
Homework Answers


Add Answer to:
For each system, make an accurate plot of the root locus and find the following: a)...
P. 3: For each system shown below, make an accurate plot of the root locus and find the following...
 P. 3: For each system shown below, make an accurate plot of the root locus and find the following: a. The breakaway and break-in points b. The range of K to keep the system stable. c. The value of K that yields a stable system with critically damped second-order system d. The value of K that yields a stable system with a pair of second-order poles that have a damping ratio of 0.707 e. For system 2, find the departure...
P. 3: For each system shown below, make an accurate plot of the root locus and find the following: a. The breakaway and break-in points b. The range of K to keep the system stable. c. The value of K that yields a stable system with critically damped second-order system d. The value of K that yields a stable system with a pair of second-order poles that have a damping ratio of 0.707 e. For system 2, find the departure...
For the unity feedback system, where G(s) =-s-2)(s-1) make an accurate plot of the root locus...
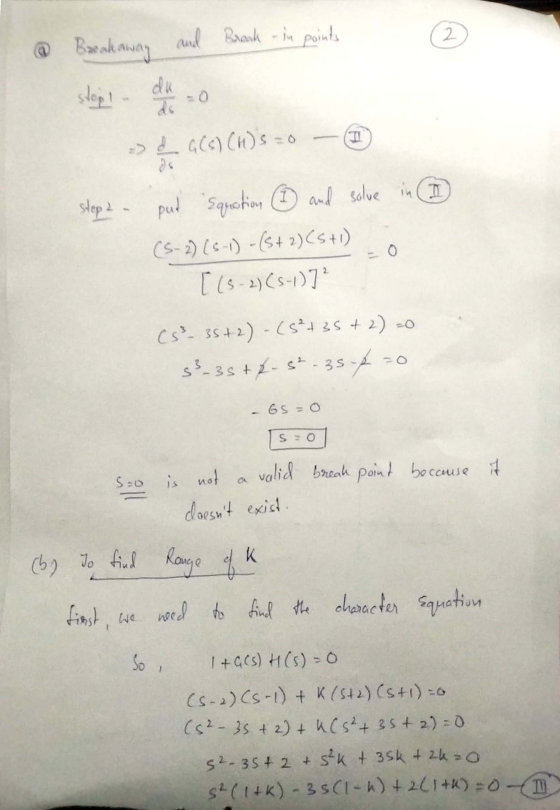
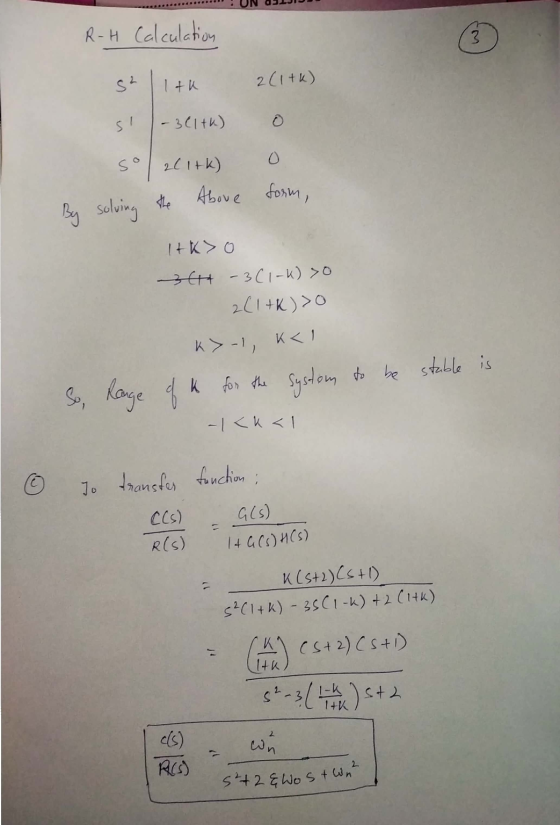
 For the unity feedback system, where G(s) =-s-2)(s-1) make an accurate plot of the root locus and find the following: (a) The breakaway and break-in points (b) The range of K to keep the system stable (c) The value of K that yields a stable system with critically damped second-order poles (d) The value of K that yields a stable system with a pair of second-order poles that have a damping ratio of 0.707
For the unity feedback system, where G(s) =-s-2)(s-1) make an accurate plot of the root locus and find the following: (a) The breakaway and break-in points (b) The range of K to keep the system stable (c) The value of K that yields a stable system with critically damped second-order poles (d) The value of K that yields a stable system with a pair of second-order poles that have a damping ratio of 0.707
Problem 6: For the system shown below, make an accurate plot of the root locus and find the follo...
 Problem 6: For the system shown below, make an accurate plot of the root locus and find the following a. The breakaway and break-in points, b. The range of K to keep the system stable, C. The value of K that yields a stable system with critically damped second-order poles C(s) K(s 2)(s 1) (s - 2)(s-1)
Problem 6: For the system shown below, make an accurate plot of the root locus and find the following a. The breakaway and...
Problem 6: For the system shown below, make an accurate plot of the root locus and find the following a. The breakaway and break-in points, b. The range of K to keep the system stable, C. The value of K that yields a stable system with critically damped second-order poles C(s) K(s 2)(s 1) (s - 2)(s-1)
Problem 6: For the system shown below, make an accurate plot of the root locus and find the following a. The breakaway and...
For the system shown below, find the followings; (a) Make an accurate plot of the root locus (b) The value of K that gives a stable system with critically damped second-order poles (c ) The value...
 For the system shown below, find the followings; (a) Make an accurate plot of the root locus (b) The value of K that gives a stable system with critically damped second-order poles (c ) The value of K that gives a marginally stable sytems Cs) (s-20s- I) 0.5 The characteristic equation (denominator of the closed-loop trans fer function set equal to zero) is given by
For the system shown below, find the followings; (a) Make an accurate plot of the...
For the system shown below, find the followings; (a) Make an accurate plot of the root locus (b) The value of K that gives a stable system with critically damped second-order poles (c ) The value of K that gives a marginally stable sytems Cs) (s-20s- I) 0.5 The characteristic equation (denominator of the closed-loop trans fer function set equal to zero) is given by
For the system shown below, find the followings; (a) Make an accurate plot of the...
1 GH(s) (s24s3s2 + 10s 24) sketch the root locus and find the following: [Section: 8.5...
 1 GH(s) (s24s3s2 + 10s 24) sketch the root locus and find the following: [Section: 8.5 a. The breakaway and break-in points b. The jo-axis crossing c. The range of gain to keep the system stable d. The value of K to yield a stable system with second-order complex poles, with a damping ratio of 0.5
1 GH(s) (s24s3s2 + 10s 24) sketch the root locus and find the following: [Section: 8.5 a. The breakaway and break-in points b. The...
1 GH(s) (s24s3s2 + 10s 24) sketch the root locus and find the following: [Section: 8.5 a. The breakaway and break-in points b. The jo-axis crossing c. The range of gain to keep the system stable d. The value of K to yield a stable system with second-order complex poles, with a damping ratio of 0.5
1 GH(s) (s24s3s2 + 10s 24) sketch the root locus and find the following: [Section: 8.5 a. The breakaway and break-in points b. The...
Question# 1 (25 points) For a unity feedback system with open loop transfer function K(s+10)(s+20) (s+30)(s2-20s+2...
 Question# 1 (25 points) For a unity feedback system with open loop transfer function K(s+10)(s+20) (s+30)(s2-20s+200) G(s) = Do the following using Matlab: a) Sketch the root locus. b) Find the range of gain, K that makes the system stable c) Find the value of K that yields a damping ratio of 0.707 for the system's closed-loop dominant poles. d) Obtain Ts, Tp, %OS for the closed loop system in part c). e) Find the value of K that yields...
Question# 1 (25 points) For a unity feedback system with open loop transfer function K(s+10)(s+20) (s+30)(s2-20s+200) G(s) = Do the following using Matlab: a) Sketch the root locus. b) Find the range of gain, K that makes the system stable c) Find the value of K that yields a damping ratio of 0.707 for the system's closed-loop dominant poles. d) Obtain Ts, Tp, %OS for the closed loop system in part c). e) Find the value of K that yields...
1) The root locus trajectory intervals on the real axis. 2) The number of asymptotes and...
 1) The root locus trajectory intervals on the real axis. 2) The
number of asymptotes and their center. 3) The breakaway/break-in
point of the locus and its open loop gain. 4) The limit gain for
stability and the value of the closed-loop poles. 5) The gain and
the value of the closed loop poles for a damping ratio of .5.
process with negative feedback: R(s) E(s) C(s) H(s) Go(s)= K, Gp(s)- H(s) 1 s(s+1)2 Determine: 1) The root locus trajectory...
1) The root locus trajectory intervals on the real axis. 2) The
number of asymptotes and their center. 3) The breakaway/break-in
point of the locus and its open loop gain. 4) The limit gain for
stability and the value of the closed-loop poles. 5) The gain and
the value of the closed loop poles for a damping ratio of .5.
process with negative feedback: R(s) E(s) C(s) H(s) Go(s)= K, Gp(s)- H(s) 1 s(s+1)2 Determine: 1) The root locus trajectory...
Sketch the root locus plot of a unity feedback system with an open loop transfer function...
Sketch the root locus plot of a unity feedback system with an open loop transfer function G(s) = K / s (s+2) (s+4) Determine the value of K so that the dominant pair of complex poles of the system has a damping ratio of 0.5.
Root Locus: Consider the following system
 Root Locus: Consider the following system (a) What are the poles of the open loop system (locations of the open loop poles)? What are zeros of the open loop system (locations of the zeros)? (b) What is the origin of the asymptotes? (c) What are the angles of asymptotes? (d) Find the break-away and break-in points. (e) Find the angles of departure for all the poles. (f) Draw the root locus plot of G(s). (g) For what values of K is the closed loop system stable?
Root Locus: Consider the following system (a) What are the poles of the open loop system (locations of the open loop poles)? What are zeros of the open loop system (locations of the zeros)? (b) What is the origin of the asymptotes? (c) What are the angles of asymptotes? (d) Find the break-away and break-in points. (e) Find the angles of departure for all the poles. (f) Draw the root locus plot of G(s). (g) For what values of K is the closed loop system stable?
3. Consider the system shown below. For this system. G(s) s(s+1)(s 2) H(s)1 We assume that the value of the gain K is nonnegative. Sketch the root locus plot and determine the K value such that the d...
 3. Consider the system shown below. For this system. G(s) s(s+1)(s 2) H(s)1 We assume that the value of the gain K is nonnegative. Sketch the root locus plot and determine the K value such that the damping ratio of a pair of dominant complex-conjugate closed-loop poles is 0.5. Ri)1 C(s)
3. Consider the system shown below. For this system. G(s) s(s+1)(s 2) H(s)1 We assume that the value of the gain K is nonnegative. Sketch the root locus plot...
3. Consider the system shown below. For this system. G(s) s(s+1)(s 2) H(s)1 We assume that the value of the gain K is nonnegative. Sketch the root locus plot and determine the K value such that the damping ratio of a pair of dominant complex-conjugate closed-loop poles is 0.5. Ri)1 C(s)
3. Consider the system shown below. For this system. G(s) s(s+1)(s 2) H(s)1 We assume that the value of the gain K is nonnegative. Sketch the root locus plot...
 P. 3: For each system shown below, make an accurate plot of the root locus and find the following: a. The breakaway and break-in points b. The range of K to keep the system stable. c. The value of K that yields a stable system with critically damped second-order system d. The value of K that yields a stable system with a pair of second-order poles that have a damping ratio of 0.707 e. For system 2, find the departure...
P. 3: For each system shown below, make an accurate plot of the root locus and find the following: a. The breakaway and break-in points b. The range of K to keep the system stable. c. The value of K that yields a stable system with critically damped second-order system d. The value of K that yields a stable system with a pair of second-order poles that have a damping ratio of 0.707 e. For system 2, find the departure...
 For the unity feedback system, where G(s) =-s-2)(s-1) make an accurate plot of the root locus and find the following: (a) The breakaway and break-in points (b) The range of K to keep the system stable (c) The value of K that yields a stable system with critically damped second-order poles (d) The value of K that yields a stable system with a pair of second-order poles that have a damping ratio of 0.707
For the unity feedback system, where G(s) =-s-2)(s-1) make an accurate plot of the root locus and find the following: (a) The breakaway and break-in points (b) The range of K to keep the system stable (c) The value of K that yields a stable system with critically damped second-order poles (d) The value of K that yields a stable system with a pair of second-order poles that have a damping ratio of 0.707
 Problem 6: For the system shown below, make an accurate plot of the root locus and find the following a. The breakaway and break-in points, b. The range of K to keep the system stable, C. The value of K that yields a stable system with critically damped second-order poles C(s) K(s 2)(s 1) (s - 2)(s-1)
Problem 6: For the system shown below, make an accurate plot of the root locus and find the following a. The breakaway and...
Problem 6: For the system shown below, make an accurate plot of the root locus and find the following a. The breakaway and break-in points, b. The range of K to keep the system stable, C. The value of K that yields a stable system with critically damped second-order poles C(s) K(s 2)(s 1) (s - 2)(s-1)
Problem 6: For the system shown below, make an accurate plot of the root locus and find the following a. The breakaway and...
 For the system shown below, find the followings; (a) Make an accurate plot of the root locus (b) The value of K that gives a stable system with critically damped second-order poles (c ) The value of K that gives a marginally stable sytems Cs) (s-20s- I) 0.5 The characteristic equation (denominator of the closed-loop trans fer function set equal to zero) is given by
For the system shown below, find the followings; (a) Make an accurate plot of the...
For the system shown below, find the followings; (a) Make an accurate plot of the root locus (b) The value of K that gives a stable system with critically damped second-order poles (c ) The value of K that gives a marginally stable sytems Cs) (s-20s- I) 0.5 The characteristic equation (denominator of the closed-loop trans fer function set equal to zero) is given by
For the system shown below, find the followings; (a) Make an accurate plot of the...
 1 GH(s) (s24s3s2 + 10s 24) sketch the root locus and find the following: [Section: 8.5 a. The breakaway and break-in points b. The jo-axis crossing c. The range of gain to keep the system stable d. The value of K to yield a stable system with second-order complex poles, with a damping ratio of 0.5
1 GH(s) (s24s3s2 + 10s 24) sketch the root locus and find the following: [Section: 8.5 a. The breakaway and break-in points b. The...
1 GH(s) (s24s3s2 + 10s 24) sketch the root locus and find the following: [Section: 8.5 a. The breakaway and break-in points b. The jo-axis crossing c. The range of gain to keep the system stable d. The value of K to yield a stable system with second-order complex poles, with a damping ratio of 0.5
1 GH(s) (s24s3s2 + 10s 24) sketch the root locus and find the following: [Section: 8.5 a. The breakaway and break-in points b. The...
 Question# 1 (25 points) For a unity feedback system with open loop transfer function K(s+10)(s+20) (s+30)(s2-20s+200) G(s) = Do the following using Matlab: a) Sketch the root locus. b) Find the range of gain, K that makes the system stable c) Find the value of K that yields a damping ratio of 0.707 for the system's closed-loop dominant poles. d) Obtain Ts, Tp, %OS for the closed loop system in part c). e) Find the value of K that yields...
Question# 1 (25 points) For a unity feedback system with open loop transfer function K(s+10)(s+20) (s+30)(s2-20s+200) G(s) = Do the following using Matlab: a) Sketch the root locus. b) Find the range of gain, K that makes the system stable c) Find the value of K that yields a damping ratio of 0.707 for the system's closed-loop dominant poles. d) Obtain Ts, Tp, %OS for the closed loop system in part c). e) Find the value of K that yields...
 1) The root locus trajectory intervals on the real axis. 2) The
number of asymptotes and their center. 3) The breakaway/break-in
point of the locus and its open loop gain. 4) The limit gain for
stability and the value of the closed-loop poles. 5) The gain and
the value of the closed loop poles for a damping ratio of .5.
process with negative feedback: R(s) E(s) C(s) H(s) Go(s)= K, Gp(s)- H(s) 1 s(s+1)2 Determine: 1) The root locus trajectory...
1) The root locus trajectory intervals on the real axis. 2) The
number of asymptotes and their center. 3) The breakaway/break-in
point of the locus and its open loop gain. 4) The limit gain for
stability and the value of the closed-loop poles. 5) The gain and
the value of the closed loop poles for a damping ratio of .5.
process with negative feedback: R(s) E(s) C(s) H(s) Go(s)= K, Gp(s)- H(s) 1 s(s+1)2 Determine: 1) The root locus trajectory...
 3. Consider the system shown below. For this system. G(s) s(s+1)(s 2) H(s)1 We assume that the value of the gain K is nonnegative. Sketch the root locus plot and determine the K value such that the damping ratio of a pair of dominant complex-conjugate closed-loop poles is 0.5. Ri)1 C(s)
3. Consider the system shown below. For this system. G(s) s(s+1)(s 2) H(s)1 We assume that the value of the gain K is nonnegative. Sketch the root locus plot...
3. Consider the system shown below. For this system. G(s) s(s+1)(s 2) H(s)1 We assume that the value of the gain K is nonnegative. Sketch the root locus plot and determine the K value such that the damping ratio of a pair of dominant complex-conjugate closed-loop poles is 0.5. Ri)1 C(s)
3. Consider the system shown below. For this system. G(s) s(s+1)(s 2) H(s)1 We assume that the value of the gain K is nonnegative. Sketch the root locus plot...
Most questions answered within 3 hours.
-
the following reaction occurs in a balloon containing
N2O2 gas
N2O4(g)=2NO2(g)
will the volume of the...
asked 29 minutes ago -
answer the questions throughout this program
public class Day implements Comparable {
Private Boolean atWork;...
asked 36 minutes ago -
This is C++ code for parking fee management program
#include <iostream>
#include <iomanip>
using namespace std;...
asked 47 minutes ago -
The free energy change for the following reaction at 25 °C, when
[Sn2+] = 1.17 M...
asked 2 hours ago -
An MNE is this kind of industry when competition in one country
is essentially independent of...
asked 4 hours ago -
. For this set of questions, determine what
proportion of a normal distribution is located betweeneach...
asked 4 hours ago -
A college student is employed as a door-to-door newspaper
salesman. Historical data suggests that the student...
asked 5 hours ago -
MATLAB HW 11 problem using Switch Case and Input commands
Write a script file that calculates...
asked 5 hours ago -
Considering gravitational time dilation, calculate the time that
passes in Earth’s surface while 1 hour passes...
asked 5 hours ago -
Minitab Problem: Take the Lake Hume June rainfall data and find
use the processes outlined in...
asked 6 hours ago -
X Company is trying to decide whether to continue using old
equipment to make Product A...
asked 6 hours ago -
IN PYTHON ONLY !! Program 2: Re-work
program #5 (WeeklyHours) from the previous assignment such that...
asked 7 hours ago