
Homework Answers


Add Answer to:
2. Consider the causal LTI system in which the input x(t) and output y(t) are related...
The input x(t) and output y(t) of a causal LTI system are related through the block-diagram...
 The input x(t) and output y(t) of a causal LTI system are related through the block-diagram representation shown in Figure P 9.35. Determine a differential equation relating y(t) and x(t). is this system stable?
The input x(t) and output y(t) of a causal LTI system are related through the block-diagram representation shown in Figure P 9.35. Determine a differential equation relating y(t) and x(t). is this system stable?
4. Block Diagrams (a) Consider a causal LTI system with transfer function Show the direct-form block diagram of Hi(s) b) Consider a causal LTI system with transfer function H282+4s -6 H (s) = 2 Show...
 4. Block Diagrams (a) Consider a causal LTI system with transfer function Show the direct-form block diagram of Hi(s) b) Consider a causal LTI system with transfer function H282+4s -6 H (s) = 2 Show the direct-form block diagram of Hi(s) (c) Now observe that to draw a block diagram as a cascaded combination of two 1st order subsystems. (d) Finally, use partial fraction expansion to express this system as a sum of individual poles and observe that you can...
4. Block Diagrams (a) Consider a causal LTI system with transfer function Show the direct-form block diagram of Hi(s) b) Consider a causal LTI system with transfer function H282+4s -6 H (s) = 2 Show the direct-form block diagram of Hi(s) (c) Now observe that to draw a block diagram as a cascaded combination of two 1st order subsystems. (d) Finally, use partial fraction expansion to express this system as a sum of individual poles and observe that you can...
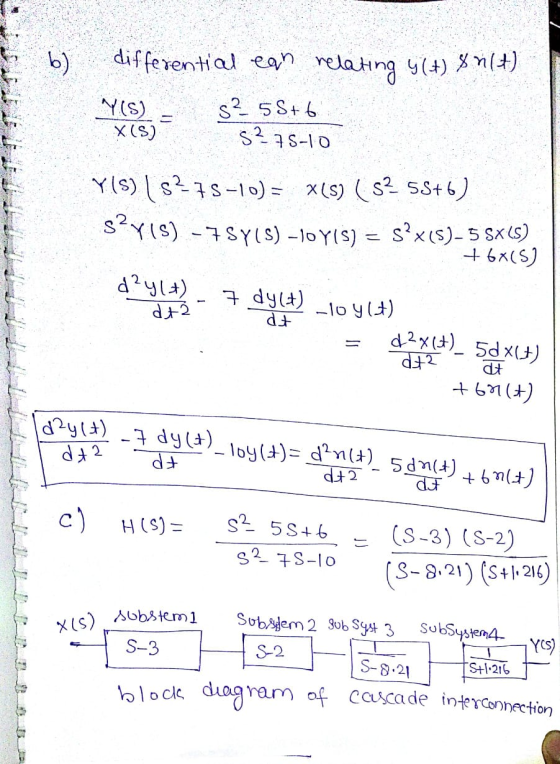
4. Block Diagrams (a) Consider a causal LTI system with transfer function H(s)2 Show the direct-form block diagram of Hi(s) (b) Consider a causal LTI system with transfer function 2s2 +4s -6 H(s)- Sh...
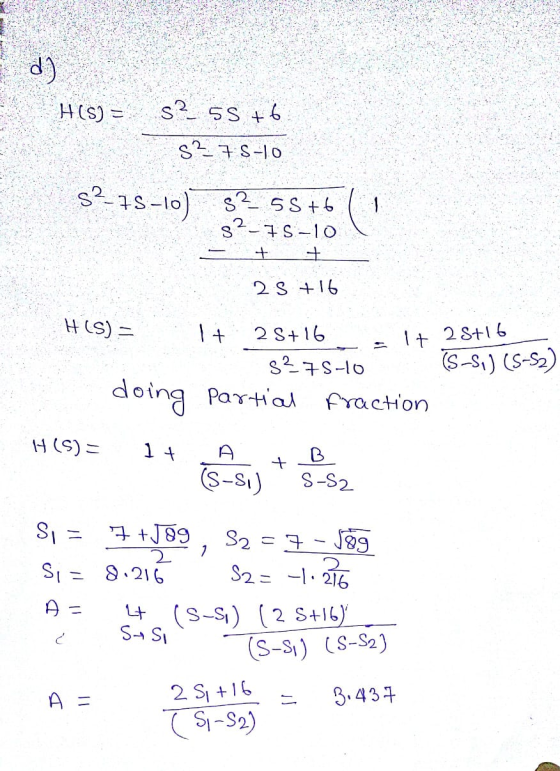
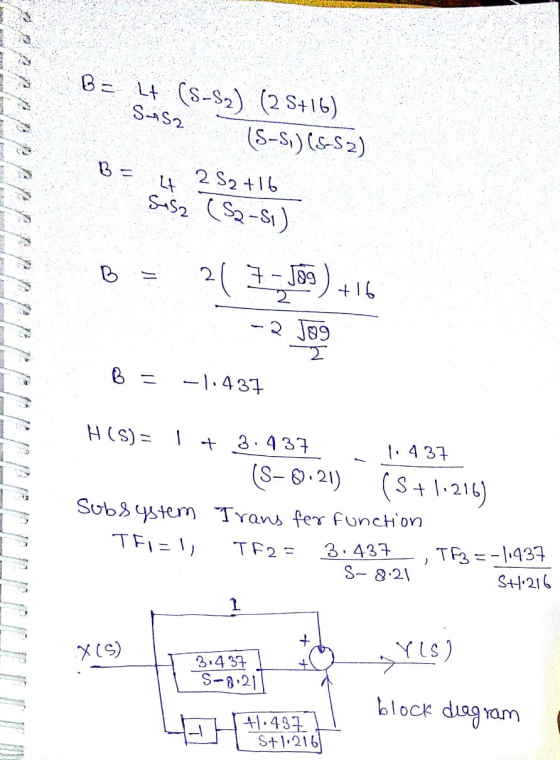
 4. Block Diagrams (a) Consider a causal LTI system with transfer function H(s)2 Show the direct-form block diagram of Hi(s) (b) Consider a causal LTI system with transfer function 2s2 +4s -6 H(s)- Show the direct-form block diagram of Hi(s) c) Now observe that to draw a block diagram as a cascaded combination of two 1st order subsystems. d) Finally, use partial fraction expansion to express this system as a sum of individual poles and observe that you can draw...
4. Block Diagrams (a) Consider a causal LTI system with transfer function H(s)2 Show the direct-form block diagram of Hi(s) (b) Consider a causal LTI system with transfer function 2s2 +4s -6 H(s)- Show the direct-form block diagram of Hi(s) c) Now observe that to draw a block diagram as a cascaded combination of two 1st order subsystems. d) Finally, use partial fraction expansion to express this system as a sum of individual poles and observe that you can draw...
Problem 3. The input and the output of a stable and causal LTI system are related...
 Problem 3. The input and the output of a stable and causal LTI system are related by the differential equation dy ) + 64x2 + 8y(t) = 2x(t) dt2 dt i) Find the frequency response of the system H(jw) [2 marks] ii) Using your result in (i) find the impulse response of the system h(t). [3 marks] iii) Find the transfer function of the system H(s), i.e. the Laplace transform of the impulse response [2 marks] iv) Sketch the pole-zero...
Problem 3. The input and the output of a stable and causal LTI system are related by the differential equation dy ) + 64x2 + 8y(t) = 2x(t) dt2 dt i) Find the frequency response of the system H(jw) [2 marks] ii) Using your result in (i) find the impulse response of the system h(t). [3 marks] iii) Find the transfer function of the system H(s), i.e. the Laplace transform of the impulse response [2 marks] iv) Sketch the pole-zero...
please show steps 4. (25 points) Laplace and LCCDE Systems Consider an LTI system with input-output...
 please show steps
4. (25 points) Laplace and LCCDE Systems Consider an LTI system with input-output relation described by the LCCDE: -2y(t) - y0) + 3x(t) + deco (O) = (a) (5 pts) Find the transfer function H(s) and write it in factored form. (b) (5 pt) Sketch the ROC corresponding to H(s) if it is known the system is causal. Mark the poles and zeros. (c) (5 pts) Sketch the ROC corresponding to H(s) if it is known the...
please show steps
4. (25 points) Laplace and LCCDE Systems Consider an LTI system with input-output relation described by the LCCDE: -2y(t) - y0) + 3x(t) + deco (O) = (a) (5 pts) Find the transfer function H(s) and write it in factored form. (b) (5 pt) Sketch the ROC corresponding to H(s) if it is known the system is causal. Mark the poles and zeros. (c) (5 pts) Sketch the ROC corresponding to H(s) if it is known the...
2.6.1 Consider a causal continuous-time LTI system described by the differential equation u"(t) +...
 2.6.1-2.6.62.6.1 Consider a causal contimuous-time LTI system described by the differential equation$$ y^{\prime \prime}(t)+y(t)=x(t) $$(a) Find the transfer function \(H(s)\), its \(R O C\), and its poles.(b) Find the impulse response \(h(t)\).(c) Classify the system as stable/unstable.(d) Find the step response of the system.2.6.2 Given the impulse response of a continuous-time LTI system, find the transfer function \(H(s),\) the \(\mathrm{ROC}\) of \(H(s)\), and the poles of the system. Also find the differential equation describing each system.(a) \(h(t)=\sin (3 t) u(t)\)(b)...
2.6.1-2.6.62.6.1 Consider a causal contimuous-time LTI system described by the differential equation$$ y^{\prime \prime}(t)+y(t)=x(t) $$(a) Find the transfer function \(H(s)\), its \(R O C\), and its poles.(b) Find the impulse response \(h(t)\).(c) Classify the system as stable/unstable.(d) Find the step response of the system.2.6.2 Given the impulse response of a continuous-time LTI system, find the transfer function \(H(s),\) the \(\mathrm{ROC}\) of \(H(s)\), and the poles of the system. Also find the differential equation describing each system.(a) \(h(t)=\sin (3 t) u(t)\)(b)...
Q8) Consider the following causal linear time-invariant (LTI) discrete-time filter with input x[n...
 Q8) Consider the following causal linear time-invariant (LTI) discrete-time filter with input x[n] and output y[n] described by bx[n-21- ax[n-3 for n 2 0, where a and b are real-valued positive coefficients. A) Is this a finite impulse response (FIR) or infinite impulse response (IIR) filter? Why? B) What are the initial conditions and their values? Why? C) Draw the block diagram of the filter relating input x[n] and output y[n] D) Derive a formula for the transfer function in...
Q8) Consider the following causal linear time-invariant (LTI) discrete-time filter with input x[n] and output y[n] described by bx[n-21- ax[n-3 for n 2 0, where a and b are real-valued positive coefficients. A) Is this a finite impulse response (FIR) or infinite impulse response (IIR) filter? Why? B) What are the initial conditions and their values? Why? C) Draw the block diagram of the filter relating input x[n] and output y[n] D) Derive a formula for the transfer function in...
Consider an LTI system whose input x[n] and output y[n] are related by the difference equation...
 Consider an LTI system whose input x[n] and output y[n] are related by the difference equation y[n – 1] + 3 y[n] + $y[n + 1] = x[n]. Determine the three possible choices for the impulse response that makes this system 1) causal, 2) two-sided and 3) anti-causal. Then for each case, determine if the system is stable or not. Causality Impulse Response Stability Causal Unstable v two-sided Unstable anti-Causal Unstable y In your answers, enter z(n) for a discrete-time...
Consider an LTI system whose input x[n] and output y[n] are related by the difference equation y[n – 1] + 3 y[n] + $y[n + 1] = x[n]. Determine the three possible choices for the impulse response that makes this system 1) causal, 2) two-sided and 3) anti-causal. Then for each case, determine if the system is stable or not. Causality Impulse Response Stability Causal Unstable v two-sided Unstable anti-Causal Unstable y In your answers, enter z(n) for a discrete-time...
discrete time signals and systems causal LTI system has the block diagram: (a) find a difference...
 discrete time signals and systems
causal LTI system has the block diagram:
(a) find a difference equation relating y[n] and x[n]
(b) determine if the system is stable
// هبه ۸[u] [u]x
discrete time signals and systems
causal LTI system has the block diagram:
(a) find a difference equation relating y[n] and x[n]
(b) determine if the system is stable
// هبه ۸[u] [u]x
(2) Consider the causal discrete-time LTI system with an input r (n) and an output y(n)...
 (2) Consider the causal discrete-time LTI system with an input r (n) and an output y(n) as shown in Figure 1, where K 6 (constant), system #1 is described by its impulse response: h(n) = -36(n) + 0.48(n- 1)+8.26(n-2), and system # 2 has the difference equation given by: y(n)+0.1y(n-1)+0.3y(n-2)- 2a(n). (a) Determine the corresponding difference equation of the system #1. Hence, write its fre- quency response. (b) Find the frequency response of system #2. 1 system #1 system #2...
(2) Consider the causal discrete-time LTI system with an input r (n) and an output y(n) as shown in Figure 1, where K 6 (constant), system #1 is described by its impulse response: h(n) = -36(n) + 0.48(n- 1)+8.26(n-2), and system # 2 has the difference equation given by: y(n)+0.1y(n-1)+0.3y(n-2)- 2a(n). (a) Determine the corresponding difference equation of the system #1. Hence, write its fre- quency response. (b) Find the frequency response of system #2. 1 system #1 system #2...
 The input x(t) and output y(t) of a causal LTI system are related through the block-diagram representation shown in Figure P 9.35. Determine a differential equation relating y(t) and x(t). is this system stable?
The input x(t) and output y(t) of a causal LTI system are related through the block-diagram representation shown in Figure P 9.35. Determine a differential equation relating y(t) and x(t). is this system stable?
 4. Block Diagrams (a) Consider a causal LTI system with transfer function Show the direct-form block diagram of Hi(s) b) Consider a causal LTI system with transfer function H282+4s -6 H (s) = 2 Show the direct-form block diagram of Hi(s) (c) Now observe that to draw a block diagram as a cascaded combination of two 1st order subsystems. (d) Finally, use partial fraction expansion to express this system as a sum of individual poles and observe that you can...
4. Block Diagrams (a) Consider a causal LTI system with transfer function Show the direct-form block diagram of Hi(s) b) Consider a causal LTI system with transfer function H282+4s -6 H (s) = 2 Show the direct-form block diagram of Hi(s) (c) Now observe that to draw a block diagram as a cascaded combination of two 1st order subsystems. (d) Finally, use partial fraction expansion to express this system as a sum of individual poles and observe that you can...
 4. Block Diagrams (a) Consider a causal LTI system with transfer function H(s)2 Show the direct-form block diagram of Hi(s) (b) Consider a causal LTI system with transfer function 2s2 +4s -6 H(s)- Show the direct-form block diagram of Hi(s) c) Now observe that to draw a block diagram as a cascaded combination of two 1st order subsystems. d) Finally, use partial fraction expansion to express this system as a sum of individual poles and observe that you can draw...
4. Block Diagrams (a) Consider a causal LTI system with transfer function H(s)2 Show the direct-form block diagram of Hi(s) (b) Consider a causal LTI system with transfer function 2s2 +4s -6 H(s)- Show the direct-form block diagram of Hi(s) c) Now observe that to draw a block diagram as a cascaded combination of two 1st order subsystems. d) Finally, use partial fraction expansion to express this system as a sum of individual poles and observe that you can draw...
 Problem 3. The input and the output of a stable and causal LTI system are related by the differential equation dy ) + 64x2 + 8y(t) = 2x(t) dt2 dt i) Find the frequency response of the system H(jw) [2 marks] ii) Using your result in (i) find the impulse response of the system h(t). [3 marks] iii) Find the transfer function of the system H(s), i.e. the Laplace transform of the impulse response [2 marks] iv) Sketch the pole-zero...
Problem 3. The input and the output of a stable and causal LTI system are related by the differential equation dy ) + 64x2 + 8y(t) = 2x(t) dt2 dt i) Find the frequency response of the system H(jw) [2 marks] ii) Using your result in (i) find the impulse response of the system h(t). [3 marks] iii) Find the transfer function of the system H(s), i.e. the Laplace transform of the impulse response [2 marks] iv) Sketch the pole-zero...
 please show steps
4. (25 points) Laplace and LCCDE Systems Consider an LTI system with input-output relation described by the LCCDE: -2y(t) - y0) + 3x(t) + deco (O) = (a) (5 pts) Find the transfer function H(s) and write it in factored form. (b) (5 pt) Sketch the ROC corresponding to H(s) if it is known the system is causal. Mark the poles and zeros. (c) (5 pts) Sketch the ROC corresponding to H(s) if it is known the...
please show steps
4. (25 points) Laplace and LCCDE Systems Consider an LTI system with input-output relation described by the LCCDE: -2y(t) - y0) + 3x(t) + deco (O) = (a) (5 pts) Find the transfer function H(s) and write it in factored form. (b) (5 pt) Sketch the ROC corresponding to H(s) if it is known the system is causal. Mark the poles and zeros. (c) (5 pts) Sketch the ROC corresponding to H(s) if it is known the...
 2.6.1-2.6.62.6.1 Consider a causal contimuous-time LTI system described by the differential equation$$ y^{\prime \prime}(t)+y(t)=x(t) $$(a) Find the transfer function \(H(s)\), its \(R O C\), and its poles.(b) Find the impulse response \(h(t)\).(c) Classify the system as stable/unstable.(d) Find the step response of the system.2.6.2 Given the impulse response of a continuous-time LTI system, find the transfer function \(H(s),\) the \(\mathrm{ROC}\) of \(H(s)\), and the poles of the system. Also find the differential equation describing each system.(a) \(h(t)=\sin (3 t) u(t)\)(b)...
2.6.1-2.6.62.6.1 Consider a causal contimuous-time LTI system described by the differential equation$$ y^{\prime \prime}(t)+y(t)=x(t) $$(a) Find the transfer function \(H(s)\), its \(R O C\), and its poles.(b) Find the impulse response \(h(t)\).(c) Classify the system as stable/unstable.(d) Find the step response of the system.2.6.2 Given the impulse response of a continuous-time LTI system, find the transfer function \(H(s),\) the \(\mathrm{ROC}\) of \(H(s)\), and the poles of the system. Also find the differential equation describing each system.(a) \(h(t)=\sin (3 t) u(t)\)(b)...
 Q8) Consider the following causal linear time-invariant (LTI) discrete-time filter with input x[n] and output y[n] described by bx[n-21- ax[n-3 for n 2 0, where a and b are real-valued positive coefficients. A) Is this a finite impulse response (FIR) or infinite impulse response (IIR) filter? Why? B) What are the initial conditions and their values? Why? C) Draw the block diagram of the filter relating input x[n] and output y[n] D) Derive a formula for the transfer function in...
Q8) Consider the following causal linear time-invariant (LTI) discrete-time filter with input x[n] and output y[n] described by bx[n-21- ax[n-3 for n 2 0, where a and b are real-valued positive coefficients. A) Is this a finite impulse response (FIR) or infinite impulse response (IIR) filter? Why? B) What are the initial conditions and their values? Why? C) Draw the block diagram of the filter relating input x[n] and output y[n] D) Derive a formula for the transfer function in...
 Consider an LTI system whose input x[n] and output y[n] are related by the difference equation y[n – 1] + 3 y[n] + $y[n + 1] = x[n]. Determine the three possible choices for the impulse response that makes this system 1) causal, 2) two-sided and 3) anti-causal. Then for each case, determine if the system is stable or not. Causality Impulse Response Stability Causal Unstable v two-sided Unstable anti-Causal Unstable y In your answers, enter z(n) for a discrete-time...
Consider an LTI system whose input x[n] and output y[n] are related by the difference equation y[n – 1] + 3 y[n] + $y[n + 1] = x[n]. Determine the three possible choices for the impulse response that makes this system 1) causal, 2) two-sided and 3) anti-causal. Then for each case, determine if the system is stable or not. Causality Impulse Response Stability Causal Unstable v two-sided Unstable anti-Causal Unstable y In your answers, enter z(n) for a discrete-time...
 discrete time signals and systems
causal LTI system has the block diagram:
(a) find a difference equation relating y[n] and x[n]
(b) determine if the system is stable
// هبه ۸[u] [u]x
discrete time signals and systems
causal LTI system has the block diagram:
(a) find a difference equation relating y[n] and x[n]
(b) determine if the system is stable
// هبه ۸[u] [u]x
 (2) Consider the causal discrete-time LTI system with an input r (n) and an output y(n) as shown in Figure 1, where K 6 (constant), system #1 is described by its impulse response: h(n) = -36(n) + 0.48(n- 1)+8.26(n-2), and system # 2 has the difference equation given by: y(n)+0.1y(n-1)+0.3y(n-2)- 2a(n). (a) Determine the corresponding difference equation of the system #1. Hence, write its fre- quency response. (b) Find the frequency response of system #2. 1 system #1 system #2...
(2) Consider the causal discrete-time LTI system with an input r (n) and an output y(n) as shown in Figure 1, where K 6 (constant), system #1 is described by its impulse response: h(n) = -36(n) + 0.48(n- 1)+8.26(n-2), and system # 2 has the difference equation given by: y(n)+0.1y(n-1)+0.3y(n-2)- 2a(n). (a) Determine the corresponding difference equation of the system #1. Hence, write its fre- quency response. (b) Find the frequency response of system #2. 1 system #1 system #2...
Most questions answered within 3 hours.
-
In reaching her destination, a backpacker walks with an average
velocity of 1.13 m/s, due west....
asked 50 seconds from now -
Executive Program Practical Connection Assignment
Subject : Operations Security.
Assignment:
Provide a reflection of at least...
asked 8 minutes ago -
Every time Casey is at bat he has a 0.4 probability of
getting on base (assume...
asked 16 minutes ago -
The Walston Company is to be liquidated and has the following
liabilities:
Income taxes
$
9,400...
asked 23 minutes ago -
If
the more comprehensive data is available in MEPS, why does the NHIS
still exist? How...
asked 44 minutes ago -
Koo argues that the Japanese economy in the 1990s suffered from
a balance sheet recession. What...
asked 37 minutes ago -
Automobile mechanics conduct diagnosis tests on 150 new cars of
particular make and model to determine...
asked 32 minutes ago -
11) Find the proceeds of a 5 year non-interest
bearing note for $6500 discounted 2.5 years...
asked 38 minutes ago -
Required: Prepare the consolidated financial statements of
Griffin Ltd at 30 June 2019.
Griffin Ltd is...
asked 47 minutes ago -
1.How large must the coefficient of static friction be between
the tires and the road if...
asked 1 hour ago -
What is the time complexity (Big-O) of the following code?
class Main
{
// Recursive...
asked 1 hour ago -
Economists look at any situation in terms of its component
parts: the people making decisions, the...
asked 1 hour ago