
Homework Answers



Add Answer to:
A2. (a) Explain how the open-loop polar plot can be used to assess closed-loop stability by...
1- [a] For positive values of K, plot the root locus for a unity negative feedback...
 1- [a] For positive values of K, plot the root locus for a unity negative feedback control system having the following open-loop transfer function: K G(s)= (5 + 1)(8 + 4)(8 + 7) For what values of gain K does the system become unstable? Find also the value of k at which the damping ratio is 0.5 and the closed loop poles. (25%) [b] The characteristic equations of linear control systems are given below. Apply Routh-Hurwitz criterion to determine the...
1- [a] For positive values of K, plot the root locus for a unity negative feedback control system having the following open-loop transfer function: K G(s)= (5 + 1)(8 + 4)(8 + 7) For what values of gain K does the system become unstable? Find also the value of k at which the damping ratio is 0.5 and the closed loop poles. (25%) [b] The characteristic equations of linear control systems are given below. Apply Routh-Hurwitz criterion to determine the...
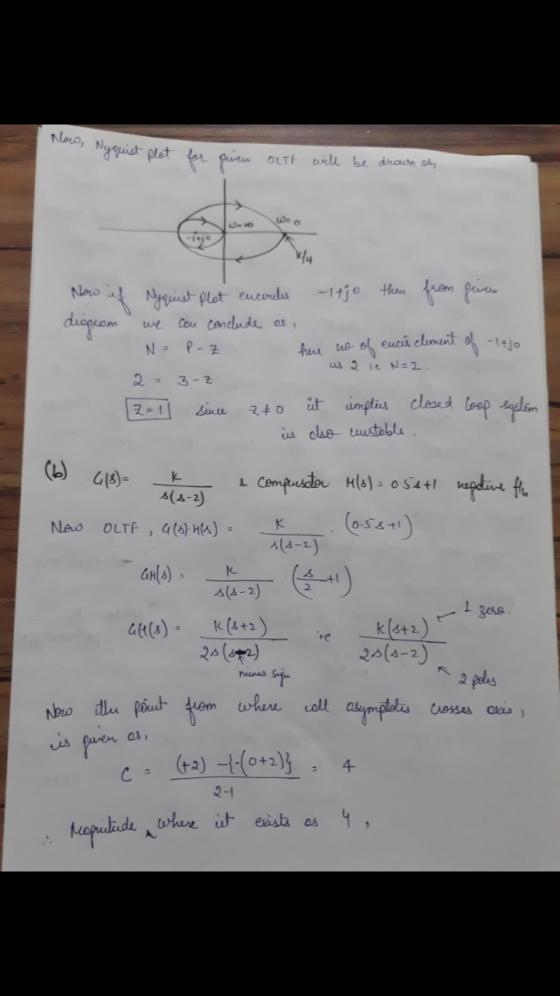
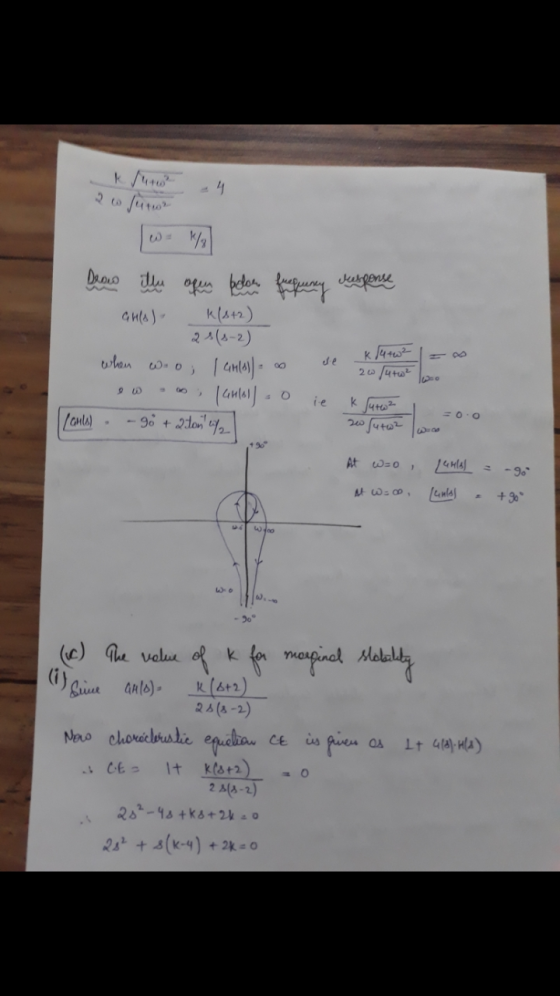
1. Given a unity feedback system with the open-loop transfer function s(0.5s +1) .design a lead c...
 1. Given a unity feedback system with the open-loop transfer function s(0.5s +1) .design a lead compensator ,0 〈 α 〈 1, such that the desired closed-loop poles at -2+2j following steps: J, by completing the (a) Find the angle deficiency from the compensator, (b)Find the zero and poles of the compensator (c) Find constant gain Kc.
1. Given a unity feedback system with the open-loop transfer function s(0.5s +1) .design a lead compensator ,0 〈 α 〈 1, such...
1. Given a unity feedback system with the open-loop transfer function s(0.5s +1) .design a lead compensator ,0 〈 α 〈 1, such that the desired closed-loop poles at -2+2j following steps: J, by completing the (a) Find the angle deficiency from the compensator, (b)Find the zero and poles of the compensator (c) Find constant gain Kc.
1. Given a unity feedback system with the open-loop transfer function s(0.5s +1) .design a lead compensator ,0 〈 α 〈 1, such...
Spring 2019 3. Given a closed-loop control system with unity feedback is shown in the block...
 Spring 2019 3. Given a closed-loop control system with unity feedback is shown in the block diagram. G(s) is the open-loop transfer function, and the controller is a gain, K. 1. (20) Calculate the open-loop transfer function tar →Q--t G(s) (10) Calculate the steady-state error to a step input of the open-loop system. 7. (in Bode Form) from the Bode plot. (10) Calculate the shortest possible settling time with a percentage overshoot of 5% or less. 8. 2. (10)Plot the...
Spring 2019 3. Given a closed-loop control system with unity feedback is shown in the block diagram. G(s) is the open-loop transfer function, and the controller is a gain, K. 1. (20) Calculate the open-loop transfer function tar →Q--t G(s) (10) Calculate the steady-state error to a step input of the open-loop system. 7. (in Bode Form) from the Bode plot. (10) Calculate the shortest possible settling time with a percentage overshoot of 5% or less. 8. 2. (10)Plot the...
A unity feedback control system has the following open loop transfer function, K L(s) .If K 10, evaluate the stability...
 A unity feedback control system has the following open loop transfer function, K L(s) .If K 10, evaluate the stability condition of the system using the s(s-1) Nyquist stability criterion.
A unity feedback control system has the following open loop transfer function, K L(s) .If K 10, evaluate the stability condition of the system using the s(s-1) Nyquist stability criterion.
A unity feedback control system has the following open loop transfer function, K L(s) .If K 10, evaluate the stability condition of the system using the s(s-1) Nyquist stability criterion.
A unity feedback control system has the following open loop transfer function, K L(s) .If K 10, evaluate the stability condition of the system using the s(s-1) Nyquist stability criterion.
2. Given a unity feedback system with open-loop transfer function s+40s-I) a) For K-1, derive the...
 2. Given a unity feedback system with open-loop transfer function s+40s-I) a) For K-1, derive the expressions for the real and imaginary parts of G(jo). b) What happen to the real and imaginary parts of G(jo) for ω 0 and for Are there values of ω that either the real or imaginary part goes to zero? If not, compute Gijo) for some ovalue, say,, or 2, to help you sketch the Polar plot of Gja). c) d) Use Matlab to...
2. Given a unity feedback system with open-loop transfer function s+40s-I) a) For K-1, derive the expressions for the real and imaginary parts of G(jo). b) What happen to the real and imaginary parts of G(jo) for ω 0 and for Are there values of ω that either the real or imaginary part goes to zero? If not, compute Gijo) for some ovalue, say,, or 2, to help you sketch the Polar plot of Gja). c) d) Use Matlab to...
Q1. Show analytically that the Root Locus for the unity feedback system with open loop transfer f...
 Q1. Show analytically that the Root Locus for the unity feedback system with open loop transfer function: (a) [10 marks] K(s 4) (s + 2) is a circle, and find the centre and the radius. Determine the minimum value of the damping ratio and the corresponding value of K (b) The root locus of the open loop transfer function: [10 marks] s(s26s +15) is depicted in Figure Q1(b). Find the minimum value of gain K that will render the system...
Q1. Show analytically that the Root Locus for the unity feedback system with open loop transfer function: (a) [10 marks] K(s 4) (s + 2) is a circle, and find the centre and the radius. Determine the minimum value of the damping ratio and the corresponding value of K (b) The root locus of the open loop transfer function: [10 marks] s(s26s +15) is depicted in Figure Q1(b). Find the minimum value of gain K that will render the system...
Consider the system shown as below. Draw a Bode diagram of the open-loop transfer function G(s).
 1 Consider the system shown as below. Draw a Bode diagram of the open-loop transfer function G(s). Determine the phase margin, gain-crossover frequency, gain margin and phase-crossover frequency, (Sketch the bode diagram by hand) 2 Consider the system shown as below. Use MATLAB to draw a bode diagram of the open-loop transfer function G(s). Show the gain-crossover frequency and phase-crossover frequency in the Bode diagram and determine the phase margin and gain margin. 3. Consider the system shown as below. Design a...
1 Consider the system shown as below. Draw a Bode diagram of the open-loop transfer function G(s). Determine the phase margin, gain-crossover frequency, gain margin and phase-crossover frequency, (Sketch the bode diagram by hand) 2 Consider the system shown as below. Use MATLAB to draw a bode diagram of the open-loop transfer function G(s). Show the gain-crossover frequency and phase-crossover frequency in the Bode diagram and determine the phase margin and gain margin. 3. Consider the system shown as below. Design a...
Theroot-locus design method (d) Gos)H(s)2) 5.5 Complex poles and zeros. For the systems with an open-loop transfer function given below, sketch the root locus plot. Find the asymptotes and their angle...
 Theroot-locus design method
(d) Gos)H(s)2) 5.5 Complex poles and zeros. For the systems with an open-loop transfer function given below, sketch the root locus plot. Find the asymptotes and their angles. the break-away or break-in points, the angle of arrival or departure for the complex poles and zeros, respectively, and the range of k for closed-loop stability 5 10ん k(s+21
(d) Gos)H(s)2) 5.5 Complex poles and zeros. For the systems with an open-loop transfer function given below, sketch the root...
Theroot-locus design method
(d) Gos)H(s)2) 5.5 Complex poles and zeros. For the systems with an open-loop transfer function given below, sketch the root locus plot. Find the asymptotes and their angles. the break-away or break-in points, the angle of arrival or departure for the complex poles and zeros, respectively, and the range of k for closed-loop stability 5 10ん k(s+21
(d) Gos)H(s)2) 5.5 Complex poles and zeros. For the systems with an open-loop transfer function given below, sketch the root...
(9) Draw a Nyquist plot of the following open-loop transfer function, and determine whether the closed-loop system is stable by using the Nyquist stability criterion. (12 points) Go)HG)(45+8)...
 (9) Draw a Nyquist plot of the following open-loop transfer function, and determine whether the closed-loop system is stable by using the Nyquist stability criterion. (12 points) Go)HG)(45+8)
(9) Draw a Nyquist plot of the following open-loop transfer function, and determine whether the closed-loop system is stable by using the Nyquist stability criterion. (12 points) Go)HG)(45+8)
(9) Draw a Nyquist plot of the following open-loop transfer function, and determine whether the closed-loop system is stable by using the Nyquist stability criterion. (12 points) Go)HG)(45+8)
(9) Draw a Nyquist plot of the following open-loop transfer function, and determine whether the closed-loop system is stable by using the Nyquist stability criterion. (12 points) Go)HG)(45+8)
EEL 4652 Control Systems 1 (Fall 2018) Homework 4 Nyquist Stability Criterion + Frequency Domain Design...
 EEL 4652 Control Systems 1 (Fall 2018) Homework 4 Nyquist Stability Criterion + Frequency Domain Design Problem 1: Nyquist Plots and Closed-Loop Stability A unity feedback closed-loop system has a forward transfer function of KG(s). Sketch the Nyquist plot for each of the G(s) cases listed below, and then find if the closed loop system is stable and if not - how many RHP closed loop poles there are. Find it for all the relevant ranges of K for -o0SKo,...
EEL 4652 Control Systems 1 (Fall 2018) Homework 4 Nyquist Stability Criterion + Frequency Domain Design Problem 1: Nyquist Plots and Closed-Loop Stability A unity feedback closed-loop system has a forward transfer function of KG(s). Sketch the Nyquist plot for each of the G(s) cases listed below, and then find if the closed loop system is stable and if not - how many RHP closed loop poles there are. Find it for all the relevant ranges of K for -o0SKo,...
 1- [a] For positive values of K, plot the root locus for a unity negative feedback control system having the following open-loop transfer function: K G(s)= (5 + 1)(8 + 4)(8 + 7) For what values of gain K does the system become unstable? Find also the value of k at which the damping ratio is 0.5 and the closed loop poles. (25%) [b] The characteristic equations of linear control systems are given below. Apply Routh-Hurwitz criterion to determine the...
1- [a] For positive values of K, plot the root locus for a unity negative feedback control system having the following open-loop transfer function: K G(s)= (5 + 1)(8 + 4)(8 + 7) For what values of gain K does the system become unstable? Find also the value of k at which the damping ratio is 0.5 and the closed loop poles. (25%) [b] The characteristic equations of linear control systems are given below. Apply Routh-Hurwitz criterion to determine the...
 1. Given a unity feedback system with the open-loop transfer function s(0.5s +1) .design a lead compensator ,0 〈 α 〈 1, such that the desired closed-loop poles at -2+2j following steps: J, by completing the (a) Find the angle deficiency from the compensator, (b)Find the zero and poles of the compensator (c) Find constant gain Kc.
1. Given a unity feedback system with the open-loop transfer function s(0.5s +1) .design a lead compensator ,0 〈 α 〈 1, such...
1. Given a unity feedback system with the open-loop transfer function s(0.5s +1) .design a lead compensator ,0 〈 α 〈 1, such that the desired closed-loop poles at -2+2j following steps: J, by completing the (a) Find the angle deficiency from the compensator, (b)Find the zero and poles of the compensator (c) Find constant gain Kc.
1. Given a unity feedback system with the open-loop transfer function s(0.5s +1) .design a lead compensator ,0 〈 α 〈 1, such...
 Spring 2019 3. Given a closed-loop control system with unity feedback is shown in the block diagram. G(s) is the open-loop transfer function, and the controller is a gain, K. 1. (20) Calculate the open-loop transfer function tar →Q--t G(s) (10) Calculate the steady-state error to a step input of the open-loop system. 7. (in Bode Form) from the Bode plot. (10) Calculate the shortest possible settling time with a percentage overshoot of 5% or less. 8. 2. (10)Plot the...
Spring 2019 3. Given a closed-loop control system with unity feedback is shown in the block diagram. G(s) is the open-loop transfer function, and the controller is a gain, K. 1. (20) Calculate the open-loop transfer function tar →Q--t G(s) (10) Calculate the steady-state error to a step input of the open-loop system. 7. (in Bode Form) from the Bode plot. (10) Calculate the shortest possible settling time with a percentage overshoot of 5% or less. 8. 2. (10)Plot the...
 A unity feedback control system has the following open loop transfer function, K L(s) .If K 10, evaluate the stability condition of the system using the s(s-1) Nyquist stability criterion.
A unity feedback control system has the following open loop transfer function, K L(s) .If K 10, evaluate the stability condition of the system using the s(s-1) Nyquist stability criterion.
A unity feedback control system has the following open loop transfer function, K L(s) .If K 10, evaluate the stability condition of the system using the s(s-1) Nyquist stability criterion.
A unity feedback control system has the following open loop transfer function, K L(s) .If K 10, evaluate the stability condition of the system using the s(s-1) Nyquist stability criterion.
 2. Given a unity feedback system with open-loop transfer function s+40s-I) a) For K-1, derive the expressions for the real and imaginary parts of G(jo). b) What happen to the real and imaginary parts of G(jo) for ω 0 and for Are there values of ω that either the real or imaginary part goes to zero? If not, compute Gijo) for some ovalue, say,, or 2, to help you sketch the Polar plot of Gja). c) d) Use Matlab to...
2. Given a unity feedback system with open-loop transfer function s+40s-I) a) For K-1, derive the expressions for the real and imaginary parts of G(jo). b) What happen to the real and imaginary parts of G(jo) for ω 0 and for Are there values of ω that either the real or imaginary part goes to zero? If not, compute Gijo) for some ovalue, say,, or 2, to help you sketch the Polar plot of Gja). c) d) Use Matlab to...
 Q1. Show analytically that the Root Locus for the unity feedback system with open loop transfer function: (a) [10 marks] K(s 4) (s + 2) is a circle, and find the centre and the radius. Determine the minimum value of the damping ratio and the corresponding value of K (b) The root locus of the open loop transfer function: [10 marks] s(s26s +15) is depicted in Figure Q1(b). Find the minimum value of gain K that will render the system...
Q1. Show analytically that the Root Locus for the unity feedback system with open loop transfer function: (a) [10 marks] K(s 4) (s + 2) is a circle, and find the centre and the radius. Determine the minimum value of the damping ratio and the corresponding value of K (b) The root locus of the open loop transfer function: [10 marks] s(s26s +15) is depicted in Figure Q1(b). Find the minimum value of gain K that will render the system...
 Theroot-locus design method
(d) Gos)H(s)2) 5.5 Complex poles and zeros. For the systems with an open-loop transfer function given below, sketch the root locus plot. Find the asymptotes and their angles. the break-away or break-in points, the angle of arrival or departure for the complex poles and zeros, respectively, and the range of k for closed-loop stability 5 10ん k(s+21
(d) Gos)H(s)2) 5.5 Complex poles and zeros. For the systems with an open-loop transfer function given below, sketch the root...
Theroot-locus design method
(d) Gos)H(s)2) 5.5 Complex poles and zeros. For the systems with an open-loop transfer function given below, sketch the root locus plot. Find the asymptotes and their angles. the break-away or break-in points, the angle of arrival or departure for the complex poles and zeros, respectively, and the range of k for closed-loop stability 5 10ん k(s+21
(d) Gos)H(s)2) 5.5 Complex poles and zeros. For the systems with an open-loop transfer function given below, sketch the root...
 (9) Draw a Nyquist plot of the following open-loop transfer function, and determine whether the closed-loop system is stable by using the Nyquist stability criterion. (12 points) Go)HG)(45+8)
(9) Draw a Nyquist plot of the following open-loop transfer function, and determine whether the closed-loop system is stable by using the Nyquist stability criterion. (12 points) Go)HG)(45+8)
(9) Draw a Nyquist plot of the following open-loop transfer function, and determine whether the closed-loop system is stable by using the Nyquist stability criterion. (12 points) Go)HG)(45+8)
(9) Draw a Nyquist plot of the following open-loop transfer function, and determine whether the closed-loop system is stable by using the Nyquist stability criterion. (12 points) Go)HG)(45+8)
 EEL 4652 Control Systems 1 (Fall 2018) Homework 4 Nyquist Stability Criterion + Frequency Domain Design Problem 1: Nyquist Plots and Closed-Loop Stability A unity feedback closed-loop system has a forward transfer function of KG(s). Sketch the Nyquist plot for each of the G(s) cases listed below, and then find if the closed loop system is stable and if not - how many RHP closed loop poles there are. Find it for all the relevant ranges of K for -o0SKo,...
EEL 4652 Control Systems 1 (Fall 2018) Homework 4 Nyquist Stability Criterion + Frequency Domain Design Problem 1: Nyquist Plots and Closed-Loop Stability A unity feedback closed-loop system has a forward transfer function of KG(s). Sketch the Nyquist plot for each of the G(s) cases listed below, and then find if the closed loop system is stable and if not - how many RHP closed loop poles there are. Find it for all the relevant ranges of K for -o0SKo,...
Most questions answered within 3 hours.
-
An MNE is this kind of industry when competition in one country
is essentially independent of...
asked 50 minutes ago -
. For this set of questions, determine what
proportion of a normal distribution is located betweeneach...
asked 1 hour ago -
A college student is employed as a door-to-door newspaper
salesman. Historical data suggests that the student...
asked 2 hours ago -
MATLAB HW 11 problem using Switch Case and Input commands
Write a script file that calculates...
asked 2 hours ago -
Considering gravitational time dilation, calculate the time that
passes in Earth’s surface while 1 hour passes...
asked 2 hours ago -
Minitab Problem: Take the Lake Hume June rainfall data and find
use the processes outlined in...
asked 3 hours ago -
X Company is trying to decide whether to continue using old
equipment to make Product A...
asked 3 hours ago -
IN PYTHON ONLY !! Program 2: Re-work
program #5 (WeeklyHours) from the previous assignment such that...
asked 4 hours ago -
The average length of time between arrivals at a turnpike
toll-booth is 26 seconds. What is...
asked 5 hours ago -
(a) A piston at 6.1 atm contains a gas that occupies a volume of
3.5 L....
asked 7 hours ago -
Please answer true or false. Words
cannot be changed or added in to make it true...
asked 7 hours ago -
An empty test tube weighs 15.923 grams. Then,
MgCl2•6H2O is added into the test tube. After...
asked 7 hours ago