. a. Plot the locations of open-loop poles with X and zeros with O on an s-plane. b. Find the number of segments in the root locus diagram based on the number of poles and zeros. c. The breakaway point (the point at which the two real poles meet and diverge to become complex conjugates) occurs when K = 0.02276. Show that the closed-loop system has repeated poles for...
 Consider the unity feedback system is given below R(S) C(s) G(s) with transfer function: G() = K(+2) s(s+ 1/s + 3)(+5) a) Sketch the root locus. Clearly indicate any asymptotes. b) Find the value of the gain K, that will make the system marginally stable. c) Find the value of the gain K, for which the closed-loop transfer function will have a pole on the real axis at (-0.5).
Consider the unity feedback system is given below R(S) C(s) G(s) with transfer function: G() = K(+2) s(s+ 1/s + 3)(+5) a) Sketch the root locus. Clearly indicate any asymptotes. b) Find the value of the gain K, that will make the system marginally stable. c) Find the value of the gain K, for which the closed-loop transfer function will have a pole on the real axis at (-0.5).
Most questions answered within 3 hours.
-
26) Briefly describe, using words or simple diagrams, the
chemiosmotic theory for coupling oxidation to phosphorylation...
asked 1 hour ago -
Suppose that XX is a random variable with mean 16 and standard
deviation 5 . Also...
asked 2 hours ago -
Calculate the number density of argon gas at a temperature of
24C and a pressure of...
asked 5 hours ago -
Alternative
Classification
How to Estimate
Probabilities from Data? ( For continuous Attributes)
And How to generate...
asked 5 hours ago -
An explosion breaks a 20.0-kg object into three parts. The
object is initially moving at a...
asked 6 hours ago -
Calculate the approximate number of residues of Rubisco, which
is involved in carbon fixation in plants,...
asked 7 hours ago -
Other decisions about scientific claims can have a much broader
impact.ENERGYarrow-10x10.png, environment, health, security - all...
asked 8 hours ago -
I need to write a research paper and work cited about this
topic: The United States...
asked 8 hours ago -
Hello! I was wondering if I could have some help?
If the vapor pressure of carvone...
asked 9 hours ago -
An economist wants to estimate the mean per capita income (in
thousands of dollars) for a...
asked 9 hours ago -
What would be the input/output characteristic of a circuit
obtained by putting two of your 2's-complementers...
asked 9 hours ago -
In Drosophila, the transition from the syncytial blastoderm
stage to the cellular blastoderm stage is a...
asked 10 hours ago