

Homework Answers
1- 2- 3- 1 (10 points) Show that {u1, U2, U3} is an orthogonal basis for...
 1-
2-
3-
1 (10 points) Show that {u1, U2, U3} is an orthogonal basis for R3. Then express x as a linear 3 4 combination of the u's. u -3 U2 = 0 ,u3 5 6 -2 2 -1 (10 points) Suppose a vector y is orthogonal to vectors u and v. Prove that y is orthogonal to the vector 4u - 3v. 10. (2 points each) True or False: ( ) Eigenvalues must be nonzero scalars. ( )...
1-
2-
3-
1 (10 points) Show that {u1, U2, U3} is an orthogonal basis for R3. Then express x as a linear 3 4 combination of the u's. u -3 U2 = 0 ,u3 5 6 -2 2 -1 (10 points) Suppose a vector y is orthogonal to vectors u and v. Prove that y is orthogonal to the vector 4u - 3v. 10. (2 points each) True or False: ( ) Eigenvalues must be nonzero scalars. ( )...
1. (50 pts.) Let A be the 3 x 3 matrix A= 0 0 3 0...
 1. (50 pts.) Let A be the 3 x 3 matrix A= 0 0 3 0 2 0 3 0 0 :) i. Compute the eigenvectors ū1, U2, U3 of A. ii. Verify that the matrix S with columns ū ū2, öz has full rank. iii. Use the Gram-Schmidt process to change B into an orthogonal matrix P.
1. (50 pts.) Let A be the 3 x 3 matrix A= 0 0 3 0 2 0 3 0 0 :) i. Compute the eigenvectors ū1, U2, U3 of A. ii. Verify that the matrix S with columns ū ū2, öz has full rank. iii. Use the Gram-Schmidt process to change B into an orthogonal matrix P.
1 -1.2 5 Uį = U2 = -3 1, U3 = 2 , 14 = 29...
 1 -1.2 5 Uį = U2 = -3 1, U3 = 2 , 14 = 29 ( 7 Answer the following questions and give proper explanations. (a) Is {ui, U2, uz} a basis for R3? (b) Is {ui, U2, u4} a basis for R4? (c) Is {ui, U2, U3, U4, u; } a basis for R? (d) Is {ui, U2, U3, u} a basis for Rº?! (e) Are ui, u, and O linearly independent?! Problem 6. (15 points). Let A...
1 -1.2 5 Uį = U2 = -3 1, U3 = 2 , 14 = 29 ( 7 Answer the following questions and give proper explanations. (a) Is {ui, U2, uz} a basis for R3? (b) Is {ui, U2, u4} a basis for R4? (c) Is {ui, U2, U3, U4, u; } a basis for R? (d) Is {ui, U2, U3, u} a basis for Rº?! (e) Are ui, u, and O linearly independent?! Problem 6. (15 points). Let A...
3. [1 mark each] Determine which of the following statements are true and which are false....
 3. [1 mark each] Determine which of the following statements are true and which are false. (a) The inverse of a rotation matrix (Rº) is (R-8). (b) If the vectors V1, V2, ..., Vk are such that no two of these vectors are scalar multiples of each other then they must form a linearly independent set. (c) The set containing just the zero vector, {0}, is a subspace of R”. (d) If v, w E R3 then span(v, w) must...
3. [1 mark each] Determine which of the following statements are true and which are false. (a) The inverse of a rotation matrix (Rº) is (R-8). (b) If the vectors V1, V2, ..., Vk are such that no two of these vectors are scalar multiples of each other then they must form a linearly independent set. (c) The set containing just the zero vector, {0}, is a subspace of R”. (d) If v, w E R3 then span(v, w) must...
Find an ONB (orthonormal basis) for the following plane in R3 2 + y + 3z...
 Find an ONB (orthonormal basis) for the following plane in R3 2 + y + 3z = 0 First, solve the system, then assign parameters s and t to the free variables (in this order), and write the solution in vector form as su + tv. Now normalize u to have norm 1 and call it ū. Then find the component of v orthogonal to the line spanned by u and normalize it, call it ū. Below, enter the components...
Find an ONB (orthonormal basis) for the following plane in R3 2 + y + 3z = 0 First, solve the system, then assign parameters s and t to the free variables (in this order), and write the solution in vector form as su + tv. Now normalize u to have norm 1 and call it ū. Then find the component of v orthogonal to the line spanned by u and normalize it, call it ū. Below, enter the components...
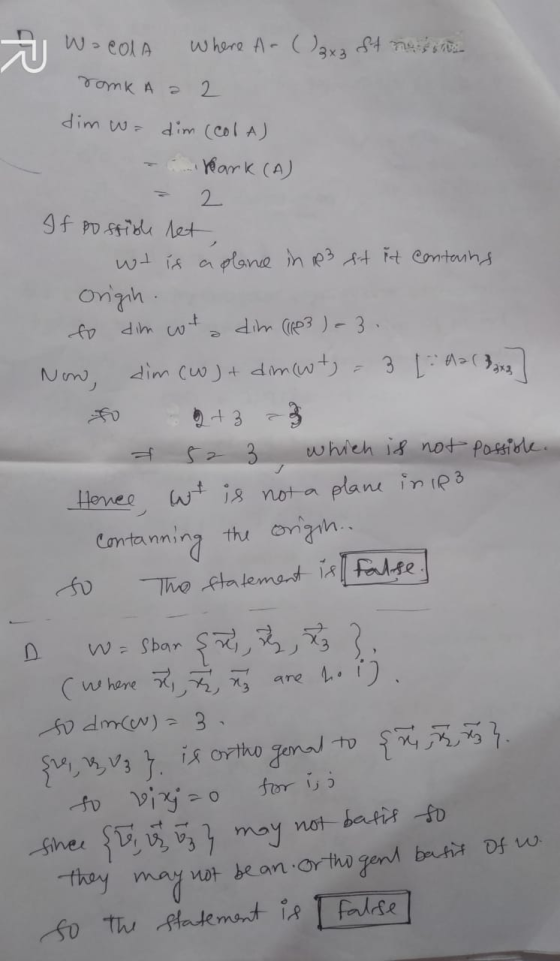
2. (a) Show that is an orthogonal basis for R3. (b) Find a non-zero vector v in the orthogonal co...
 2. (a) Show that is an orthogonal basis for R3. (b) Find a non-zero vector v in the orthogonal complement of the space 0 Span 2,2 Do not simply compute the cross product. (c) Let A be a 5 × 2 rnatrix with linearly independent columns. Using the rank-nullity theorem applied to AT, and any other results from the course, find the dinension of Col(A)
2. (a) Show that is an orthogonal basis for R3. (b) Find a non-zero vector...
2. (a) Show that is an orthogonal basis for R3. (b) Find a non-zero vector v in the orthogonal complement of the space 0 Span 2,2 Do not simply compute the cross product. (c) Let A be a 5 × 2 rnatrix with linearly independent columns. Using the rank-nullity theorem applied to AT, and any other results from the course, find the dinension of Col(A)
2. (a) Show that is an orthogonal basis for R3. (b) Find a non-zero vector...
1. True or False. Decide whether the following statements are true or false. Circle your answer...
 1. True or False. Decide whether the following statements are true or false. Circle your answer (no explanation needed). (a) (3 points) If ū1, víz, vz, ū are vectors for R“, and {vi, uz, uz} is lincarly independent, then {61, U2, U3, } is also lincarly independent. True False (b) (3 points) If ū is a vector in R™ and W is a subspace of R", and ū= projw (ū) is the closest point on W to ū, then i...
1. True or False. Decide whether the following statements are true or false. Circle your answer (no explanation needed). (a) (3 points) If ū1, víz, vz, ū are vectors for R“, and {vi, uz, uz} is lincarly independent, then {61, U2, U3, } is also lincarly independent. True False (b) (3 points) If ū is a vector in R™ and W is a subspace of R", and ū= projw (ū) is the closest point on W to ū, then i...
I am looking for how to explain #4 part b. I have gotten the matrix A...
 I am looking for how to explain #4 part b. I have gotten the
matrix A and I believe the answer is W = span{ v1 u2 u3 } however
I'm not really sure if that is correct or not. Please give a small
explanation. Also im not sure if I need to represent the vectors in
A as columns or rows, or if either one works.
For the next two problems, W is the subspace of R4 given by...
I am looking for how to explain #4 part b. I have gotten the
matrix A and I believe the answer is W = span{ v1 u2 u3 } however
I'm not really sure if that is correct or not. Please give a small
explanation. Also im not sure if I need to represent the vectors in
A as columns or rows, or if either one works.
For the next two problems, W is the subspace of R4 given by...
Given the matrix A = 1 0 −1 1 3 2 6 −1 0 7...
Given the matrix A = 1 0 −1 1 3 2 6 −1 0 7 −1 6 2 −3 −2 b) If W = span{[1,0,−1,1,3], [2,6,−1,0,7], [−1,6,2,−3,−2]}, find a basis for the orthogonal complement W⊥ of W. c) Construct an orthogonal basis for col(A) containing vector [1 2 −1] . d) Find the projection of the vector v =[−3 3 1] onto col(A). Please show all work and steps clearly so I can follow your logic and learn...
Please do only e and f and show work null(AT) null(A) T col(A) row(A) Figure 5.6 The four fundamental subspaces (f) Fin...
 Please do only e and f and show work
null(AT) null(A) T col(A) row(A) Figure 5.6 The four fundamental subspaces (f) Find bases for the four fundamental subspaces of 1 1 1 6 -1 0 1 -1 2 A= -2 3 1 -2 1 4 1 6 1 3 8. Given a subspace W of R", define the orthogonal complement of W to be W vE R u v 0 for every u E W (a) Let W span(e, e2)...
Please do only e and f and show work
null(AT) null(A) T col(A) row(A) Figure 5.6 The four fundamental subspaces (f) Find bases for the four fundamental subspaces of 1 1 1 6 -1 0 1 -1 2 A= -2 3 1 -2 1 4 1 6 1 3 8. Given a subspace W of R", define the orthogonal complement of W to be W vE R u v 0 for every u E W (a) Let W span(e, e2)...
 1-
2-
3-
1 (10 points) Show that {u1, U2, U3} is an orthogonal basis for R3. Then express x as a linear 3 4 combination of the u's. u -3 U2 = 0 ,u3 5 6 -2 2 -1 (10 points) Suppose a vector y is orthogonal to vectors u and v. Prove that y is orthogonal to the vector 4u - 3v. 10. (2 points each) True or False: ( ) Eigenvalues must be nonzero scalars. ( )...
1-
2-
3-
1 (10 points) Show that {u1, U2, U3} is an orthogonal basis for R3. Then express x as a linear 3 4 combination of the u's. u -3 U2 = 0 ,u3 5 6 -2 2 -1 (10 points) Suppose a vector y is orthogonal to vectors u and v. Prove that y is orthogonal to the vector 4u - 3v. 10. (2 points each) True or False: ( ) Eigenvalues must be nonzero scalars. ( )...
 1. (50 pts.) Let A be the 3 x 3 matrix A= 0 0 3 0 2 0 3 0 0 :) i. Compute the eigenvectors ū1, U2, U3 of A. ii. Verify that the matrix S with columns ū ū2, öz has full rank. iii. Use the Gram-Schmidt process to change B into an orthogonal matrix P.
1. (50 pts.) Let A be the 3 x 3 matrix A= 0 0 3 0 2 0 3 0 0 :) i. Compute the eigenvectors ū1, U2, U3 of A. ii. Verify that the matrix S with columns ū ū2, öz has full rank. iii. Use the Gram-Schmidt process to change B into an orthogonal matrix P.
 1 -1.2 5 Uį = U2 = -3 1, U3 = 2 , 14 = 29 ( 7 Answer the following questions and give proper explanations. (a) Is {ui, U2, uz} a basis for R3? (b) Is {ui, U2, u4} a basis for R4? (c) Is {ui, U2, U3, U4, u; } a basis for R? (d) Is {ui, U2, U3, u} a basis for Rº?! (e) Are ui, u, and O linearly independent?! Problem 6. (15 points). Let A...
1 -1.2 5 Uį = U2 = -3 1, U3 = 2 , 14 = 29 ( 7 Answer the following questions and give proper explanations. (a) Is {ui, U2, uz} a basis for R3? (b) Is {ui, U2, u4} a basis for R4? (c) Is {ui, U2, U3, U4, u; } a basis for R? (d) Is {ui, U2, U3, u} a basis for Rº?! (e) Are ui, u, and O linearly independent?! Problem 6. (15 points). Let A...
 3. [1 mark each] Determine which of the following statements are true and which are false. (a) The inverse of a rotation matrix (Rº) is (R-8). (b) If the vectors V1, V2, ..., Vk are such that no two of these vectors are scalar multiples of each other then they must form a linearly independent set. (c) The set containing just the zero vector, {0}, is a subspace of R”. (d) If v, w E R3 then span(v, w) must...
3. [1 mark each] Determine which of the following statements are true and which are false. (a) The inverse of a rotation matrix (Rº) is (R-8). (b) If the vectors V1, V2, ..., Vk are such that no two of these vectors are scalar multiples of each other then they must form a linearly independent set. (c) The set containing just the zero vector, {0}, is a subspace of R”. (d) If v, w E R3 then span(v, w) must...
 Find an ONB (orthonormal basis) for the following plane in R3 2 + y + 3z = 0 First, solve the system, then assign parameters s and t to the free variables (in this order), and write the solution in vector form as su + tv. Now normalize u to have norm 1 and call it ū. Then find the component of v orthogonal to the line spanned by u and normalize it, call it ū. Below, enter the components...
Find an ONB (orthonormal basis) for the following plane in R3 2 + y + 3z = 0 First, solve the system, then assign parameters s and t to the free variables (in this order), and write the solution in vector form as su + tv. Now normalize u to have norm 1 and call it ū. Then find the component of v orthogonal to the line spanned by u and normalize it, call it ū. Below, enter the components...
 2. (a) Show that is an orthogonal basis for R3. (b) Find a non-zero vector v in the orthogonal complement of the space 0 Span 2,2 Do not simply compute the cross product. (c) Let A be a 5 × 2 rnatrix with linearly independent columns. Using the rank-nullity theorem applied to AT, and any other results from the course, find the dinension of Col(A)
2. (a) Show that is an orthogonal basis for R3. (b) Find a non-zero vector...
2. (a) Show that is an orthogonal basis for R3. (b) Find a non-zero vector v in the orthogonal complement of the space 0 Span 2,2 Do not simply compute the cross product. (c) Let A be a 5 × 2 rnatrix with linearly independent columns. Using the rank-nullity theorem applied to AT, and any other results from the course, find the dinension of Col(A)
2. (a) Show that is an orthogonal basis for R3. (b) Find a non-zero vector...
 1. True or False. Decide whether the following statements are true or false. Circle your answer (no explanation needed). (a) (3 points) If ū1, víz, vz, ū are vectors for R“, and {vi, uz, uz} is lincarly independent, then {61, U2, U3, } is also lincarly independent. True False (b) (3 points) If ū is a vector in R™ and W is a subspace of R", and ū= projw (ū) is the closest point on W to ū, then i...
1. True or False. Decide whether the following statements are true or false. Circle your answer (no explanation needed). (a) (3 points) If ū1, víz, vz, ū are vectors for R“, and {vi, uz, uz} is lincarly independent, then {61, U2, U3, } is also lincarly independent. True False (b) (3 points) If ū is a vector in R™ and W is a subspace of R", and ū= projw (ū) is the closest point on W to ū, then i...
 I am looking for how to explain #4 part b. I have gotten the
matrix A and I believe the answer is W = span{ v1 u2 u3 } however
I'm not really sure if that is correct or not. Please give a small
explanation. Also im not sure if I need to represent the vectors in
A as columns or rows, or if either one works.
For the next two problems, W is the subspace of R4 given by...
I am looking for how to explain #4 part b. I have gotten the
matrix A and I believe the answer is W = span{ v1 u2 u3 } however
I'm not really sure if that is correct or not. Please give a small
explanation. Also im not sure if I need to represent the vectors in
A as columns or rows, or if either one works.
For the next two problems, W is the subspace of R4 given by...
 Please do only e and f and show work
null(AT) null(A) T col(A) row(A) Figure 5.6 The four fundamental subspaces (f) Find bases for the four fundamental subspaces of 1 1 1 6 -1 0 1 -1 2 A= -2 3 1 -2 1 4 1 6 1 3 8. Given a subspace W of R", define the orthogonal complement of W to be W vE R u v 0 for every u E W (a) Let W span(e, e2)...
Please do only e and f and show work
null(AT) null(A) T col(A) row(A) Figure 5.6 The four fundamental subspaces (f) Find bases for the four fundamental subspaces of 1 1 1 6 -1 0 1 -1 2 A= -2 3 1 -2 1 4 1 6 1 3 8. Given a subspace W of R", define the orthogonal complement of W to be W vE R u v 0 for every u E W (a) Let W span(e, e2)...
Most questions answered within 3 hours.
-
Blue Spruce Corp. owns equipment that cost $63,400 when
purchased on January 1, 2017. It has...
asked 1 minute from now -
A lottery exists where balls numbered 1 to 17 are placed in an
urn. To win,...
asked 1 hour ago -
Please explain steps:
An 80 kg swimmer steps off a platform 10 m above the water...
asked 1 hour ago -
26) Briefly describe, using words or simple diagrams, the
chemiosmotic theory for coupling oxidation to phosphorylation...
asked 3 hours ago -
Suppose that XX is a random variable with mean 16 and standard
deviation 5 . Also...
asked 3 hours ago -
Calculate the number density of argon gas at a temperature of
24C and a pressure of...
asked 7 hours ago -
Alternative
Classification
How to Estimate
Probabilities from Data? ( For continuous Attributes)
And How to generate...
asked 7 hours ago -
An explosion breaks a 20.0-kg object into three parts. The
object is initially moving at a...
asked 8 hours ago -
Calculate the approximate number of residues of Rubisco, which
is involved in carbon fixation in plants,...
asked 9 hours ago -
Other decisions about scientific claims can have a much broader
impact.ENERGYarrow-10x10.png, environment, health, security - all...
asked 9 hours ago -
I need to write a research paper and work cited about this
topic: The United States...
asked 10 hours ago -
Hello! I was wondering if I could have some help?
If the vapor pressure of carvone...
asked 10 hours ago