

Homework Answers

as we are defining composition H must be from 



so the standard matrix must be 2 X 3 matrix
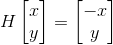
H is a reflection from 
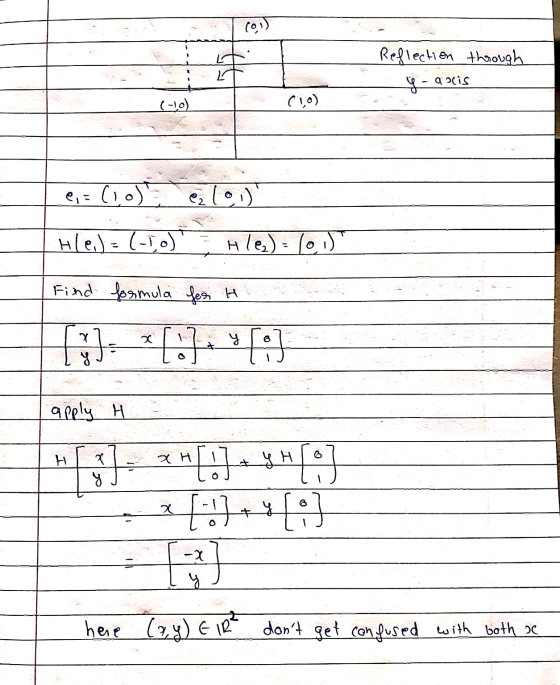
therefore


so standard matrix for 
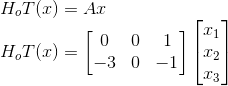
 standard matrix .
standard matrix .
Add Answer to:
Consider the linear transformation T: R3 + R2 defined as T(X1, X2, 23)=(-23, -3 &1 –...
Consider the linear transformation T : R2 + R2 defined as T(21,12)=(0,21 – 12). Find the...
 Consider the linear transformation T : R2 + R2 defined as T(21,12)=(0,21 – 12). Find the standard matrix for T: a ab sin(a) 8 f E д 0 0 1 What is the dimension of ker(T)? Is T one-to-one? no 47 Enter one: yes no Write the standard matrix for HoT, where H is the reflection of R2 about the z-axis. a ab sin(a) f 12 II 8 R ат
Consider the linear transformation T : R2 + R2 defined as T(21,12)=(0,21 – 12). Find the standard matrix for T: a ab sin(a) 8 f E д 0 0 1 What is the dimension of ker(T)? Is T one-to-one? no 47 Enter one: yes no Write the standard matrix for HoT, where H is the reflection of R2 about the z-axis. a ab sin(a) f 12 II 8 R ат
R2 defined as Consider the linear transformation T: R2 T(21,22)=(0,21 – 22) Find the standard matrix...
 R2 defined as Consider the linear transformation T: R2 T(21,22)=(0,21 – 22) Find the standard matrix for T: a ab sin (a) f 8 ат What is the dimensi of ker(T)? Is T one-to-one? Enter one: yes no Write the standard matrix for HoT, where H is the reflection of R2 about the 3-axis. a sin(a) f 22 8 R a E är (Alt + A)
R2 defined as Consider the linear transformation T: R2 T(21,22)=(0,21 – 22) Find the standard matrix for T: a ab sin (a) f 8 ат What is the dimensi of ker(T)? Is T one-to-one? Enter one: yes no Write the standard matrix for HoT, where H is the reflection of R2 about the 3-axis. a sin(a) f 22 8 R a E är (Alt + A)
Consider the linear transformation T: R4 + R2 defined as T(11,12,13,14)=(-221 +22 +2 14,322 -14) Find...
 Consider the linear transformation T: R4 + R2 defined as T(11,12,13,14)=(-221 +22 +2 14,322 -14) Find the standard matrix for T: ab sin(a) f 8 a 12 . ar What is the dimension of ker(T)? Number Is T one-to-one? Enter one yes no Write the standard matrix for HoT, where H is the reflection of R2 about the line y=1. ab sin(a) f αο α Ω TI д
Consider the linear transformation T: R4 + R2 defined as T(11,12,13,14)=(-221 +22 +2 14,322 -14) Find the standard matrix for T: ab sin(a) f 8 a 12 . ar What is the dimension of ker(T)? Number Is T one-to-one? Enter one yes no Write the standard matrix for HoT, where H is the reflection of R2 about the line y=1. ab sin(a) f αο α Ω TI д
ebra MTAS Consider the linear transformation T: R4 R2 defined as T(*1,42,43,44)=(-22 - 3 x3 +2...
 ebra MTAS Consider the linear transformation T: R4 R2 defined as T(*1,42,43,44)=(-22 - 3 x3 +2 34,-333 +384). Find the standard matrix for T: sin(a) a Or f 8 R Ω What is the dimension of ker(T)? Is T one-to-one? AY Enter one: yes no Write the standard matrix for HT, where H is the reflection of R2 about the x-axis. ed sin(a) a ax f 8. a Ω
ebra MTAS Consider the linear transformation T: R4 R2 defined as T(*1,42,43,44)=(-22 - 3 x3 +2 34,-333 +384). Find the standard matrix for T: sin(a) a Or f 8 R Ω What is the dimension of ker(T)? Is T one-to-one? AY Enter one: yes no Write the standard matrix for HT, where H is the reflection of R2 about the x-axis. ed sin(a) a ax f 8. a Ω
Let T be the linear transformation from R3 into R2 defined by (1) For the standard...
 Let T be the linear transformation from R3 into R2 defined by (1) For the standard ordered bases a and ß for R3 and IR2 respectively, find the associated matrix for T with respect to the bases α and β. (2) Let α = {x1 , X2, X3) and β = {yı, ys), where x1 = (1,0,-1), x2 = - (1,0). Find the associated (1,1,1), хз-(1,0,0), and y,-(0, 1), Уг matrices T]g and T12
Let T be the linear transformation from R3 into R2 defined by (1) For the standard ordered bases a and ß for R3 and IR2 respectively, find the associated matrix for T with respect to the bases α and β. (2) Let α = {x1 , X2, X3) and β = {yı, ys), where x1 = (1,0,-1), x2 = - (1,0). Find the associated (1,1,1), хз-(1,0,0), and y,-(0, 1), Уг matrices T]g and T12
[E] Consider the linear transformation T: R3 → R3 given by: T(X1, X2, X3) = (x1...
 [E] Consider the linear transformation T: R3 → R3 given by: T(X1, X2, X3) = (x1 + 2xz, 3x1 + x2 + 4x3, 5x1 + x2 + 8x3) (E.1) Write down the standard matrix for the transformation; i.e. [T]. (E.2) Obtain bases for the kernel of T and for the range of T. (E.3) Fill in the blanks below with the appropriate number. The rank of T = The nullity of T = (E.4) Is T invertible? Justify your response....
[E] Consider the linear transformation T: R3 → R3 given by: T(X1, X2, X3) = (x1 + 2xz, 3x1 + x2 + 4x3, 5x1 + x2 + 8x3) (E.1) Write down the standard matrix for the transformation; i.e. [T]. (E.2) Obtain bases for the kernel of T and for the range of T. (E.3) Fill in the blanks below with the appropriate number. The rank of T = The nullity of T = (E.4) Is T invertible? Justify your response....
Let x = [X1 X2 X3], and let T:R3 → R3 be the linear transformation defined...
 Let x = [X1 X2 X3], and let T:R3 → R3 be the linear transformation defined by x1 + 5x2 – x3 T(x) - X2 x1 + 2x3 Let B be the standard basis for R3 and let B' = {V1, V2, V3}, where 4 4. ---- 4 and v3 -- 4 Find the matrix of T with respect to the basis B, and then use Theorem 8.5.2 to compute the matrix of T with respect to the basis B”....
Let x = [X1 X2 X3], and let T:R3 → R3 be the linear transformation defined by x1 + 5x2 – x3 T(x) - X2 x1 + 2x3 Let B be the standard basis for R3 and let B' = {V1, V2, V3}, where 4 4. ---- 4 and v3 -- 4 Find the matrix of T with respect to the basis B, and then use Theorem 8.5.2 to compute the matrix of T with respect to the basis B”....
Consider the following linear transformation T: RS → R3 where T(X1, X2, X3, X4, X5) =...
 Consider the following linear transformation T: RS → R3 where T(X1, X2, X3, X4, X5) = (x1-X3+X4, 2X1+X2-X3+2x4, -2X1+3x3-3x4+x5) (a) Determine the standard matrix representation A of T(x).
Consider the following linear transformation T: RS → R3 where T(X1, X2, X3, X4, X5) = (x1-X3+X4, 2X1+X2-X3+2x4, -2X1+3x3-3x4+x5) (a) Determine the standard matrix representation A of T(x).
For real non-zero constants a and b, consider the linear transformation T: R3 + R3 defined...
 For real non-zero constants a and b, consider the linear transformation T: R3 + R3 defined by orthogonal reflection in the plane ay + b2 = 0 where orthogonality is defined with respect to the dot product on R3 x R3. Find in terms of a and b the numerical entries of the matrix Aſ that represents T with respect to the standard ordered basis {el, C2, C3} of R3.
For real non-zero constants a and b, consider the linear transformation T: R3 + R3 defined by orthogonal reflection in the plane ay + b2 = 0 where orthogonality is defined with respect to the dot product on R3 x R3. Find in terms of a and b the numerical entries of the matrix Aſ that represents T with respect to the standard ordered basis {el, C2, C3} of R3.
For real non-zero constants a and b, consider the linear transformation T: R3 + R3 defined...
 For real non-zero constants a and b, consider the linear transformation T: R3 + R3 defined by orthogonal reflection in the plane ay + b2 = 0 where orthogonality is defined with respect to the dot product on R3 x R3. Find in terms of a and b the numerical entries of the matrix Aſ that represents T with respect to the standard ordered basis {el, C2, C3} of R3.
For real non-zero constants a and b, consider the linear transformation T: R3 + R3 defined by orthogonal reflection in the plane ay + b2 = 0 where orthogonality is defined with respect to the dot product on R3 x R3. Find in terms of a and b the numerical entries of the matrix Aſ that represents T with respect to the standard ordered basis {el, C2, C3} of R3.
 Consider the linear transformation T : R2 + R2 defined as T(21,12)=(0,21 – 12). Find the standard matrix for T: a ab sin(a) 8 f E д 0 0 1 What is the dimension of ker(T)? Is T one-to-one? no 47 Enter one: yes no Write the standard matrix for HoT, where H is the reflection of R2 about the z-axis. a ab sin(a) f 12 II 8 R ат
Consider the linear transformation T : R2 + R2 defined as T(21,12)=(0,21 – 12). Find the standard matrix for T: a ab sin(a) 8 f E д 0 0 1 What is the dimension of ker(T)? Is T one-to-one? no 47 Enter one: yes no Write the standard matrix for HoT, where H is the reflection of R2 about the z-axis. a ab sin(a) f 12 II 8 R ат
 R2 defined as Consider the linear transformation T: R2 T(21,22)=(0,21 – 22) Find the standard matrix for T: a ab sin (a) f 8 ат What is the dimensi of ker(T)? Is T one-to-one? Enter one: yes no Write the standard matrix for HoT, where H is the reflection of R2 about the 3-axis. a sin(a) f 22 8 R a E är (Alt + A)
R2 defined as Consider the linear transformation T: R2 T(21,22)=(0,21 – 22) Find the standard matrix for T: a ab sin (a) f 8 ат What is the dimensi of ker(T)? Is T one-to-one? Enter one: yes no Write the standard matrix for HoT, where H is the reflection of R2 about the 3-axis. a sin(a) f 22 8 R a E är (Alt + A)
 Consider the linear transformation T: R4 + R2 defined as T(11,12,13,14)=(-221 +22 +2 14,322 -14) Find the standard matrix for T: ab sin(a) f 8 a 12 . ar What is the dimension of ker(T)? Number Is T one-to-one? Enter one yes no Write the standard matrix for HoT, where H is the reflection of R2 about the line y=1. ab sin(a) f αο α Ω TI д
Consider the linear transformation T: R4 + R2 defined as T(11,12,13,14)=(-221 +22 +2 14,322 -14) Find the standard matrix for T: ab sin(a) f 8 a 12 . ar What is the dimension of ker(T)? Number Is T one-to-one? Enter one yes no Write the standard matrix for HoT, where H is the reflection of R2 about the line y=1. ab sin(a) f αο α Ω TI д
 ebra MTAS Consider the linear transformation T: R4 R2 defined as T(*1,42,43,44)=(-22 - 3 x3 +2 34,-333 +384). Find the standard matrix for T: sin(a) a Or f 8 R Ω What is the dimension of ker(T)? Is T one-to-one? AY Enter one: yes no Write the standard matrix for HT, where H is the reflection of R2 about the x-axis. ed sin(a) a ax f 8. a Ω
ebra MTAS Consider the linear transformation T: R4 R2 defined as T(*1,42,43,44)=(-22 - 3 x3 +2 34,-333 +384). Find the standard matrix for T: sin(a) a Or f 8 R Ω What is the dimension of ker(T)? Is T one-to-one? AY Enter one: yes no Write the standard matrix for HT, where H is the reflection of R2 about the x-axis. ed sin(a) a ax f 8. a Ω
 Let T be the linear transformation from R3 into R2 defined by (1) For the standard ordered bases a and ß for R3 and IR2 respectively, find the associated matrix for T with respect to the bases α and β. (2) Let α = {x1 , X2, X3) and β = {yı, ys), where x1 = (1,0,-1), x2 = - (1,0). Find the associated (1,1,1), хз-(1,0,0), and y,-(0, 1), Уг matrices T]g and T12
Let T be the linear transformation from R3 into R2 defined by (1) For the standard ordered bases a and ß for R3 and IR2 respectively, find the associated matrix for T with respect to the bases α and β. (2) Let α = {x1 , X2, X3) and β = {yı, ys), where x1 = (1,0,-1), x2 = - (1,0). Find the associated (1,1,1), хз-(1,0,0), and y,-(0, 1), Уг matrices T]g and T12
 [E] Consider the linear transformation T: R3 → R3 given by: T(X1, X2, X3) = (x1 + 2xz, 3x1 + x2 + 4x3, 5x1 + x2 + 8x3) (E.1) Write down the standard matrix for the transformation; i.e. [T]. (E.2) Obtain bases for the kernel of T and for the range of T. (E.3) Fill in the blanks below with the appropriate number. The rank of T = The nullity of T = (E.4) Is T invertible? Justify your response....
[E] Consider the linear transformation T: R3 → R3 given by: T(X1, X2, X3) = (x1 + 2xz, 3x1 + x2 + 4x3, 5x1 + x2 + 8x3) (E.1) Write down the standard matrix for the transformation; i.e. [T]. (E.2) Obtain bases for the kernel of T and for the range of T. (E.3) Fill in the blanks below with the appropriate number. The rank of T = The nullity of T = (E.4) Is T invertible? Justify your response....
 Let x = [X1 X2 X3], and let T:R3 → R3 be the linear transformation defined by x1 + 5x2 – x3 T(x) - X2 x1 + 2x3 Let B be the standard basis for R3 and let B' = {V1, V2, V3}, where 4 4. ---- 4 and v3 -- 4 Find the matrix of T with respect to the basis B, and then use Theorem 8.5.2 to compute the matrix of T with respect to the basis B”....
Let x = [X1 X2 X3], and let T:R3 → R3 be the linear transformation defined by x1 + 5x2 – x3 T(x) - X2 x1 + 2x3 Let B be the standard basis for R3 and let B' = {V1, V2, V3}, where 4 4. ---- 4 and v3 -- 4 Find the matrix of T with respect to the basis B, and then use Theorem 8.5.2 to compute the matrix of T with respect to the basis B”....
 Consider the following linear transformation T: RS → R3 where T(X1, X2, X3, X4, X5) = (x1-X3+X4, 2X1+X2-X3+2x4, -2X1+3x3-3x4+x5) (a) Determine the standard matrix representation A of T(x).
Consider the following linear transformation T: RS → R3 where T(X1, X2, X3, X4, X5) = (x1-X3+X4, 2X1+X2-X3+2x4, -2X1+3x3-3x4+x5) (a) Determine the standard matrix representation A of T(x).
 For real non-zero constants a and b, consider the linear transformation T: R3 + R3 defined by orthogonal reflection in the plane ay + b2 = 0 where orthogonality is defined with respect to the dot product on R3 x R3. Find in terms of a and b the numerical entries of the matrix Aſ that represents T with respect to the standard ordered basis {el, C2, C3} of R3.
For real non-zero constants a and b, consider the linear transformation T: R3 + R3 defined by orthogonal reflection in the plane ay + b2 = 0 where orthogonality is defined with respect to the dot product on R3 x R3. Find in terms of a and b the numerical entries of the matrix Aſ that represents T with respect to the standard ordered basis {el, C2, C3} of R3.
 For real non-zero constants a and b, consider the linear transformation T: R3 + R3 defined by orthogonal reflection in the plane ay + b2 = 0 where orthogonality is defined with respect to the dot product on R3 x R3. Find in terms of a and b the numerical entries of the matrix Aſ that represents T with respect to the standard ordered basis {el, C2, C3} of R3.
For real non-zero constants a and b, consider the linear transformation T: R3 + R3 defined by orthogonal reflection in the plane ay + b2 = 0 where orthogonality is defined with respect to the dot product on R3 x R3. Find in terms of a and b the numerical entries of the matrix Aſ that represents T with respect to the standard ordered basis {el, C2, C3} of R3.
Most questions answered within 3 hours.
-
How can having too little or too much of a certain
protein cause problems for an...
asked 24 minutes ago -
Assume a muscle has a PCSA = 20 cm2 and Lo = 12 cm. Assume it...
asked 2 hours ago -
What is the yield to maturity of a ten-year, $1,000 bond with a
5.2% coupon rate...
asked 2 hours ago -
A mass m = 5 kg is tied on one end of a rope and is...
asked 2 hours ago -
The Average sales price of single-family houses in Charlotte is
$210,000 with a standard deviation of...
asked 2 hours ago -
Target Costing
Laser Impressions, Inc., manufactures color laser printers.
Model J20 presently sells for $225 and...
asked 2 hours ago -
a bottle cap manufacturer with four machines and six operators
wants to see if variation in...
asked 3 hours ago -
State Farm Insurance studies show that in Colorado, 55% of the
auto insurance claims submitted for...
asked 4 hours ago -
Complete the following reactions which form ethers (A
and B) and cyclic ethers (C-E) as major...
asked 4 hours ago -
in a perfectly elastic collision what is the velocity of ball A
if the original direction...
asked 5 hours ago -
PLEASE ANSWER ALL
1) The pressure of the atmosphere decreases with increasing
altitude in the
Choose...
asked 5 hours ago -
A simple random sample of 25,000 individuals are surveyed in
order to determine the prevalence of...
asked 5 hours ago