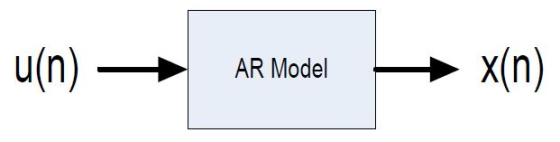
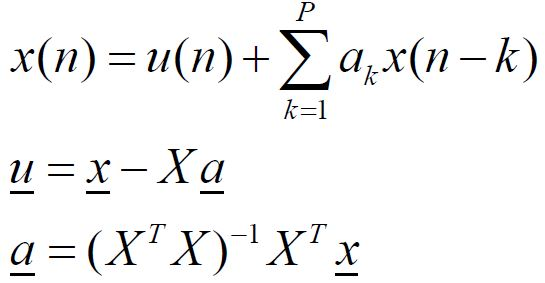
It is decided to use an AR model (a linear prediction model) of
an observed signal x(n) in order to estimate the
signal’s power spectral density. The model linear prediction
parameters will be determined using least squares
analysis, based on the equations:
1. In a particular experiment we observe x(n) = 1.0, 1.1, 1.2,
1.3, 1.4, 1.5, 1.6, 1.7, 1.8, 1.9 for n = 0, 1, 2, 3, 4,
5, 6, 7, 8, 9 respectively. Fill in specific numeric values for the
vector x and the matrix X in the above equations,
assuming that we want to use the available data (only the available
data described) to compute the coefficients
a for a linear prediction model with P = 4.

2. Assume that after correctly performing the least squares solution above, you get the result:
a = [ 1.2 -0.4 0.6 -0.2]
Write out the explicit Z-domain transfer function HAR(z) for the
above signal model, where X(z) = Har(z) U(z).
Be sure to include the specific numerical coefficients rather than
generic symbolic coefficients.
Har(z) =
3. It is desired to use the MATLAB freqz() function to estimate
the frequency response Har(w) of the filter in
the AR model, where w represents normalized frequency in radians.
This MATLAB function has the general
form:
[Har, w] = freqz(B, A, N);
Where B is a vector representing the numerator of Har(z), A is a
vector representing the denominator of Har(z),
and N is the number of points at which you want to evaluate Har(w)
(evenly spaced between w = 0 and the
Nyquist frequency w=pi). In the MATLAB result, Har is the vector of
computed frequency responses and w is
the corresponding vector of normalized frequencies. Fill in the
actual vector numeric values for the MATLAB
variables B and A, assuming the specific AR model solution in part
b above.
B =[ ] A=[ ]
4. It is desired to use the MATLAB filter() and var() functions
to estimate the variance of the AR model’s
hypothetical input function u(n) assuming the specific AR model
solution in part b above. These functions have
the general form:
u = filter(Bu, Au, x);
var_u = var(u);
Where Bu is a vector representing the numerator of Hu(z), and Au
is a vector representing the denominator of
Hu(z), where U(z) = Hu(z) X(z). Fill in the actual vector numeric
values for Bu and Au, assuming the AR model
solution in part b above.
Bu =[ ] Au =[ ]
5. It is desired to use the MATLAB semilogy()
function to display the estimate of the power spectral density
of
the observed signal x, based on the AR model formulated above. This
function has the general form:
semilogy(w, Pxx);
Where Pxx is a vector representing the power spectral density of
x estimated at the normalized frequencies in
the vector w. Complete the MATLAB expression to compute Pxx based
on Har and var_u as computed in parts
3. and 4. above.
Pxx =
Homework Answers




Add Answer to:
It is decided to use an AR model (a linear prediction model) of
an observed signal...
MARK WHICH STATEMENTS BELOW ARE TRUE, USING THE FOLLOWING, Consider Vf(x, y, z) in terms of...
 MARK WHICH STATEMENTS BELOW ARE TRUE, USING THE FOLLOWING, Consider Vf(x, y, z) in terms of a new coordinate system, x= x(u, v, w), y=y(u, v, w), z=z(u, v, w). Let r(s) = x(s) i+y(s) + z(s) k be the position vector defining some continuous path as a function of the arc length. Similarly for the other partial derivatives in v and w. For spherical coordinates the following must also be true for any points, x = Rsin o cose,...
MARK WHICH STATEMENTS BELOW ARE TRUE, USING THE FOLLOWING, Consider Vf(x, y, z) in terms of a new coordinate system, x= x(u, v, w), y=y(u, v, w), z=z(u, v, w). Let r(s) = x(s) i+y(s) + z(s) k be the position vector defining some continuous path as a function of the arc length. Similarly for the other partial derivatives in v and w. For spherical coordinates the following must also be true for any points, x = Rsin o cose,...
ar,a7, that V2u V.Vu 6.4. Verify directly from the gradient operator that V uK +uyy-see Definition...
 ar,a7, that V2u V.Vu 6.4. Verify directly from the gradient operator that V uK +uyy-see Definition 6.5 Definition 6.5 (Two-Dimensional Heat or Diffusion Equation). Consider the open do- main (x, y) W. Using the continuity equation (1.4) the flux rule (6.13) yields DV u+R (6.14) where V2u V.Vu u +uyy is the linear Laplacian operator The boundary conditions come in the three types: conditions on u, conditions on flux, and mixed as we are familiar with from Chapter 4. The...
ar,a7, that V2u V.Vu 6.4. Verify directly from the gradient operator that V uK +uyy-see Definition 6.5 Definition 6.5 (Two-Dimensional Heat or Diffusion Equation). Consider the open do- main (x, y) W. Using the continuity equation (1.4) the flux rule (6.13) yields DV u+R (6.14) where V2u V.Vu u +uyy is the linear Laplacian operator The boundary conditions come in the three types: conditions on u, conditions on flux, and mixed as we are familiar with from Chapter 4. The...
in a Bayesian view. Consider the prior π(a)-1 for all a e R Consider a Gaussian linear model Y = aX+ E Determine whether each of the following statements is true or false. π(a) a uniform prior. (1) (...
 in a Bayesian view. Consider the prior π(a)-1 for all a e R Consider a Gaussian linear model Y = aX+ E Determine whether each of the following statements is true or false. π(a) a uniform prior. (1) (a) True (b) False L(Y=y14=a,X=x) (2) π(a) is a jeffreys prior when we consider the likelihood (where we assume xis known) (a) True (b)False Y-XB+ σε where ε E R" is a random vector with Consider a linear regression model E[ε1-0, E[eErJ-1....
in a Bayesian view. Consider the prior π(a)-1 for all a e R Consider a Gaussian linear model Y = aX+ E Determine whether each of the following statements is true or false. π(a) a uniform prior. (1) (a) True (b) False L(Y=y14=a,X=x) (2) π(a) is a jeffreys prior when we consider the likelihood (where we assume xis known) (a) True (b)False Y-XB+ σε where ε E R" is a random vector with Consider a linear regression model E[ε1-0, E[eErJ-1....
ar,a7, that V2u V.Vu 6.4. Verify directly from the gradient operator that V uK +uyy-see Definition...
 ar,a7, that V2u V.Vu 6.4. Verify directly from the gradient operator that V uK +uyy-see Definition 6.5 Definition 6.5 (Two-Dimensional Heat or Diffusion Equation). Consider the open do- main (x, y) W. Using the continuity equation (1.4) the flux rule (6.13) yields DV u+R (6.14) where V2u V.Vu u +uyy is the linear Laplacian operator The boundary conditions come in the three types: conditions on u, conditions on flux, and mixed as we are familiar with from Chapter 4. The...
ar,a7, that V2u V.Vu 6.4. Verify directly from the gradient operator that V uK +uyy-see Definition 6.5 Definition 6.5 (Two-Dimensional Heat or Diffusion Equation). Consider the open do- main (x, y) W. Using the continuity equation (1.4) the flux rule (6.13) yields DV u+R (6.14) where V2u V.Vu u +uyy is the linear Laplacian operator The boundary conditions come in the three types: conditions on u, conditions on flux, and mixed as we are familiar with from Chapter 4. The...
Problem 3 (LrTrmations). (a) Give an example of a fuction R R such that: f(Ax)-Af(x), for...
 Problem 3 (LrTrmations). (a) Give an example of a fuction R R such that: f(Ax)-Af(x), for all x € R2,AG R, but is not a linear transformation. (b) Show that a linear transformation VWfrom a one dimensional vector space V is com- pletely determined by a scalar A (e) Let V-UUbe a direet sum of the vector subspaces U and Ug and, U2 be two linear transformations. Show that V → W defined by f(m + u2)-f1(ul) + f2(u2) is...
Problem 3 (LrTrmations). (a) Give an example of a fuction R R such that: f(Ax)-Af(x), for all x € R2,AG R, but is not a linear transformation. (b) Show that a linear transformation VWfrom a one dimensional vector space V is com- pletely determined by a scalar A (e) Let V-UUbe a direet sum of the vector subspaces U and Ug and, U2 be two linear transformations. Show that V → W defined by f(m + u2)-f1(ul) + f2(u2) is...
3. Use the fourier series in the previous problem as the input to the undamped spring-mass model ...
 previous
3. Use the fourier series in the previous problem as the input to the undamped spring-mass model у+w2y = f(t) and assume that wメnn/L for any n. Find ONLY the particular solution yp(t). Plot the transfer function -you will notice that this is a bandpass amplifier. 2. Assume that our function above is used to open-loop heat a pot of coffee sitting on a coffee maker burner (open-loop means that no attempt is made to hold the coffee at...
previous
3. Use the fourier series in the previous problem as the input to the undamped spring-mass model у+w2y = f(t) and assume that wメnn/L for any n. Find ONLY the particular solution yp(t). Plot the transfer function -you will notice that this is a bandpass amplifier. 2. Assume that our function above is used to open-loop heat a pot of coffee sitting on a coffee maker burner (open-loop means that no attempt is made to hold the coffee at...
A particle of mass m is bound by the spherically-symmetric three-dimensional harmonic- oscillator potential energy ,...
 A particle of mass m is bound by the spherically-symmetric three-dimensional harmonic- oscillator potential energy , and ф are the usual spherical coordinates. (a) In the form given above, why is it clear that the potential energy function V) is (b) For this problem, it will be more convenient to express this spherically-symmetric where r , spherically symmetric? A brief answer is sufficient. potential energy in Cartesian coordinates x, y, and z as physically the same potential energy as the...
A particle of mass m is bound by the spherically-symmetric three-dimensional harmonic- oscillator potential energy , and ф are the usual spherical coordinates. (a) In the form given above, why is it clear that the potential energy function V) is (b) For this problem, it will be more convenient to express this spherically-symmetric where r , spherically symmetric? A brief answer is sufficient. potential energy in Cartesian coordinates x, y, and z as physically the same potential energy as the...
The state space model of an interconnected three tank water storage system is given by the following equation -3 1 o 1[hi] dt The heights of water in the tanks are, respectively, hi, h2, hz. Each tan...
 The state space model of an interconnected three tank water storage system is given by the following equation -3 1 o 1[hi] dt The heights of water in the tanks are, respectively, hi, h2, hz. Each tank has an independent input flow; the volume flow rates of input water into the three tanks are, respectively, qii,qi2, Oi3. Each tank also has a water discharge outlet and the volume flow rates of water coming out of the tanks are, respectively, qo1,...
The state space model of an interconnected three tank water storage system is given by the following equation -3 1 o 1[hi] dt The heights of water in the tanks are, respectively, hi, h2, hz. Each tank has an independent input flow; the volume flow rates of input water into the three tanks are, respectively, qii,qi2, Oi3. Each tank also has a water discharge outlet and the volume flow rates of water coming out of the tanks are, respectively, qo1,...
The state space model of an interconnected three tank water storage system is given by the following equation: -3 1 0 1rh dt os lo 0 3] 10 1-3 The heights of water in the tanks are, respectively,...
 The state space model of an interconnected three tank water storage system is given by the following equation: -3 1 0 1rh dt os lo 0 3] 10 1-3 The heights of water in the tanks are, respectively, h,h2,h3. Each tank has an independent input flow; the volume flow rates of input water into the three tanks are, respectively, qǐ1,W2,4a. Each tank also has a water discharge outlet and the volume flow rates of water coming out of the tanks...
The state space model of an interconnected three tank water storage system is given by the following equation: -3 1 0 1rh dt os lo 0 3] 10 1-3 The heights of water in the tanks are, respectively, h,h2,h3. Each tank has an independent input flow; the volume flow rates of input water into the three tanks are, respectively, qǐ1,W2,4a. Each tank also has a water discharge outlet and the volume flow rates of water coming out of the tanks...
(a) (4 points) Fill in the blanks in the following MATLAB function M file trap so...
 (a) (4 points) Fill in the blanks in the following MATLAB function M file trap so that it implements the composilu trapezidul rulo, using a soquence of w -1,2, 4, 8, 16,... trapezoids, to approximatel d . This M file uses the MATLAB built-in function trapz. If 401) and y=() f(!)..... fr. 1)). 3= ($1, then the execution of z = trapz(x, y) approximates using the composite trapezoidal rule (with trapezoids). (Note that the entries of are labeled starting at...
(a) (4 points) Fill in the blanks in the following MATLAB function M file trap so that it implements the composilu trapezidul rulo, using a soquence of w -1,2, 4, 8, 16,... trapezoids, to approximatel d . This M file uses the MATLAB built-in function trapz. If 401) and y=() f(!)..... fr. 1)). 3= ($1, then the execution of z = trapz(x, y) approximates using the composite trapezoidal rule (with trapezoids). (Note that the entries of are labeled starting at...
 MARK WHICH STATEMENTS BELOW ARE TRUE, USING THE FOLLOWING, Consider Vf(x, y, z) in terms of a new coordinate system, x= x(u, v, w), y=y(u, v, w), z=z(u, v, w). Let r(s) = x(s) i+y(s) + z(s) k be the position vector defining some continuous path as a function of the arc length. Similarly for the other partial derivatives in v and w. For spherical coordinates the following must also be true for any points, x = Rsin o cose,...
MARK WHICH STATEMENTS BELOW ARE TRUE, USING THE FOLLOWING, Consider Vf(x, y, z) in terms of a new coordinate system, x= x(u, v, w), y=y(u, v, w), z=z(u, v, w). Let r(s) = x(s) i+y(s) + z(s) k be the position vector defining some continuous path as a function of the arc length. Similarly for the other partial derivatives in v and w. For spherical coordinates the following must also be true for any points, x = Rsin o cose,...
 ar,a7, that V2u V.Vu 6.4. Verify directly from the gradient operator that V uK +uyy-see Definition 6.5 Definition 6.5 (Two-Dimensional Heat or Diffusion Equation). Consider the open do- main (x, y) W. Using the continuity equation (1.4) the flux rule (6.13) yields DV u+R (6.14) where V2u V.Vu u +uyy is the linear Laplacian operator The boundary conditions come in the three types: conditions on u, conditions on flux, and mixed as we are familiar with from Chapter 4. The...
ar,a7, that V2u V.Vu 6.4. Verify directly from the gradient operator that V uK +uyy-see Definition 6.5 Definition 6.5 (Two-Dimensional Heat or Diffusion Equation). Consider the open do- main (x, y) W. Using the continuity equation (1.4) the flux rule (6.13) yields DV u+R (6.14) where V2u V.Vu u +uyy is the linear Laplacian operator The boundary conditions come in the three types: conditions on u, conditions on flux, and mixed as we are familiar with from Chapter 4. The...
 in a Bayesian view. Consider the prior π(a)-1 for all a e R Consider a Gaussian linear model Y = aX+ E Determine whether each of the following statements is true or false. π(a) a uniform prior. (1) (a) True (b) False L(Y=y14=a,X=x) (2) π(a) is a jeffreys prior when we consider the likelihood (where we assume xis known) (a) True (b)False Y-XB+ σε where ε E R" is a random vector with Consider a linear regression model E[ε1-0, E[eErJ-1....
in a Bayesian view. Consider the prior π(a)-1 for all a e R Consider a Gaussian linear model Y = aX+ E Determine whether each of the following statements is true or false. π(a) a uniform prior. (1) (a) True (b) False L(Y=y14=a,X=x) (2) π(a) is a jeffreys prior when we consider the likelihood (where we assume xis known) (a) True (b)False Y-XB+ σε where ε E R" is a random vector with Consider a linear regression model E[ε1-0, E[eErJ-1....
 ar,a7, that V2u V.Vu 6.4. Verify directly from the gradient operator that V uK +uyy-see Definition 6.5 Definition 6.5 (Two-Dimensional Heat or Diffusion Equation). Consider the open do- main (x, y) W. Using the continuity equation (1.4) the flux rule (6.13) yields DV u+R (6.14) where V2u V.Vu u +uyy is the linear Laplacian operator The boundary conditions come in the three types: conditions on u, conditions on flux, and mixed as we are familiar with from Chapter 4. The...
ar,a7, that V2u V.Vu 6.4. Verify directly from the gradient operator that V uK +uyy-see Definition 6.5 Definition 6.5 (Two-Dimensional Heat or Diffusion Equation). Consider the open do- main (x, y) W. Using the continuity equation (1.4) the flux rule (6.13) yields DV u+R (6.14) where V2u V.Vu u +uyy is the linear Laplacian operator The boundary conditions come in the three types: conditions on u, conditions on flux, and mixed as we are familiar with from Chapter 4. The...
 Problem 3 (LrTrmations). (a) Give an example of a fuction R R such that: f(Ax)-Af(x), for all x € R2,AG R, but is not a linear transformation. (b) Show that a linear transformation VWfrom a one dimensional vector space V is com- pletely determined by a scalar A (e) Let V-UUbe a direet sum of the vector subspaces U and Ug and, U2 be two linear transformations. Show that V → W defined by f(m + u2)-f1(ul) + f2(u2) is...
Problem 3 (LrTrmations). (a) Give an example of a fuction R R such that: f(Ax)-Af(x), for all x € R2,AG R, but is not a linear transformation. (b) Show that a linear transformation VWfrom a one dimensional vector space V is com- pletely determined by a scalar A (e) Let V-UUbe a direet sum of the vector subspaces U and Ug and, U2 be two linear transformations. Show that V → W defined by f(m + u2)-f1(ul) + f2(u2) is...
 previous
3. Use the fourier series in the previous problem as the input to the undamped spring-mass model у+w2y = f(t) and assume that wメnn/L for any n. Find ONLY the particular solution yp(t). Plot the transfer function -you will notice that this is a bandpass amplifier. 2. Assume that our function above is used to open-loop heat a pot of coffee sitting on a coffee maker burner (open-loop means that no attempt is made to hold the coffee at...
previous
3. Use the fourier series in the previous problem as the input to the undamped spring-mass model у+w2y = f(t) and assume that wメnn/L for any n. Find ONLY the particular solution yp(t). Plot the transfer function -you will notice that this is a bandpass amplifier. 2. Assume that our function above is used to open-loop heat a pot of coffee sitting on a coffee maker burner (open-loop means that no attempt is made to hold the coffee at...
 A particle of mass m is bound by the spherically-symmetric three-dimensional harmonic- oscillator potential energy , and ф are the usual spherical coordinates. (a) In the form given above, why is it clear that the potential energy function V) is (b) For this problem, it will be more convenient to express this spherically-symmetric where r , spherically symmetric? A brief answer is sufficient. potential energy in Cartesian coordinates x, y, and z as physically the same potential energy as the...
A particle of mass m is bound by the spherically-symmetric three-dimensional harmonic- oscillator potential energy , and ф are the usual spherical coordinates. (a) In the form given above, why is it clear that the potential energy function V) is (b) For this problem, it will be more convenient to express this spherically-symmetric where r , spherically symmetric? A brief answer is sufficient. potential energy in Cartesian coordinates x, y, and z as physically the same potential energy as the...
 The state space model of an interconnected three tank water storage system is given by the following equation -3 1 o 1[hi] dt The heights of water in the tanks are, respectively, hi, h2, hz. Each tank has an independent input flow; the volume flow rates of input water into the three tanks are, respectively, qii,qi2, Oi3. Each tank also has a water discharge outlet and the volume flow rates of water coming out of the tanks are, respectively, qo1,...
The state space model of an interconnected three tank water storage system is given by the following equation -3 1 o 1[hi] dt The heights of water in the tanks are, respectively, hi, h2, hz. Each tank has an independent input flow; the volume flow rates of input water into the three tanks are, respectively, qii,qi2, Oi3. Each tank also has a water discharge outlet and the volume flow rates of water coming out of the tanks are, respectively, qo1,...
 The state space model of an interconnected three tank water storage system is given by the following equation: -3 1 0 1rh dt os lo 0 3] 10 1-3 The heights of water in the tanks are, respectively, h,h2,h3. Each tank has an independent input flow; the volume flow rates of input water into the three tanks are, respectively, qǐ1,W2,4a. Each tank also has a water discharge outlet and the volume flow rates of water coming out of the tanks...
The state space model of an interconnected three tank water storage system is given by the following equation: -3 1 0 1rh dt os lo 0 3] 10 1-3 The heights of water in the tanks are, respectively, h,h2,h3. Each tank has an independent input flow; the volume flow rates of input water into the three tanks are, respectively, qǐ1,W2,4a. Each tank also has a water discharge outlet and the volume flow rates of water coming out of the tanks...
 (a) (4 points) Fill in the blanks in the following MATLAB function M file trap so that it implements the composilu trapezidul rulo, using a soquence of w -1,2, 4, 8, 16,... trapezoids, to approximatel d . This M file uses the MATLAB built-in function trapz. If 401) and y=() f(!)..... fr. 1)). 3= ($1, then the execution of z = trapz(x, y) approximates using the composite trapezoidal rule (with trapezoids). (Note that the entries of are labeled starting at...
(a) (4 points) Fill in the blanks in the following MATLAB function M file trap so that it implements the composilu trapezidul rulo, using a soquence of w -1,2, 4, 8, 16,... trapezoids, to approximatel d . This M file uses the MATLAB built-in function trapz. If 401) and y=() f(!)..... fr. 1)). 3= ($1, then the execution of z = trapz(x, y) approximates using the composite trapezoidal rule (with trapezoids). (Note that the entries of are labeled starting at...
Most questions answered within 3 hours.
-
Thoroughly discuss the various current and proposed solutions to
anthropogenic influences resulting in Global Climate Change....
asked 29 seconds from now -
BLOG EXERCISE: You are writing a weekly intranet blog for the
CEO of a large Canadian...
asked 2 minutes ago -
calculate ΔGrxn at 36 ∘C. N2O4(g)→2NO2(g)
asked 2 minutes ago -
Present and Future Values of Single Cash Flows for Different
Periods
Find the following values, using...
asked 5 minutes ago -
Which types of mutations in DNA can lead to the translation of a
non-functional protein product?...
asked 4 minutes ago -
Many structures are composed of individual elements that react
in unison when forces are applied. the...
asked 5 minutes ago -
Work of 1950 J is done by stirring a perfectly insulated beaker
containing 75 g of...
asked 35 minutes ago -
The neighborhood kids set up an outdoor lemonade stand in
Maryland in June. They find that...
asked 37 minutes ago -
9. A company has a beginning inventory of 4,000 units. The
company estimates it will sell...
asked 50 minutes ago -
A patient goes to the doctor's office with symptoms of a urinary
tract infection and provides...
asked 52 minutes ago -
When responding to the essay questions, be sure to cite any
material you obtained from a...
asked 52 minutes ago -
The energy of an electron in a 2.25-eV-deep potential well is
1.50 eV.At what distance into...
asked 54 minutes ago