Please show all work so I can rate thumbs up.
Homework Answers

Add Answer to:
Please show all work so I can rate thumbs up.
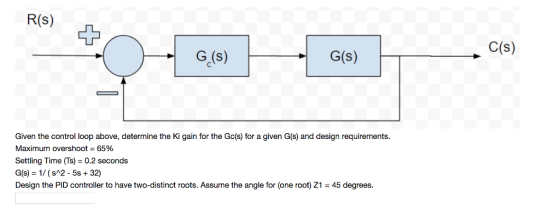
R(s) C(s) G.(s) G(s) Given the...
R(s) C(s) G (s) G(s) Given the control loop above, determine the Kd gain for the Gc(s) for a given G(s) and design requirements. Peak Time (Tp) 0.25 second Settling time (Ts) 0.8 second G(s) 1/s211s2...
 R(s) C(s) G (s) G(s) Given the control loop above, determine the Kd gain for the Gc(s) for a given G(s) and design requirements. Peak Time (Tp) 0.25 second Settling time (Ts) 0.8 second G(s) 1/s211s28) Design the PID controller to have two-distinct roots. Assume the angle for (one root) Z1 30 degrees.
R(s) C(s) G (s) G(s) Given the control loop above, determine the Kd gain for the Gc(s) for a given G(s) and design requirements. Peak Time (Tp)...
R(s) C(s) G (s) G(s) Given the control loop above, determine the Kd gain for the Gc(s) for a given G(s) and design requirements. Peak Time (Tp) 0.25 second Settling time (Ts) 0.8 second G(s) 1/s211s28) Design the PID controller to have two-distinct roots. Assume the angle for (one root) Z1 30 degrees.
R(s) C(s) G (s) G(s) Given the control loop above, determine the Kd gain for the Gc(s) for a given G(s) and design requirements. Peak Time (Tp)...
Given the control loop above, determine the Kp gain for the Gc(s) for a given G(s) and design requirements. Peak Time (Tp) = 1/2 second Settling time (Ts) = 1 second G(s) = 1/ ( s^2 + 5s + 5.25) Desi...
 Given the control loop above, determine the Kp gain for the
Gc(s) for a given G(s) and design requirements.
Peak Time (Tp) = 1/2 second
Settling time (Ts) = 1 second
G(s) = 1/ ( s^2 + 5s + 5.25)
Design the PID controller to have two-distinct roots. Assume the
angle for (one root) Z1 = 30 degrees.
QUESTION 1 10 points a Answer R(s) C(s) G.(s) G(s) Given the control loop above, determine the Kp gain for the Gcis)...
Given the control loop above, determine the Kp gain for the
Gc(s) for a given G(s) and design requirements.
Peak Time (Tp) = 1/2 second
Settling time (Ts) = 1 second
G(s) = 1/ ( s^2 + 5s + 5.25)
Design the PID controller to have two-distinct roots. Assume the
angle for (one root) Z1 = 30 degrees.
QUESTION 1 10 points a Answer R(s) C(s) G.(s) G(s) Given the control loop above, determine the Kp gain for the Gcis)...
QUESTION 3 Copy of R(s) C(s) G(s) Given the control loop above, determine the overall gain K for the Gc(s) for a given G(s) and design requirements. Peak Time (Tp) 0.2 second Settling time (Ts)-0.12...
 QUESTION 3 Copy of R(s) C(s) G(s) Given the control loop above, determine the overall gain K for the Gc(s) for a given G(s) and design requirements. Peak Time (Tp) 0.2 second Settling time (Ts)-0.12 second G(s) 1/ (s24) Design a Dual PD controller to have two-distinct roots. Assume the angle for (one zero) Z1 60 degrees.
QUESTION 3 Copy of R(s) C(s) G(s) Given the control loop above, determine the overall gain K for the Gc(s) for a given...
QUESTION 3 Copy of R(s) C(s) G(s) Given the control loop above, determine the overall gain K for the Gc(s) for a given G(s) and design requirements. Peak Time (Tp) 0.2 second Settling time (Ts)-0.12 second G(s) 1/ (s24) Design a Dual PD controller to have two-distinct roots. Assume the angle for (one zero) Z1 60 degrees.
QUESTION 3 Copy of R(s) C(s) G(s) Given the control loop above, determine the overall gain K for the Gc(s) for a given...
Given the control loop above, determine the overall gain K for the Gc(s) for a given G(s) and design requirements. Peak Time (Tp) = 0.2 second Settling time (Ts) = 0.25 second G(s) = 1/ ( s^2 + 10s +...
 Given the control loop above, determine the overall gain K for
the Gc(s) for a given G(s) and design requirements.
Peak Time (Tp) = 0.2 second
Settling time (Ts) = 0.25 second
G(s) = 1/ ( s^2 + 10s + 221)
Design a Dual PD controller to have two-distinct roots. Assume
the angle for (one zero) Z1 = 10 degrees.
R(s) C(s) G(s) G(s) Given the control loop above, determine the overall gain K for the Gc(s) for a given...
Given the control loop above, determine the overall gain K for
the Gc(s) for a given G(s) and design requirements.
Peak Time (Tp) = 0.2 second
Settling time (Ts) = 0.25 second
G(s) = 1/ ( s^2 + 10s + 221)
Design a Dual PD controller to have two-distinct roots. Assume
the angle for (one zero) Z1 = 10 degrees.
R(s) C(s) G(s) G(s) Given the control loop above, determine the overall gain K for the Gc(s) for a given...
QUESTION 2 10 points Save Answer R(s) C(s) G(s) Given the control loop above, determine the overall gain K for the Gc(s for a given G(s) and design requirements. Peak Time (Tp) 0.2 second Settling ti...
 QUESTION 2 10 points Save Answer R(s) C(s) G(s) Given the control loop above, determine the overall gain K for the Gc(s for a given G(s) and design requirements. Peak Time (Tp) 0.2 second Settling time (Ts) 0.25 second Design a Dual PD controller to have two-distinct roots. Assume the angle for (one zero) Z1 60 degrees.
QUESTION 2 10 points Save Answer R(s) C(s) G(s) Given the control loop above, determine the overall gain K for the Gc(s for...
QUESTION 2 10 points Save Answer R(s) C(s) G(s) Given the control loop above, determine the overall gain K for the Gc(s for a given G(s) and design requirements. Peak Time (Tp) 0.2 second Settling time (Ts) 0.25 second Design a Dual PD controller to have two-distinct roots. Assume the angle for (one zero) Z1 60 degrees.
QUESTION 2 10 points Save Answer R(s) C(s) G(s) Given the control loop above, determine the overall gain K for the Gc(s for...
QUESTION 3 Copy of R(s) C(s) G(s) G (s) Given the control loop above, determine the overall gain K for the Gc(s) for a given G(s) and design requirements. Peak Time (Tp) = 0.2 second Settling time (T...
 QUESTION 3 Copy of R(s) C(s) G(s) G (s) Given the control loop above, determine the overall gain K for the Gc(s) for a given G(s) and design requirements. Peak Time (Tp) = 0.2 second Settling time (TS) = 0.12 second G(s) = 1/ (s^2 + .1s+4) Design a Dual PD controller to have two-distinct roots. Assume the angle for (one zero) Z1 - 60 degrees.
QUESTION 3 Copy of R(s) C(s) G(s) G (s) Given the control loop above,...
QUESTION 3 Copy of R(s) C(s) G(s) G (s) Given the control loop above, determine the overall gain K for the Gc(s) for a given G(s) and design requirements. Peak Time (Tp) = 0.2 second Settling time (TS) = 0.12 second G(s) = 1/ (s^2 + .1s+4) Design a Dual PD controller to have two-distinct roots. Assume the angle for (one zero) Z1 - 60 degrees.
QUESTION 3 Copy of R(s) C(s) G(s) G (s) Given the control loop above,...
Copy of R(s) G (s) อา G(s) C(s) Given the control loop above, determine the overall gain K for the Gc(s) for a given G(s) and design requirements Peak Time (Tp) 0.2 second Settling time (Ts)-0.12...
 Copy of R(s) G (s) อา G(s) C(s) Given the control loop above, determine the overall gain K for the Gc(s) for a given G(s) and design requirements Peak Time (Tp) 0.2 second Settling time (Ts)-0.12 second Design a Dual PD controller to have two-distinct roots. Assume the angle for (one zero) Z1 60 degreos.
Copy of R(s) G (s) อา G(s) C(s) Given the control loop above, determine the overall gain K for the Gc(s) for a given G(s)...
Copy of R(s) G (s) อา G(s) C(s) Given the control loop above, determine the overall gain K for the Gc(s) for a given G(s) and design requirements Peak Time (Tp) 0.2 second Settling time (Ts)-0.12 second Design a Dual PD controller to have two-distinct roots. Assume the angle for (one zero) Z1 60 degreos.
Copy of R(s) G (s) อา G(s) C(s) Given the control loop above, determine the overall gain K for the Gc(s) for a given G(s)...
suppose Enrollment No is 2222. Please solve it ASAP, Thumbs up for sure. . solve it....
 suppose Enrollment No is 2222.
Please solve it ASAP, Thumbs up for sure.
.
solve it.
solve it.
solve it
numerator of G(s) is 1.
Design PID controller: A- Design a PID (or PD or Pl) Controller for a process plant whose transfer function is given as: G(s) = / s(s+10) (s+20) Your design should meet the overshoot requirement of 10% and settling time of ABCD ms (milli-seconds), (where ABCD are last 4 right hand side digits of your enrollment...
suppose Enrollment No is 2222.
Please solve it ASAP, Thumbs up for sure.
.
solve it.
solve it.
solve it
numerator of G(s) is 1.
Design PID controller: A- Design a PID (or PD or Pl) Controller for a process plant whose transfer function is given as: G(s) = / s(s+10) (s+20) Your design should meet the overshoot requirement of 10% and settling time of ABCD ms (milli-seconds), (where ABCD are last 4 right hand side digits of your enrollment...
Question: CODE: >> %% PID controller design Kp = 65.2861; Ki = 146.8418; Kd = 4.0444;...
 Question:
CODE:
>> %% PID controller design
Kp = 65.2861;
Ki = 146.8418;
Kd = 4.0444;
Gc = pid(Kp,Ki,Kd);
% close-loop TF
T = feedback(G*Gc,1);
%% checking the design obejective
a_pid = stepinfo(T);
% Settling Time
tp_pid = a_pid.SettlingTime
% Overshhot
OS_pid = a_pid.Overshoot
%% steady-state error
[yout_pid,tout_pid] = lsim(T,stepInput,t);
% steady-state error
ess_pid = stepInput(end) - yout_pid(end);
>> %% Effect of P in G
Kp = 65.2861;
Ki = 0;
Kd = 0;
Gc = pid(Kp,Ki,Kd);
% close-loop TF...
Question:
CODE:
>> %% PID controller design
Kp = 65.2861;
Ki = 146.8418;
Kd = 4.0444;
Gc = pid(Kp,Ki,Kd);
% close-loop TF
T = feedback(G*Gc,1);
%% checking the design obejective
a_pid = stepinfo(T);
% Settling Time
tp_pid = a_pid.SettlingTime
% Overshhot
OS_pid = a_pid.Overshoot
%% steady-state error
[yout_pid,tout_pid] = lsim(T,stepInput,t);
% steady-state error
ess_pid = stepInput(end) - yout_pid(end);
>> %% Effect of P in G
Kp = 65.2861;
Ki = 0;
Kd = 0;
Gc = pid(Kp,Ki,Kd);
% close-loop TF...
I have no more posting for this month, please solve these for me thanks 1. Given...
 I have no more posting for this month, please solve these for me
thanks
1. Given the following unity feedback system where s+z s2 (s + 10) and the controller is a proportional controller Ge = K, do the following: a. If z = 2, find K so that the damped frequency of the oscillation of the transient response is 5 rad/s. b. The system is to be redesigned by changing the values of z and K. If the new...
I have no more posting for this month, please solve these for me
thanks
1. Given the following unity feedback system where s+z s2 (s + 10) and the controller is a proportional controller Ge = K, do the following: a. If z = 2, find K so that the damped frequency of the oscillation of the transient response is 5 rad/s. b. The system is to be redesigned by changing the values of z and K. If the new...
 R(s) C(s) G (s) G(s) Given the control loop above, determine the Kd gain for the Gc(s) for a given G(s) and design requirements. Peak Time (Tp) 0.25 second Settling time (Ts) 0.8 second G(s) 1/s211s28) Design the PID controller to have two-distinct roots. Assume the angle for (one root) Z1 30 degrees.
R(s) C(s) G (s) G(s) Given the control loop above, determine the Kd gain for the Gc(s) for a given G(s) and design requirements. Peak Time (Tp)...
R(s) C(s) G (s) G(s) Given the control loop above, determine the Kd gain for the Gc(s) for a given G(s) and design requirements. Peak Time (Tp) 0.25 second Settling time (Ts) 0.8 second G(s) 1/s211s28) Design the PID controller to have two-distinct roots. Assume the angle for (one root) Z1 30 degrees.
R(s) C(s) G (s) G(s) Given the control loop above, determine the Kd gain for the Gc(s) for a given G(s) and design requirements. Peak Time (Tp)...
 Given the control loop above, determine the Kp gain for the
Gc(s) for a given G(s) and design requirements.
Peak Time (Tp) = 1/2 second
Settling time (Ts) = 1 second
G(s) = 1/ ( s^2 + 5s + 5.25)
Design the PID controller to have two-distinct roots. Assume the
angle for (one root) Z1 = 30 degrees.
QUESTION 1 10 points a Answer R(s) C(s) G.(s) G(s) Given the control loop above, determine the Kp gain for the Gcis)...
Given the control loop above, determine the Kp gain for the
Gc(s) for a given G(s) and design requirements.
Peak Time (Tp) = 1/2 second
Settling time (Ts) = 1 second
G(s) = 1/ ( s^2 + 5s + 5.25)
Design the PID controller to have two-distinct roots. Assume the
angle for (one root) Z1 = 30 degrees.
QUESTION 1 10 points a Answer R(s) C(s) G.(s) G(s) Given the control loop above, determine the Kp gain for the Gcis)...
 QUESTION 3 Copy of R(s) C(s) G(s) Given the control loop above, determine the overall gain K for the Gc(s) for a given G(s) and design requirements. Peak Time (Tp) 0.2 second Settling time (Ts)-0.12 second G(s) 1/ (s24) Design a Dual PD controller to have two-distinct roots. Assume the angle for (one zero) Z1 60 degrees.
QUESTION 3 Copy of R(s) C(s) G(s) Given the control loop above, determine the overall gain K for the Gc(s) for a given...
QUESTION 3 Copy of R(s) C(s) G(s) Given the control loop above, determine the overall gain K for the Gc(s) for a given G(s) and design requirements. Peak Time (Tp) 0.2 second Settling time (Ts)-0.12 second G(s) 1/ (s24) Design a Dual PD controller to have two-distinct roots. Assume the angle for (one zero) Z1 60 degrees.
QUESTION 3 Copy of R(s) C(s) G(s) Given the control loop above, determine the overall gain K for the Gc(s) for a given...
 Given the control loop above, determine the overall gain K for
the Gc(s) for a given G(s) and design requirements.
Peak Time (Tp) = 0.2 second
Settling time (Ts) = 0.25 second
G(s) = 1/ ( s^2 + 10s + 221)
Design a Dual PD controller to have two-distinct roots. Assume
the angle for (one zero) Z1 = 10 degrees.
R(s) C(s) G(s) G(s) Given the control loop above, determine the overall gain K for the Gc(s) for a given...
Given the control loop above, determine the overall gain K for
the Gc(s) for a given G(s) and design requirements.
Peak Time (Tp) = 0.2 second
Settling time (Ts) = 0.25 second
G(s) = 1/ ( s^2 + 10s + 221)
Design a Dual PD controller to have two-distinct roots. Assume
the angle for (one zero) Z1 = 10 degrees.
R(s) C(s) G(s) G(s) Given the control loop above, determine the overall gain K for the Gc(s) for a given...
 QUESTION 2 10 points Save Answer R(s) C(s) G(s) Given the control loop above, determine the overall gain K for the Gc(s for a given G(s) and design requirements. Peak Time (Tp) 0.2 second Settling time (Ts) 0.25 second Design a Dual PD controller to have two-distinct roots. Assume the angle for (one zero) Z1 60 degrees.
QUESTION 2 10 points Save Answer R(s) C(s) G(s) Given the control loop above, determine the overall gain K for the Gc(s for...
QUESTION 2 10 points Save Answer R(s) C(s) G(s) Given the control loop above, determine the overall gain K for the Gc(s for a given G(s) and design requirements. Peak Time (Tp) 0.2 second Settling time (Ts) 0.25 second Design a Dual PD controller to have two-distinct roots. Assume the angle for (one zero) Z1 60 degrees.
QUESTION 2 10 points Save Answer R(s) C(s) G(s) Given the control loop above, determine the overall gain K for the Gc(s for...
 QUESTION 3 Copy of R(s) C(s) G(s) G (s) Given the control loop above, determine the overall gain K for the Gc(s) for a given G(s) and design requirements. Peak Time (Tp) = 0.2 second Settling time (TS) = 0.12 second G(s) = 1/ (s^2 + .1s+4) Design a Dual PD controller to have two-distinct roots. Assume the angle for (one zero) Z1 - 60 degrees.
QUESTION 3 Copy of R(s) C(s) G(s) G (s) Given the control loop above,...
QUESTION 3 Copy of R(s) C(s) G(s) G (s) Given the control loop above, determine the overall gain K for the Gc(s) for a given G(s) and design requirements. Peak Time (Tp) = 0.2 second Settling time (TS) = 0.12 second G(s) = 1/ (s^2 + .1s+4) Design a Dual PD controller to have two-distinct roots. Assume the angle for (one zero) Z1 - 60 degrees.
QUESTION 3 Copy of R(s) C(s) G(s) G (s) Given the control loop above,...
 Copy of R(s) G (s) อา G(s) C(s) Given the control loop above, determine the overall gain K for the Gc(s) for a given G(s) and design requirements Peak Time (Tp) 0.2 second Settling time (Ts)-0.12 second Design a Dual PD controller to have two-distinct roots. Assume the angle for (one zero) Z1 60 degreos.
Copy of R(s) G (s) อา G(s) C(s) Given the control loop above, determine the overall gain K for the Gc(s) for a given G(s)...
Copy of R(s) G (s) อา G(s) C(s) Given the control loop above, determine the overall gain K for the Gc(s) for a given G(s) and design requirements Peak Time (Tp) 0.2 second Settling time (Ts)-0.12 second Design a Dual PD controller to have two-distinct roots. Assume the angle for (one zero) Z1 60 degreos.
Copy of R(s) G (s) อา G(s) C(s) Given the control loop above, determine the overall gain K for the Gc(s) for a given G(s)...
 suppose Enrollment No is 2222.
Please solve it ASAP, Thumbs up for sure.
.
solve it.
solve it.
solve it
numerator of G(s) is 1.
Design PID controller: A- Design a PID (or PD or Pl) Controller for a process plant whose transfer function is given as: G(s) = / s(s+10) (s+20) Your design should meet the overshoot requirement of 10% and settling time of ABCD ms (milli-seconds), (where ABCD are last 4 right hand side digits of your enrollment...
suppose Enrollment No is 2222.
Please solve it ASAP, Thumbs up for sure.
.
solve it.
solve it.
solve it
numerator of G(s) is 1.
Design PID controller: A- Design a PID (or PD or Pl) Controller for a process plant whose transfer function is given as: G(s) = / s(s+10) (s+20) Your design should meet the overshoot requirement of 10% and settling time of ABCD ms (milli-seconds), (where ABCD are last 4 right hand side digits of your enrollment...
 Question:
CODE:
>> %% PID controller design
Kp = 65.2861;
Ki = 146.8418;
Kd = 4.0444;
Gc = pid(Kp,Ki,Kd);
% close-loop TF
T = feedback(G*Gc,1);
%% checking the design obejective
a_pid = stepinfo(T);
% Settling Time
tp_pid = a_pid.SettlingTime
% Overshhot
OS_pid = a_pid.Overshoot
%% steady-state error
[yout_pid,tout_pid] = lsim(T,stepInput,t);
% steady-state error
ess_pid = stepInput(end) - yout_pid(end);
>> %% Effect of P in G
Kp = 65.2861;
Ki = 0;
Kd = 0;
Gc = pid(Kp,Ki,Kd);
% close-loop TF...
Question:
CODE:
>> %% PID controller design
Kp = 65.2861;
Ki = 146.8418;
Kd = 4.0444;
Gc = pid(Kp,Ki,Kd);
% close-loop TF
T = feedback(G*Gc,1);
%% checking the design obejective
a_pid = stepinfo(T);
% Settling Time
tp_pid = a_pid.SettlingTime
% Overshhot
OS_pid = a_pid.Overshoot
%% steady-state error
[yout_pid,tout_pid] = lsim(T,stepInput,t);
% steady-state error
ess_pid = stepInput(end) - yout_pid(end);
>> %% Effect of P in G
Kp = 65.2861;
Ki = 0;
Kd = 0;
Gc = pid(Kp,Ki,Kd);
% close-loop TF...
 I have no more posting for this month, please solve these for me
thanks
1. Given the following unity feedback system where s+z s2 (s + 10) and the controller is a proportional controller Ge = K, do the following: a. If z = 2, find K so that the damped frequency of the oscillation of the transient response is 5 rad/s. b. The system is to be redesigned by changing the values of z and K. If the new...
I have no more posting for this month, please solve these for me
thanks
1. Given the following unity feedback system where s+z s2 (s + 10) and the controller is a proportional controller Ge = K, do the following: a. If z = 2, find K so that the damped frequency of the oscillation of the transient response is 5 rad/s. b. The system is to be redesigned by changing the values of z and K. If the new...
Most questions answered within 3 hours.
-
Determine the temperature (in Celsius) at which 1.00 mole of an
ideal gas will have a...
asked 16 minutes ago -
Japan’s combination of X and Y
Canada’s combination of X and Y
100x and 0y
50x...
asked 8 minutes ago -
[1] Household statistics include individuals living alone or in
groups in:
A) apartments.
B) military barracks....
asked 19 minutes ago -
What is the % w/v when 80 mL of a 2.0% solution is mixed with 50...
asked 22 minutes ago -
How can I solve the following using a TI83
Claim: Most adults would erase all of...
asked 35 minutes ago -
Analysis of 3-ethyl-3-buten-2-ol gave C, 72.13%; H, 11.92%.
Calculate the percent deviation of these results from...
asked 32 minutes ago -
Which VALS segment is most likely to have a top of the line
brand new (2015)...
asked 36 minutes ago -
Write a program to score the paper-rock-scissor game. Each of
two users types in either P,R...
asked 56 minutes ago -
Calculate the equillibrium constent K for a redox reaction that
has E°cell = -.98 V at...
asked 1 hour ago -
A concave spherical mirror has a radius of curvature of
magnitude 19.6 cm.
(a) Find the...
asked 1 hour ago -
3. draw a diagram of the magnetic field:
a. around a long straight wire with a...
asked 1 hour ago -
If you titrated 30.0 mL of 0.1 M HCl with 0.1 M NaOH, indicate
the approximate...
asked 1 hour ago