
Homework Answers

Add Answer to:
Consider the linear transformation T from V = P2 to W = P2 given by Tlao...
Consider the linear transformation T from V = P2 to W = P2 given by Tao...
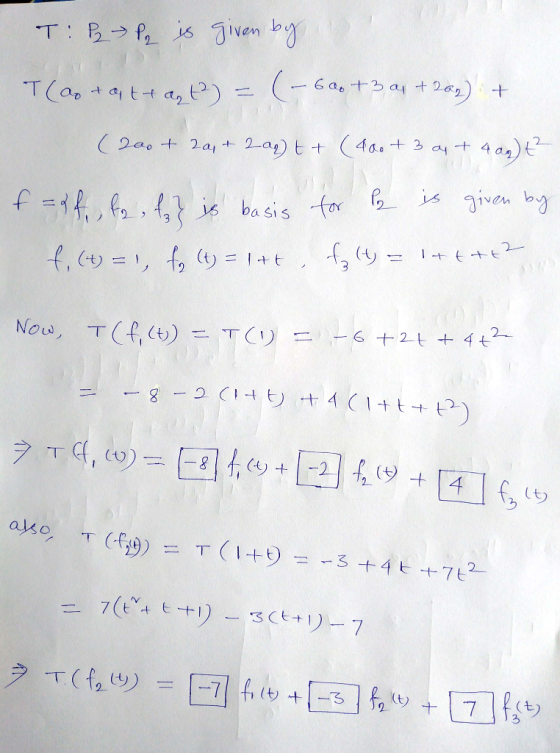
 Consider the linear transformation T from V = P2 to W = P2 given by Tao + ayt + azt) = (-63, + 2a, + 3a2) + (2a, + 4aq + 2az)t + (220 + 2a, + 3a2)2 Let F = (F1, F2, f3) be the ordered basis in P2 given by f(t) = 1, 72(t) = 1 + t, f3(t) = 1 +t+2 Find the coordinate matrix (TFF of T relative to the ordered basis Fused in both V...
Consider the linear transformation T from V = P2 to W = P2 given by Tao + ayt + azt) = (-63, + 2a, + 3a2) + (2a, + 4aq + 2az)t + (220 + 2a, + 3a2)2 Let F = (F1, F2, f3) be the ordered basis in P2 given by f(t) = 1, 72(t) = 1 + t, f3(t) = 1 +t+2 Find the coordinate matrix (TFF of T relative to the ordered basis Fused in both V...
show work pls! Let L :P2 →P3 be the linear transformation given by L(p(t)) = 5p"(t)...
 show work pls!
Let L :P2 →P3 be the linear transformation given by L(p(t)) = 5p"(t) + 3p' (t) + 1p(t) + 4tp(t). Let E = (e1, C2, C3) be the basis of Pề given by ei(t) = 1, ez(t) = t, ez(t) = 62. and let F = (f1, f2, f3, f4) be the basis of P given by fi(t) = 1, fz(t) = t, f3(t) = ť, fa(t) = {'. Find the coordinate matrix LFE of L relative...
show work pls!
Let L :P2 →P3 be the linear transformation given by L(p(t)) = 5p"(t) + 3p' (t) + 1p(t) + 4tp(t). Let E = (e1, C2, C3) be the basis of Pề given by ei(t) = 1, ez(t) = t, ez(t) = 62. and let F = (f1, f2, f3, f4) be the basis of P given by fi(t) = 1, fz(t) = t, f3(t) = ť, fa(t) = {'. Find the coordinate matrix LFE of L relative...
2. (a) Let B = {f1, f2, f3} be a subset of P2 where fi(x) =...
 2. (a) Let B = {f1, f2, f3} be a subset of P2 where fi(x) = x² – 3, f2(x) = x2 – 2x and f3(x) = x. Show that B is a basis of P2. (b) Determine whether or not the following sets are subspaces of F. (i) X = {f € F | f(x) = a(x + cos x), a € R}. (ii) Y = {f EF | f(x) = ax + sin x, a € R}. (c)...
2. (a) Let B = {f1, f2, f3} be a subset of P2 where fi(x) = x² – 3, f2(x) = x2 – 2x and f3(x) = x. Show that B is a basis of P2. (b) Determine whether or not the following sets are subspaces of F. (i) X = {f € F | f(x) = a(x + cos x), a € R}. (ii) Y = {f EF | f(x) = ax + sin x, a € R}. (c)...
Determine whether or not the following transformation T :V + W is a linear transformation. If...
 Determine whether or not the following transformation T :V + W is a linear transformation. If T is not a linear transformation, provide a counter example. If it is, then: (i) find the nullspace N(T) and nullity of T, (ii) find the range R(T) and rank of T, (iii) determine if T is one-to-one, (iv) determine if T is onto. : (a) T: R3 + R2 defined by T(x, y, z) = (2x, y, z) (b) T: R2 + R2...
Determine whether or not the following transformation T :V + W is a linear transformation. If T is not a linear transformation, provide a counter example. If it is, then: (i) find the nullspace N(T) and nullity of T, (ii) find the range R(T) and rank of T, (iii) determine if T is one-to-one, (iv) determine if T is onto. : (a) T: R3 + R2 defined by T(x, y, z) = (2x, y, z) (b) T: R2 + R2...
11 1 11 3. Let f1, f2, ..., fn are differentiable functions from V HR with...
 11 1 11 3. Let f1, f2, ..., fn are differentiable functions from V HR with V a Hilbert space. Define F :V HRN by F(a) = [fi(x)] f2(2x) I:T, V x EV, [fn (2)] where R” is endowed with the standard inner product. Prove that T(V fi(2), y) | |(Vf2(2), y) | DF(x)(y) = V rEV. Liv fn(x), y)]
11 1 11 3. Let f1, f2, ..., fn are differentiable functions from V HR with V a Hilbert space. Define F :V HRN by F(a) = [fi(x)] f2(2x) I:T, V x EV, [fn (2)] where R” is endowed with the standard inner product. Prove that T(V fi(2), y) | |(Vf2(2), y) | DF(x)(y) = V rEV. Liv fn(x), y)]
M 26.5. Let T :V →W be a linear transformation: let Theore T c(w)-*(V) be the dual transformation...
 Verify (2) and (3) of Theorem 26.5.
m 26.5. Let T :V →W be a linear transformation: let Theore T c(w)-*(V) be the dual transformation. Then: (1) T* is linear. (3) If S : W → X is a linear transformation, then (SoT)" f = T(S* f). Proof. The proofs are straightforward. One verifies (1), for instance, as follows: whence T. (af + bg) = a T* f + bT" g. ロ The following diagrams illustrate property (3): c*(W) S*...
Verify (2) and (3) of Theorem 26.5.
m 26.5. Let T :V →W be a linear transformation: let Theore T c(w)-*(V) be the dual transformation. Then: (1) T* is linear. (3) If S : W → X is a linear transformation, then (SoT)" f = T(S* f). Proof. The proofs are straightforward. One verifies (1), for instance, as follows: whence T. (af + bg) = a T* f + bT" g. ロ The following diagrams illustrate property (3): c*(W) S*...
Let V P2(R) and let T V-V be a linear transformation defined by T(p)-q, where (x)(r...
 Let V P2(R) and let T V-V be a linear transformation defined by T(p)-q, where (x)(r p (r Let B = {x, 1 + x2, 2x-1} be a basis of V. Compute [TIB,B, and deduce if it is eigenvectors basis of
Let V P2(R) and let T V-V be a linear transformation defined by T(p)-q, where (x)(r p (r Let B = {x, 1 + x2, 2x-1} be a basis of V. Compute [TIB,B, and deduce if it is eigenvectors basis of
QUESTION 4 Let T R3-P2 be defined by T(a, b, c) - (a + b + e) +(a+b)a2 (4.1) Show that T is a linear transformation (4.2) Fınd the matrix representation [T]s, B, of T relative to the basıs in R3 and...
 QUESTION 4 Let T R3-P2 be defined by T(a, b, c) - (a + b + e) +(a+b)a2 (4.1) Show that T is a linear transformation (4.2) Fınd the matrix representation [T]s, B, of T relative to the basıs in R3 and the basis in P2, ordered from left to right Determine the range R(T of T Is T onto? In other words, is it true that R(T)P2 Let x, y E R3 Show that x-y ker(T) f and only...
QUESTION 4 Let T R3-P2 be defined by T(a, b, c) - (a + b + e) +(a+b)a2 (4.1) Show that T is a linear transformation (4.2) Fınd the matrix representation [T]s, B, of T relative to the basıs in R3 and the basis in P2, ordered from left to right Determine the range R(T of T Is T onto? In other words, is it true that R(T)P2 Let x, y E R3 Show that x-y ker(T) f and only...
Problem 3. Let V and W be vector spaces of dimensions n and m, respectively, and let T : V -> W be a linear transfor...
 Problem 3. Let V and W be vector spaces of dimensions n and m, respectively, and let T : V -> W be a linear transformation. (a) Prove that for every pair of ordered bases B = exists a unique m x n matrix A such that [T(E)]c = A[r3 for all e V. The matrix A is called the (B,C)-matrix of T, written A = c[T]b. (b) For each n E N, let Pm be the vector space of...
Problem 3. Let V and W be vector spaces of dimensions n and m, respectively, and let T : V -> W be a linear transformation. (a) Prove that for every pair of ordered bases B = exists a unique m x n matrix A such that [T(E)]c = A[r3 for all e V. The matrix A is called the (B,C)-matrix of T, written A = c[T]b. (b) For each n E N, let Pm be the vector space of...
5. Let V be the subset of Cº(R) consisting of all functions that can be expressed...
 5. Let V be the subset of Cº(R) consisting of all functions that can be expressed in the form a sin 2x + be 4x + cos2r for a, b, c ER. (a) (4 points) Prove that V is a subspace of C(R). (b) (3 points) Let fix) = sin 2x + e4r f2(x) = sin 2.c + cos 2.0 f3(x) = 4x + cos2r. The set B = (f1, f2, f3) is an ordered basis for V. (You do...
5. Let V be the subset of Cº(R) consisting of all functions that can be expressed in the form a sin 2x + be 4x + cos2r for a, b, c ER. (a) (4 points) Prove that V is a subspace of C(R). (b) (3 points) Let fix) = sin 2x + e4r f2(x) = sin 2.c + cos 2.0 f3(x) = 4x + cos2r. The set B = (f1, f2, f3) is an ordered basis for V. (You do...
 Consider the linear transformation T from V = P2 to W = P2 given by Tao + ayt + azt) = (-63, + 2a, + 3a2) + (2a, + 4aq + 2az)t + (220 + 2a, + 3a2)2 Let F = (F1, F2, f3) be the ordered basis in P2 given by f(t) = 1, 72(t) = 1 + t, f3(t) = 1 +t+2 Find the coordinate matrix (TFF of T relative to the ordered basis Fused in both V...
Consider the linear transformation T from V = P2 to W = P2 given by Tao + ayt + azt) = (-63, + 2a, + 3a2) + (2a, + 4aq + 2az)t + (220 + 2a, + 3a2)2 Let F = (F1, F2, f3) be the ordered basis in P2 given by f(t) = 1, 72(t) = 1 + t, f3(t) = 1 +t+2 Find the coordinate matrix (TFF of T relative to the ordered basis Fused in both V...
 show work pls!
Let L :P2 →P3 be the linear transformation given by L(p(t)) = 5p"(t) + 3p' (t) + 1p(t) + 4tp(t). Let E = (e1, C2, C3) be the basis of Pề given by ei(t) = 1, ez(t) = t, ez(t) = 62. and let F = (f1, f2, f3, f4) be the basis of P given by fi(t) = 1, fz(t) = t, f3(t) = ť, fa(t) = {'. Find the coordinate matrix LFE of L relative...
show work pls!
Let L :P2 →P3 be the linear transformation given by L(p(t)) = 5p"(t) + 3p' (t) + 1p(t) + 4tp(t). Let E = (e1, C2, C3) be the basis of Pề given by ei(t) = 1, ez(t) = t, ez(t) = 62. and let F = (f1, f2, f3, f4) be the basis of P given by fi(t) = 1, fz(t) = t, f3(t) = ť, fa(t) = {'. Find the coordinate matrix LFE of L relative...
 2. (a) Let B = {f1, f2, f3} be a subset of P2 where fi(x) = x² – 3, f2(x) = x2 – 2x and f3(x) = x. Show that B is a basis of P2. (b) Determine whether or not the following sets are subspaces of F. (i) X = {f € F | f(x) = a(x + cos x), a € R}. (ii) Y = {f EF | f(x) = ax + sin x, a € R}. (c)...
2. (a) Let B = {f1, f2, f3} be a subset of P2 where fi(x) = x² – 3, f2(x) = x2 – 2x and f3(x) = x. Show that B is a basis of P2. (b) Determine whether or not the following sets are subspaces of F. (i) X = {f € F | f(x) = a(x + cos x), a € R}. (ii) Y = {f EF | f(x) = ax + sin x, a € R}. (c)...
 Determine whether or not the following transformation T :V + W is a linear transformation. If T is not a linear transformation, provide a counter example. If it is, then: (i) find the nullspace N(T) and nullity of T, (ii) find the range R(T) and rank of T, (iii) determine if T is one-to-one, (iv) determine if T is onto. : (a) T: R3 + R2 defined by T(x, y, z) = (2x, y, z) (b) T: R2 + R2...
Determine whether or not the following transformation T :V + W is a linear transformation. If T is not a linear transformation, provide a counter example. If it is, then: (i) find the nullspace N(T) and nullity of T, (ii) find the range R(T) and rank of T, (iii) determine if T is one-to-one, (iv) determine if T is onto. : (a) T: R3 + R2 defined by T(x, y, z) = (2x, y, z) (b) T: R2 + R2...
 11 1 11 3. Let f1, f2, ..., fn are differentiable functions from V HR with V a Hilbert space. Define F :V HRN by F(a) = [fi(x)] f2(2x) I:T, V x EV, [fn (2)] where R” is endowed with the standard inner product. Prove that T(V fi(2), y) | |(Vf2(2), y) | DF(x)(y) = V rEV. Liv fn(x), y)]
11 1 11 3. Let f1, f2, ..., fn are differentiable functions from V HR with V a Hilbert space. Define F :V HRN by F(a) = [fi(x)] f2(2x) I:T, V x EV, [fn (2)] where R” is endowed with the standard inner product. Prove that T(V fi(2), y) | |(Vf2(2), y) | DF(x)(y) = V rEV. Liv fn(x), y)]
 Verify (2) and (3) of Theorem 26.5.
m 26.5. Let T :V →W be a linear transformation: let Theore T c(w)-*(V) be the dual transformation. Then: (1) T* is linear. (3) If S : W → X is a linear transformation, then (SoT)" f = T(S* f). Proof. The proofs are straightforward. One verifies (1), for instance, as follows: whence T. (af + bg) = a T* f + bT" g. ロ The following diagrams illustrate property (3): c*(W) S*...
Verify (2) and (3) of Theorem 26.5.
m 26.5. Let T :V →W be a linear transformation: let Theore T c(w)-*(V) be the dual transformation. Then: (1) T* is linear. (3) If S : W → X is a linear transformation, then (SoT)" f = T(S* f). Proof. The proofs are straightforward. One verifies (1), for instance, as follows: whence T. (af + bg) = a T* f + bT" g. ロ The following diagrams illustrate property (3): c*(W) S*...
 Let V P2(R) and let T V-V be a linear transformation defined by T(p)-q, where (x)(r p (r Let B = {x, 1 + x2, 2x-1} be a basis of V. Compute [TIB,B, and deduce if it is eigenvectors basis of
Let V P2(R) and let T V-V be a linear transformation defined by T(p)-q, where (x)(r p (r Let B = {x, 1 + x2, 2x-1} be a basis of V. Compute [TIB,B, and deduce if it is eigenvectors basis of
 QUESTION 4 Let T R3-P2 be defined by T(a, b, c) - (a + b + e) +(a+b)a2 (4.1) Show that T is a linear transformation (4.2) Fınd the matrix representation [T]s, B, of T relative to the basıs in R3 and the basis in P2, ordered from left to right Determine the range R(T of T Is T onto? In other words, is it true that R(T)P2 Let x, y E R3 Show that x-y ker(T) f and only...
QUESTION 4 Let T R3-P2 be defined by T(a, b, c) - (a + b + e) +(a+b)a2 (4.1) Show that T is a linear transformation (4.2) Fınd the matrix representation [T]s, B, of T relative to the basıs in R3 and the basis in P2, ordered from left to right Determine the range R(T of T Is T onto? In other words, is it true that R(T)P2 Let x, y E R3 Show that x-y ker(T) f and only...
 Problem 3. Let V and W be vector spaces of dimensions n and m, respectively, and let T : V -> W be a linear transformation. (a) Prove that for every pair of ordered bases B = exists a unique m x n matrix A such that [T(E)]c = A[r3 for all e V. The matrix A is called the (B,C)-matrix of T, written A = c[T]b. (b) For each n E N, let Pm be the vector space of...
Problem 3. Let V and W be vector spaces of dimensions n and m, respectively, and let T : V -> W be a linear transformation. (a) Prove that for every pair of ordered bases B = exists a unique m x n matrix A such that [T(E)]c = A[r3 for all e V. The matrix A is called the (B,C)-matrix of T, written A = c[T]b. (b) For each n E N, let Pm be the vector space of...
 5. Let V be the subset of Cº(R) consisting of all functions that can be expressed in the form a sin 2x + be 4x + cos2r for a, b, c ER. (a) (4 points) Prove that V is a subspace of C(R). (b) (3 points) Let fix) = sin 2x + e4r f2(x) = sin 2.c + cos 2.0 f3(x) = 4x + cos2r. The set B = (f1, f2, f3) is an ordered basis for V. (You do...
5. Let V be the subset of Cº(R) consisting of all functions that can be expressed in the form a sin 2x + be 4x + cos2r for a, b, c ER. (a) (4 points) Prove that V is a subspace of C(R). (b) (3 points) Let fix) = sin 2x + e4r f2(x) = sin 2.c + cos 2.0 f3(x) = 4x + cos2r. The set B = (f1, f2, f3) is an ordered basis for V. (You do...
Most questions answered within 3 hours.
-
Write a program to solve the Josephus problem, with the following
modification:
Sample Input:
./a.out n...
asked 5 minutes ago -
At the start of a CD it is spinning at a rate of 525 rpm
(revolutions...
asked 41 minutes ago -
4. Without doing any calculations, predict whether the observed
∆T would increase, decrease or remain the...
asked 1 hour ago -
Based on the range, which of the following sets of scores has
the greatest variability? 3,...
asked 3 hours ago -
Ripples in a pond travel at a velocity of 3 m/s with one peak
passing a...
asked 2 hours ago -
A man stands on the roof of a building of height 13.0 mm and
throws a...
asked 2 hours ago -
The extent to which assets are financed by borrowed funds and
other liabilities is indicated by:...
asked 4 hours ago -
Explain in detail
Germany is the fifth largest economy
explain what goods and services Germany specializes...
asked 4 hours ago -
The density of platinum is 21.45 g/mL. If a cube of platinum
with a mass of...
asked 4 hours ago -
Accounts Receivable
Sales
A/R Posting
Extended Sales Invoice
Packing Slip
Compare invoice to packing slip 2...
asked 4 hours ago -
Michaella, age 23, is a full-time law student and is claimed by
her parents as a...
asked 4 hours ago -
Why are polymers not typically casted into products?
asked 4 hours ago