![Question 2 (a) Determine whether the discrete time system which has an output y[n] 2*x[n] over the nterval 010 is linear or n](http://img.homeworklib.com/questions/51fb56a0-c8e9-11ea-a3e1-cb4562d2b3f8.png?x-oss-process=image/resize,w_560)
Homework Answers
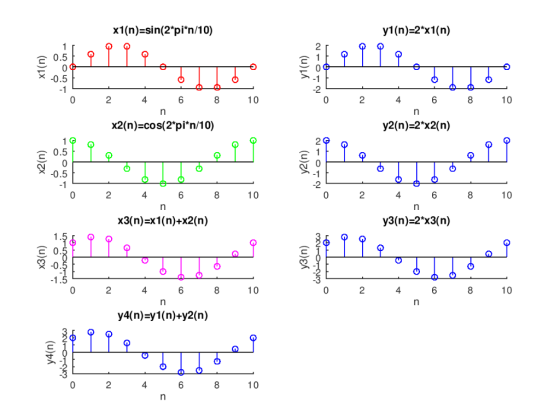
a)MATLAB:
clc;close all;clear all;
n=0:1:10
%y1(n) to input x1(n)=sin(2*pi*n/10)
x1=sin(2*pi*n/10)
y1=2*x1
subplot(421)
stem(n,x1,'r');xlabel('n');ylabel('x1(n)');title('x1(n)=sin(2*pi*n/10)')
subplot(422)
stem(n,y1,'b');xlabel('n');ylabel('y1(n)');title('y1(n)=2*x1(n)')
%y2(n) to input x2(n)=cos(2*pi*n/10)
x2=cos(2*pi*n/10)
y2=2*x2
subplot(423)
stem(n,x2,'g');xlabel('n');ylabel('x2(n)');title('x2(n)=cos(2*pi*n/10)')
subplot(424)
stem(n,y2,'b');xlabel('n');ylabel('y2(n)');title('y2(n)=2*x2(n)')
%y3(n) to input x3(n)=x1(n)+x2(n)
x3=x1.+x2
y3=2*x3
subplot(425)
stem(n,x3,'m');xlabel('n');ylabel('x3(n)');title('x3(n)=x1(n)+x2(n)')
subplot(426)
stem(n,y3,'b');xlabel('n');ylabel('y3(n)');title('y3(n)=2*x3(n)')
%y3(n) to input x3(n)=x1(n)+x2(n)
y4=y1+y2
subplot(427)
stem(n,y4,'b');xlabel('n');ylabel('y4(n)');title('y4(n)=y1(n)+y2(n)')
if(y3==y4)
disp('outputs consistent with a linear system')
else
disp('Not linear')
end
Command window:
y3 =
Columns 1 through 9:
2.00000 2.79360 2.52015 1.28408 -0.44246 -2.00000 -2.79360 -2.52015 -1.28408
Columns 10 and 11:
0.44246 2.00000
y4 =
Columns 1 through 9:
2.00000 2.79360 2.52015 1.28408 -0.44246 -2.00000 -2.79360 -2.52015 -1.28408
Columns 10 and 11:
0.44246 2.00000
outputs consistent with a linear system
____________________________________________________
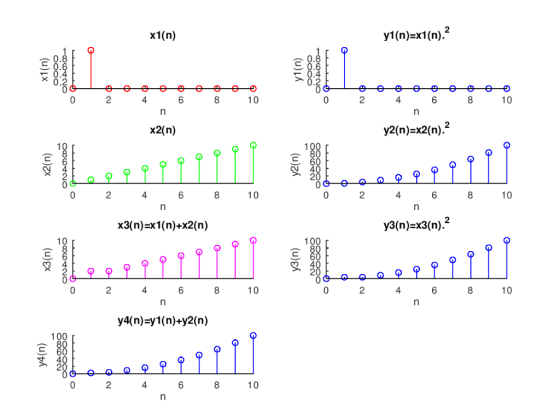
b) i) Linearity for x1=[0,1],x2=n
MATLAB:
clc;close all;clear all;
n=0:1:10
%y1(n) to input x1(n)=[0,1]
x1=[0,1,zeros(1,length(n)-2)]
y1=x1.^2
subplot(421)
stem(n,x1,'r');xlabel('n');ylabel('x1(n)');title('x1(n)')
subplot(422)
stem(n,y1,'b');xlabel('n');ylabel('y1(n)');title('y1(n)=x1(n).^2')
%y2(n) to input x2(n)=n
x2=n
y2=x2.^2
subplot(423)
stem(n,x2,'g');xlabel('n');ylabel('x2(n)');title('x2(n)')
subplot(424)
stem(n,y2,'b');xlabel('n');ylabel('y2(n)');title('y2(n)=x2(n).^2')
%y3(n) to input x3(n)=x1(n)+x2(n)
x3=x1.+x2
y3=x3.^2
subplot(425)
stem(n,x3,'m');xlabel('n');ylabel('x3(n)');title('x3(n)=x1(n)+x2(n)')
subplot(426)
stem(n,y3,'b');xlabel('n');ylabel('y3(n)');title('y3(n)=x3(n).^2')
%y3(n) to input x3(n)=x1(n)+x2(n)
y4=y1+y2
subplot(427)
stem(n,y4,'b');xlabel('n');ylabel('y4(n)');title('y4(n)=y1(n)+y2(n)')
if(y3==y4)
disp('outputs consistent with a linear system')
else
disp('Not linear')
end
Command window:
y3 =
0 4 4 9 16 25 36 49 64 81 100
y4 =
0 2 4 9 16 25 36 49 64 81 100
Not linear
ii)Linearity:
clc;close all;clear all;
n=0:1:10
%y1(n) to input x1(n)=[0,1]
x1=[0,1,zeros(1,length(n)-2)]
y1=x1.^2
subplot(421)
stem(n,x1,'r');xlabel('n');ylabel('x1(n)');title('x1(n)=sin(2*pi*n/10)')
subplot(422)
stem(n,y1,'b');xlabel('n');ylabel('y1(n)');title('y1(n)=x1(n).^2')
%y2(n) to input x2(n)=n
x2=n
y2=x2.^2
subplot(423)
stem(n,x2,'g');xlabel('n');ylabel('x2(n)');title('x2(n)=cos(2*pi*n/10)')
subplot(424)
stem(n,y2,'b');xlabel('n');ylabel('y2(n)');title('y2(n)=x2(n).^2')
%y3(n) to input x3(n)=x1(n)+x2(n)
x3=x1.+x2
y3=x3.^2
subplot(425)
stem(n,x3,'m');xlabel('n');ylabel('x3(n)');title('x3(n)=x1(n)+x2(n)')
subplot(426)
stem(n,y3,'b');xlabel('n');ylabel('y3(n)');title('y3(n)=x3(n).^2')
%y3(n) to input x3(n)=x1(n)+x2(n)
y4=y1+y2
subplot(427)
stem(n,y4,'b');xlabel('n');ylabel('y4(n)');title('y4(n)=y1(n)+y2(n)')
if(y3==y4)
disp('outputs consistent with a linear system')
else
disp('Not linear')
end

Command window:
y3 =
5 4 4 6 8 10 12 14 16 18 20
y4 =
10 4 4 6 8 10 12 14 16 18 20
Not linear
b(i) Time invariant:
clc;close all;clear all;
n=0:1:4
%y1(n) to input x1(n)=[0,1]
x=[0,1,zeros(1,length(n)-2)]
subplot(221)
stem(n,x,'r');xlabel('n');ylabel('x(n)');title('x(n)')
n0=2
%plot y(n-k)
y=x.^2
for k=1:length(n)
y1(k+n0)=y(k)
end
m=0:1:max(n)+n0
subplot(222)
stem(m,y1,'b');xlabel('n');ylabel('y(n-k)');title('y(n-k)')
for k=1:length(n)
x1(k+n0)=x(k)
end
subplot(223)
stem(m,x1,'r');xlabel('n');ylabel('x(n-no)');title('x(n-no)')
y=x1.^2
subplot(224)
stem(m,y,'b');xlabel('n');ylabel('y(n,k)');title('y(n,k)')
if(y1==y)
disp('the system is time invariant')
else
disp('the system is time variant')
end

Command window:
the system is time invariant
>> y
y =
0 0 0 1 0 0 0
>> y1
y1 =
0 0 0 1 0 0 0
ii)time invariant:
clc;close all;clear all;
n=0:1:4
%y1(n) to input x1(n)=[0,1]
x=[0,1,zeros(1,length(n)-2)]
subplot(221)
stem(n,x,'r');xlabel('n');ylabel('x(n)');title('x(n)')
n0=2
%plot y(n-k)
y=(2*x)+(5*(n==0))
for k=1:length(n)
y1(k+n0)=y(k)
end
m=0:1:max(n)+n0
subplot(222)
stem(m,y1,'b');xlabel('n');ylabel('y(n-k)');title('y(n-k)')
for k=1:length(n)
x1(k+n0)=x(k)
end
subplot(223)
stem(m,x1,'r');xlabel('n');ylabel('x(n-no)');title('x(n-no)')
y=(2*x1)+(5*(m==0))
subplot(224)
stem(m,y,'b');xlabel('n');ylabel('y(n,k)');title('y(n,k)')
if(y1==y)
disp('the system is time invariant')
else
disp('the system is time variant')
end

the system is time variant
>> y
y =
5 0 0 2 0 0 0
>> y1
y1 =
0 0 5 2 0 0 0
Add Answer to:
Question 2 (a) Determine whether the discrete time system which has an output y[n] 2*x[n] over...
The impulse response h(t) of a linear time-invariant system is 2*pi[(t-2)/2]. Find and plot the output...
The impulse response h(t) of a linear time-invariant system is 2*pi[(t-2)/2]. Find and plot the output when the system is driven by an input signal that is identical to the impulse response.
Consider the discrete-time system with input x[n] and output y[n] described by : y[n]=x[n]u[2-n] Which of the...
Consider the discrete-time system with input x[n] and output y[n] described by : y[n]=x[n]u[2-n] Which of the following properties does this system possess? Justify your answer in each case. Do not use Laplace transforms a) Memoryless b)Time-invariant c) Linear d)Casual e) Stable
9. Determine whether the following systems are invertible. If so, find the inverse. If not, find...
 9. Determine whether the following systems are invertible. If so, find the inverse. If not, find 2 input signals that produce the same output. (a) y)-r (b) yn]-ewl, where a is a real number (c) yt)-vx(t) for real-valued signals x(t) (d) yIn] xIn] (complex conjugate) 10. In most of the book, we will be discussing ways to analyze linear time-invariant (LTI) systems. As we will explore in much more detail later, the response of an LTI system to a particular...
9. Determine whether the following systems are invertible. If so, find the inverse. If not, find 2 input signals that produce the same output. (a) y)-r (b) yn]-ewl, where a is a real number (c) yt)-vx(t) for real-valued signals x(t) (d) yIn] xIn] (complex conjugate) 10. In most of the book, we will be discussing ways to analyze linear time-invariant (LTI) systems. As we will explore in much more detail later, the response of an LTI system to a particular...
3.5. The response of a linear and time-invariant system to the input signal x[n]= 6[n] is...
 3.5. The response of a linear and time-invariant system to the input signal x[n]= 6[n] is given by Sys {on]}= { 2,1, -1} n=0 Determine the response of the system to the following input signals: n] = 8[n]+6[n - 1 r[n] 6[n]26n - 1][n - 2] [n] un]- un - 5] xn] = а. b. C. 1 (u[n]- u[n - 5]) d.
3.5. The response of a linear and time-invariant system to the input signal x[n]= 6[n] is given by Sys {on]}= { 2,1, -1} n=0 Determine the response of the system to the following input signals: n] = 8[n]+6[n - 1 r[n] 6[n]26n - 1][n - 2] [n] un]- un - 5] xn] = а. b. C. 1 (u[n]- u[n - 5]) d.
1. Consider a discrete-time system H with input x[n] and output y[n]Hn (a) Define the following...
 1. Consider a discrete-time system H with input x[n] and output y[n]Hn (a) Define the following general properties of system H () memoryless;(ii BIBO stable; (ii) time-invariant. (b) Consider the DT system given by the input-output relation Indicate whether or not the above properties are satisfied by this system and justify your answer.
1. Consider a discrete-time system H with input x[n] and output y[n]Hn (a) Define the following general properties of system H () memoryless;(ii BIBO stable; (ii) time-invariant. (b) Consider the DT system given by the input-output relation Indicate whether or not the above properties are satisfied by this system and justify your answer.
Q.5 (a) Show that a linear, time-invariant, discrete-time system is stable in the bounded- input bounded-output...
 Q.5 (a) Show that a linear, time-invariant, discrete-time system is stable in the bounded- input bounded-output sense if, and only if the unit sample response of the system, h[n], is absolutely summable, that is, Alfa]]<00 | [n]| < do ***** (13 marks] (b) Consider a linear, time-invariant discrete-time system with unit sample response, hin), given by hin] = a[n] – đặn – 3 where [n] is the unit sample sequence. (1) Is the system stable in the bounded-input bounded-output sense?...
Q.5 (a) Show that a linear, time-invariant, discrete-time system is stable in the bounded- input bounded-output sense if, and only if the unit sample response of the system, h[n], is absolutely summable, that is, Alfa]]<00 | [n]| < do ***** (13 marks] (b) Consider a linear, time-invariant discrete-time system with unit sample response, hin), given by hin] = a[n] – đặn – 3 where [n] is the unit sample sequence. (1) Is the system stable in the bounded-input bounded-output sense?...
For a continuous time linear time-invariant system, the input-output relation is the following (x(t) the input, y(t) the...
 For a continuous time linear time-invariant system, the
input-output relation is the following (x(t) the input, y(t)
the
output):
, where h(t) is the impulse response function of the
system.
Please explain why a signal like e/“* is always an eigenvector
of
this linear map for any w. Also, if ¥(w),X(w),and H(w) are
the
Fourier transforms of y(t),x(t),and h(t), respectively.
Please
derive in detail the relation between Y(w),X(w),and H(w),
which means to reproduce the proof of the basic convolution
property...
For a continuous time linear time-invariant system, the
input-output relation is the following (x(t) the input, y(t)
the
output):
, where h(t) is the impulse response function of the
system.
Please explain why a signal like e/“* is always an eigenvector
of
this linear map for any w. Also, if ¥(w),X(w),and H(w) are
the
Fourier transforms of y(t),x(t),and h(t), respectively.
Please
derive in detail the relation between Y(w),X(w),and H(w),
which means to reproduce the proof of the basic convolution
property...
2. (a) For each sample of a discrete time signal x[n] as input, a system S...
 2. (a) For each sample of a discrete time signal x[n] as input, a system S outputs the value y[n- . Determine whether the system S is i. linear ii. time-invariant 1ll. causal iv. stable Each of your answers should be supported by justification. In other words, show your reasoning (b) Consider a stable linear time-invariant (LTI) system with transfer function H(z). It is required to design a LTI compensator system G(z) that is in cascade with H(z) such that...
2. (a) For each sample of a discrete time signal x[n] as input, a system S outputs the value y[n- . Determine whether the system S is i. linear ii. time-invariant 1ll. causal iv. stable Each of your answers should be supported by justification. In other words, show your reasoning (b) Consider a stable linear time-invariant (LTI) system with transfer function H(z). It is required to design a LTI compensator system G(z) that is in cascade with H(z) such that...
Realize the system which generates the output y1(n)-1/2 [x(n)+x(-n)] and y2(n)-1/2 [x(n)-x(-n)] using matlab. By generating signals xl(n)-sin(on) and x2(n)-cos(on) for various values of o-[0,/6,...
 Realize the system which generates the output y1(n)-1/2 [x(n)+x(-n)] and y2(n)-1/2 [x(n)-x(-n)] using matlab. By generating signals xl(n)-sin(on) and x2(n)-cos(on) for various values of o-[0,/6, ,3Tt/2, 1.9T/2) obtain 3. a) Output yl(n) and y2(n) b) Critically analyze the system outputs y 1 (n) and y2(n) and find out the type of filter obtained.
Realize the system which generates the output y1(n)-1/2 [x(n)+x(-n)] and y2(n)-1/2 [x(n)-x(-n)] using matlab. By generating signals xl(n)-sin(on) and x2(n)-cos(on) for various values of o-[0,/6, ,3Tt/2, 1.9T/2)...
Realize the system which generates the output y1(n)-1/2 [x(n)+x(-n)] and y2(n)-1/2 [x(n)-x(-n)] using matlab. By generating signals xl(n)-sin(on) and x2(n)-cos(on) for various values of o-[0,/6, ,3Tt/2, 1.9T/2) obtain 3. a) Output yl(n) and y2(n) b) Critically analyze the system outputs y 1 (n) and y2(n) and find out the type of filter obtained.
Realize the system which generates the output y1(n)-1/2 [x(n)+x(-n)] and y2(n)-1/2 [x(n)-x(-n)] using matlab. By generating signals xl(n)-sin(on) and x2(n)-cos(on) for various values of o-[0,/6, ,3Tt/2, 1.9T/2)...
Problem 4. Given the input/output system represented by t-1 y(t) = 2 ( x(y - 3)...
 Problem 4. Given the input/output system represented by t-1 y(t) = 2 ( x(y - 3) dy where x(t) is the input and y(t) is the output, a) Determine whether the system is linear or non-linear. b) Determine the impulse response h(t, to) of the system by setting x(t)= 8(t–to). c) Determine whether the system is time invariant or time variant. d) Determine whether the system is causal or non-causal.
Problem 4. Given the input/output system represented by t-1 y(t) = 2 ( x(y - 3) dy where x(t) is the input and y(t) is the output, a) Determine whether the system is linear or non-linear. b) Determine the impulse response h(t, to) of the system by setting x(t)= 8(t–to). c) Determine whether the system is time invariant or time variant. d) Determine whether the system is causal or non-causal.
 9. Determine whether the following systems are invertible. If so, find the inverse. If not, find 2 input signals that produce the same output. (a) y)-r (b) yn]-ewl, where a is a real number (c) yt)-vx(t) for real-valued signals x(t) (d) yIn] xIn] (complex conjugate) 10. In most of the book, we will be discussing ways to analyze linear time-invariant (LTI) systems. As we will explore in much more detail later, the response of an LTI system to a particular...
9. Determine whether the following systems are invertible. If so, find the inverse. If not, find 2 input signals that produce the same output. (a) y)-r (b) yn]-ewl, where a is a real number (c) yt)-vx(t) for real-valued signals x(t) (d) yIn] xIn] (complex conjugate) 10. In most of the book, we will be discussing ways to analyze linear time-invariant (LTI) systems. As we will explore in much more detail later, the response of an LTI system to a particular...
 3.5. The response of a linear and time-invariant system to the input signal x[n]= 6[n] is given by Sys {on]}= { 2,1, -1} n=0 Determine the response of the system to the following input signals: n] = 8[n]+6[n - 1 r[n] 6[n]26n - 1][n - 2] [n] un]- un - 5] xn] = а. b. C. 1 (u[n]- u[n - 5]) d.
3.5. The response of a linear and time-invariant system to the input signal x[n]= 6[n] is given by Sys {on]}= { 2,1, -1} n=0 Determine the response of the system to the following input signals: n] = 8[n]+6[n - 1 r[n] 6[n]26n - 1][n - 2] [n] un]- un - 5] xn] = а. b. C. 1 (u[n]- u[n - 5]) d.
 1. Consider a discrete-time system H with input x[n] and output y[n]Hn (a) Define the following general properties of system H () memoryless;(ii BIBO stable; (ii) time-invariant. (b) Consider the DT system given by the input-output relation Indicate whether or not the above properties are satisfied by this system and justify your answer.
1. Consider a discrete-time system H with input x[n] and output y[n]Hn (a) Define the following general properties of system H () memoryless;(ii BIBO stable; (ii) time-invariant. (b) Consider the DT system given by the input-output relation Indicate whether or not the above properties are satisfied by this system and justify your answer.
 Q.5 (a) Show that a linear, time-invariant, discrete-time system is stable in the bounded- input bounded-output sense if, and only if the unit sample response of the system, h[n], is absolutely summable, that is, Alfa]]<00 | [n]| < do ***** (13 marks] (b) Consider a linear, time-invariant discrete-time system with unit sample response, hin), given by hin] = a[n] – đặn – 3 where [n] is the unit sample sequence. (1) Is the system stable in the bounded-input bounded-output sense?...
Q.5 (a) Show that a linear, time-invariant, discrete-time system is stable in the bounded- input bounded-output sense if, and only if the unit sample response of the system, h[n], is absolutely summable, that is, Alfa]]<00 | [n]| < do ***** (13 marks] (b) Consider a linear, time-invariant discrete-time system with unit sample response, hin), given by hin] = a[n] – đặn – 3 where [n] is the unit sample sequence. (1) Is the system stable in the bounded-input bounded-output sense?...
 For a continuous time linear time-invariant system, the
input-output relation is the following (x(t) the input, y(t)
the
output):
, where h(t) is the impulse response function of the
system.
Please explain why a signal like e/“* is always an eigenvector
of
this linear map for any w. Also, if ¥(w),X(w),and H(w) are
the
Fourier transforms of y(t),x(t),and h(t), respectively.
Please
derive in detail the relation between Y(w),X(w),and H(w),
which means to reproduce the proof of the basic convolution
property...
For a continuous time linear time-invariant system, the
input-output relation is the following (x(t) the input, y(t)
the
output):
, where h(t) is the impulse response function of the
system.
Please explain why a signal like e/“* is always an eigenvector
of
this linear map for any w. Also, if ¥(w),X(w),and H(w) are
the
Fourier transforms of y(t),x(t),and h(t), respectively.
Please
derive in detail the relation between Y(w),X(w),and H(w),
which means to reproduce the proof of the basic convolution
property...
 2. (a) For each sample of a discrete time signal x[n] as input, a system S outputs the value y[n- . Determine whether the system S is i. linear ii. time-invariant 1ll. causal iv. stable Each of your answers should be supported by justification. In other words, show your reasoning (b) Consider a stable linear time-invariant (LTI) system with transfer function H(z). It is required to design a LTI compensator system G(z) that is in cascade with H(z) such that...
2. (a) For each sample of a discrete time signal x[n] as input, a system S outputs the value y[n- . Determine whether the system S is i. linear ii. time-invariant 1ll. causal iv. stable Each of your answers should be supported by justification. In other words, show your reasoning (b) Consider a stable linear time-invariant (LTI) system with transfer function H(z). It is required to design a LTI compensator system G(z) that is in cascade with H(z) such that...
 Realize the system which generates the output y1(n)-1/2 [x(n)+x(-n)] and y2(n)-1/2 [x(n)-x(-n)] using matlab. By generating signals xl(n)-sin(on) and x2(n)-cos(on) for various values of o-[0,/6, ,3Tt/2, 1.9T/2) obtain 3. a) Output yl(n) and y2(n) b) Critically analyze the system outputs y 1 (n) and y2(n) and find out the type of filter obtained.
Realize the system which generates the output y1(n)-1/2 [x(n)+x(-n)] and y2(n)-1/2 [x(n)-x(-n)] using matlab. By generating signals xl(n)-sin(on) and x2(n)-cos(on) for various values of o-[0,/6, ,3Tt/2, 1.9T/2)...
Realize the system which generates the output y1(n)-1/2 [x(n)+x(-n)] and y2(n)-1/2 [x(n)-x(-n)] using matlab. By generating signals xl(n)-sin(on) and x2(n)-cos(on) for various values of o-[0,/6, ,3Tt/2, 1.9T/2) obtain 3. a) Output yl(n) and y2(n) b) Critically analyze the system outputs y 1 (n) and y2(n) and find out the type of filter obtained.
Realize the system which generates the output y1(n)-1/2 [x(n)+x(-n)] and y2(n)-1/2 [x(n)-x(-n)] using matlab. By generating signals xl(n)-sin(on) and x2(n)-cos(on) for various values of o-[0,/6, ,3Tt/2, 1.9T/2)...
 Problem 4. Given the input/output system represented by t-1 y(t) = 2 ( x(y - 3) dy where x(t) is the input and y(t) is the output, a) Determine whether the system is linear or non-linear. b) Determine the impulse response h(t, to) of the system by setting x(t)= 8(t–to). c) Determine whether the system is time invariant or time variant. d) Determine whether the system is causal or non-causal.
Problem 4. Given the input/output system represented by t-1 y(t) = 2 ( x(y - 3) dy where x(t) is the input and y(t) is the output, a) Determine whether the system is linear or non-linear. b) Determine the impulse response h(t, to) of the system by setting x(t)= 8(t–to). c) Determine whether the system is time invariant or time variant. d) Determine whether the system is causal or non-causal.
Most questions answered within 3 hours.
-
a bottle cap manufacturer with four machines and six operators
wants to see if variation in...
asked 45 minutes ago -
State Farm Insurance studies show that in Colorado, 55% of the
auto insurance claims submitted for...
asked 1 hour ago -
Complete the following reactions which form ethers (A
and B) and cyclic ethers (C-E) as major...
asked 1 hour ago -
in a perfectly elastic collision what is the velocity of ball A
if the original direction...
asked 2 hours ago -
PLEASE ANSWER ALL
1) The pressure of the atmosphere decreases with increasing
altitude in the
Choose...
asked 2 hours ago -
A simple random sample of 25,000 individuals are surveyed in
order to determine the prevalence of...
asked 2 hours ago -
People who do very detailed work close up, such as jewelers,
often can see objects clearly...
asked 2 hours ago -
14 years ago, Blue Lake Corp. issued 30 year to maturity
zero-coupon bonds with a par...
asked 2 hours ago -
Warnerwoods Company uses a perpetual inventory system. It
entered into the following purchases and sales transactions...
asked 2 hours ago -
Equivalent Units of Conversion Costs
The Rolling Department of Oak Ridge Steel Company had 6,842 tons...
asked 2 hours ago -
what does the concept of "core competence" mean? why
is this concept important? How would you...
asked 2 hours ago -
__________ is a type of visualization that is linked to strategy
and used within a formal...
asked 2 hours ago