
Homework Answers

Add Answer to:
1.3 Show that the IVP r=rt, (0) = 0 has infinitely many solutions. Explain why Theorem...
4. Consider the differential equation with initial condition r(0) = 0 (a) What does the existence...
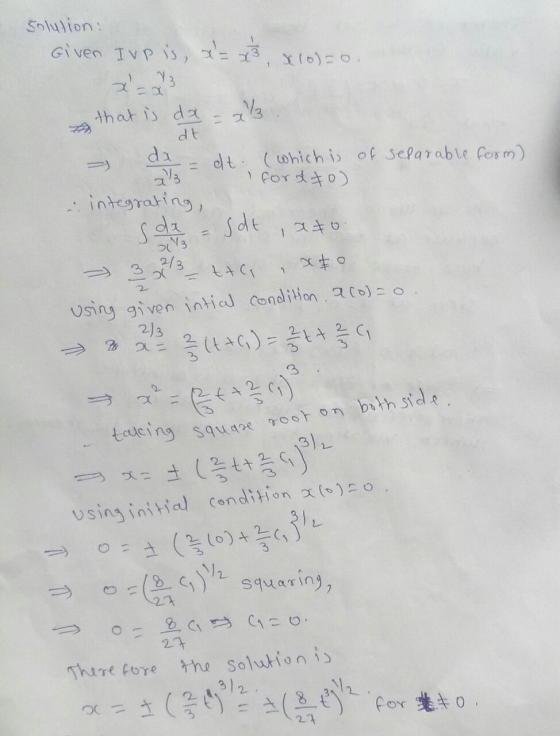
 4. Consider the differential equation with initial condition r(0) = 0 (a) What does the existence and uniqueness theorem tell you about the solution to this IVP? (10 points) (b) Use separation of variables to find the solution for the IVP r(to) = Io for to +0. (5 points) (c) Are the solutions to b) unique? (5 points) (d) Sketch solutions for Xo = --1,0,1 and to = 1 and show that for all to and to the solution goes...
4. Consider the differential equation with initial condition r(0) = 0 (a) What does the existence and uniqueness theorem tell you about the solution to this IVP? (10 points) (b) Use separation of variables to find the solution for the IVP r(to) = Io for to +0. (5 points) (c) Are the solutions to b) unique? (5 points) (d) Sketch solutions for Xo = --1,0,1 and to = 1 and show that for all to and to the solution goes...
given ivp y' = (2y)/x, y(x0) = y0 using the existence and uniqueness theorem show that...
given ivp y' = (2y)/x, y(x0) = y0 using the existence and uniqueness theorem show that a unique solution exists on any interval where x0 does not equal 0, no solution exists if y(0) = y0 does not equal 0, and and infinite number of solutions exist if y(0) = 0
Consider the IVP, 1. Apply the Fundamental Existence and Uniqueness Theorem to show that a solution...
Consider the IVP, 1. Apply the Fundamental Existence and Uniqueness Theorem to show that a solution exists. 2. Use the Runge-Kutta method with various step-sizes to estimate the maximum t-value, , for which the solution is defined on the interval . Include a few representative graphs with your submission, and the lists of points. 3. Find the exact solution to the IVP and solve for analytically. How close was your approximation from the previous question? 4. The Runge-Kutta method continues...
Geometrically, why does a homogenous system of two linear equations in three variables have infinitely many...
Geometrically, why does a homogenous system of two linear equations in three variables have infinitely many solutions? If the system were nonhomogeneous, how many solutions might there be? Explain this geometrically.
What is the value of a € R such that the following system has infinitely many...
 What is the value of a € R such that the following system has infinitely many solutions? 21 =1 +22 + 3.23 2.12 + 2x3 = 1 3.01 +502 + (a? + a)33. = +1 Answer:
What is the value of a € R such that the following system has infinitely many solutions? 21 =1 +22 + 3.23 2.12 + 2x3 = 1 3.01 +502 + (a? + a)33. = +1 Answer:
I Do We Have the Complete Solution Set? A differential operator in R[D] has order n can be writte...
 I Do We Have the Complete Solution Set? A differential operator in R[D] has order n can be written out in the form o(n-1) with the last coefficient cn (at least) not equal to zero. The key to determining the dimension of these solution spaces is the following existence and uniqueness theorem for initial value problems. 'So it can be efficiently described by giving a basis. ethciently described by giving a basis Theorem 1 (Existence and Unique ness Theorem for...
I Do We Have the Complete Solution Set? A differential operator in R[D] has order n can be written out in the form o(n-1) with the last coefficient cn (at least) not equal to zero. The key to determining the dimension of these solution spaces is the following existence and uniqueness theorem for initial value problems. 'So it can be efficiently described by giving a basis. ethciently described by giving a basis Theorem 1 (Existence and Unique ness Theorem for...
Ax=O Unique solution (trivial solution x-0) No free variables Infinitely many (nontrivial) solutions Some free variable...
 Ax=O Unique solution (trivial solution x-0) No free variables Infinitely many (nontrivial) solutions Some free variables Every column of A is pivot column | (=> rank(A) = # of columns of A Some columns of A are not pivot columns rank(A)< #of columns of A You can use the above figure to answer the following questions are about homogeneous systems Ax-0. Answer TRUE or FALSE. If the answer is FALSE, choose FALSE with the appropriate counterexample, i.e example that shows...
Ax=O Unique solution (trivial solution x-0) No free variables Infinitely many (nontrivial) solutions Some free variables Every column of A is pivot column | (=> rank(A) = # of columns of A Some columns of A are not pivot columns rank(A)< #of columns of A You can use the above figure to answer the following questions are about homogeneous systems Ax-0. Answer TRUE or FALSE. If the answer is FALSE, choose FALSE with the appropriate counterexample, i.e example that shows...
3. (Existence/uniqueness theorem, Strogatz 6.2): Consider the systenm (a) Show by substitution th...
 3. (Existence/uniqueness theorem, Strogatz 6.2): Consider the systenm (a) Show by substitution that r(t)-sint, y(t) - cost is an exact solution (b) Now consider another solution, with initial condition 2(0) = 1/2, y(0) = 0, Without doing any work, explain why this solution st satisfy a2 + y2 <1 for all t< oo. For the systems in problems 4-7, find the fixed points, lincarize about them, classify their stability, draw their local trajectories, and try to fill in the full...
3. (Existence/uniqueness theorem, Strogatz 6.2): Consider the systenm (a) Show by substitution that r(t)-sint, y(t) - cost is an exact solution (b) Now consider another solution, with initial condition 2(0) = 1/2, y(0) = 0, Without doing any work, explain why this solution st satisfy a2 + y2 <1 for all t< oo. For the systems in problems 4-7, find the fixed points, lincarize about them, classify their stability, draw their local trajectories, and try to fill in the full...
Consider differential equation (x - 1)y" – xy' + y = 0. a). Show that yi...
 Consider differential equation (x - 1)y" – xy' + y = 0. a). Show that yi = el is a solution of this equation. Use the method of reduction of order to find second linearly independent solution y2 of this equation. (2P.) b). Find solution of the initial value problem (1P.) y(1) = 0, y'(1) = 1. c). Find solution of the initial value problem (1P.) y(1) = 0, y'(1) = 0. d). Does your answer in b) and c)...
Consider differential equation (x - 1)y" – xy' + y = 0. a). Show that yi = el is a solution of this equation. Use the method of reduction of order to find second linearly independent solution y2 of this equation. (2P.) b). Find solution of the initial value problem (1P.) y(1) = 0, y'(1) = 1. c). Find solution of the initial value problem (1P.) y(1) = 0, y'(1) = 0. d). Does your answer in b) and c)...
could you please help me with understanding why the answer to d) is not 3 parameters but instead 5,4 or 3? In a row...
 could you please help me with understanding why the answer to
d) is not 3 parameters but instead 5,4 or 3? In a row echelon form,
don’t we know that each non-zero rows has a leading 1 (by
definition)? And so we know that the rank must be 3? 6-3=3 (by
given theorem: n-r= #parameter)
4xy + 5ax2- 2ay +5x4 + 2xs 2x4+2xs 4x4 +x = 0 in ce 2x3- 9. (a) 2x, +2x- 4a x a + 2ax3 +...
could you please help me with understanding why the answer to
d) is not 3 parameters but instead 5,4 or 3? In a row echelon form,
don’t we know that each non-zero rows has a leading 1 (by
definition)? And so we know that the rank must be 3? 6-3=3 (by
given theorem: n-r= #parameter)
4xy + 5ax2- 2ay +5x4 + 2xs 2x4+2xs 4x4 +x = 0 in ce 2x3- 9. (a) 2x, +2x- 4a x a + 2ax3 +...
 4. Consider the differential equation with initial condition r(0) = 0 (a) What does the existence and uniqueness theorem tell you about the solution to this IVP? (10 points) (b) Use separation of variables to find the solution for the IVP r(to) = Io for to +0. (5 points) (c) Are the solutions to b) unique? (5 points) (d) Sketch solutions for Xo = --1,0,1 and to = 1 and show that for all to and to the solution goes...
4. Consider the differential equation with initial condition r(0) = 0 (a) What does the existence and uniqueness theorem tell you about the solution to this IVP? (10 points) (b) Use separation of variables to find the solution for the IVP r(to) = Io for to +0. (5 points) (c) Are the solutions to b) unique? (5 points) (d) Sketch solutions for Xo = --1,0,1 and to = 1 and show that for all to and to the solution goes...
 What is the value of a € R such that the following system has infinitely many solutions? 21 =1 +22 + 3.23 2.12 + 2x3 = 1 3.01 +502 + (a? + a)33. = +1 Answer:
What is the value of a € R such that the following system has infinitely many solutions? 21 =1 +22 + 3.23 2.12 + 2x3 = 1 3.01 +502 + (a? + a)33. = +1 Answer:
 I Do We Have the Complete Solution Set? A differential operator in R[D] has order n can be written out in the form o(n-1) with the last coefficient cn (at least) not equal to zero. The key to determining the dimension of these solution spaces is the following existence and uniqueness theorem for initial value problems. 'So it can be efficiently described by giving a basis. ethciently described by giving a basis Theorem 1 (Existence and Unique ness Theorem for...
I Do We Have the Complete Solution Set? A differential operator in R[D] has order n can be written out in the form o(n-1) with the last coefficient cn (at least) not equal to zero. The key to determining the dimension of these solution spaces is the following existence and uniqueness theorem for initial value problems. 'So it can be efficiently described by giving a basis. ethciently described by giving a basis Theorem 1 (Existence and Unique ness Theorem for...
 Ax=O Unique solution (trivial solution x-0) No free variables Infinitely many (nontrivial) solutions Some free variables Every column of A is pivot column | (=> rank(A) = # of columns of A Some columns of A are not pivot columns rank(A)< #of columns of A You can use the above figure to answer the following questions are about homogeneous systems Ax-0. Answer TRUE or FALSE. If the answer is FALSE, choose FALSE with the appropriate counterexample, i.e example that shows...
Ax=O Unique solution (trivial solution x-0) No free variables Infinitely many (nontrivial) solutions Some free variables Every column of A is pivot column | (=> rank(A) = # of columns of A Some columns of A are not pivot columns rank(A)< #of columns of A You can use the above figure to answer the following questions are about homogeneous systems Ax-0. Answer TRUE or FALSE. If the answer is FALSE, choose FALSE with the appropriate counterexample, i.e example that shows...
 3. (Existence/uniqueness theorem, Strogatz 6.2): Consider the systenm (a) Show by substitution that r(t)-sint, y(t) - cost is an exact solution (b) Now consider another solution, with initial condition 2(0) = 1/2, y(0) = 0, Without doing any work, explain why this solution st satisfy a2 + y2 <1 for all t< oo. For the systems in problems 4-7, find the fixed points, lincarize about them, classify their stability, draw their local trajectories, and try to fill in the full...
3. (Existence/uniqueness theorem, Strogatz 6.2): Consider the systenm (a) Show by substitution that r(t)-sint, y(t) - cost is an exact solution (b) Now consider another solution, with initial condition 2(0) = 1/2, y(0) = 0, Without doing any work, explain why this solution st satisfy a2 + y2 <1 for all t< oo. For the systems in problems 4-7, find the fixed points, lincarize about them, classify their stability, draw their local trajectories, and try to fill in the full...
 Consider differential equation (x - 1)y" – xy' + y = 0. a). Show that yi = el is a solution of this equation. Use the method of reduction of order to find second linearly independent solution y2 of this equation. (2P.) b). Find solution of the initial value problem (1P.) y(1) = 0, y'(1) = 1. c). Find solution of the initial value problem (1P.) y(1) = 0, y'(1) = 0. d). Does your answer in b) and c)...
Consider differential equation (x - 1)y" – xy' + y = 0. a). Show that yi = el is a solution of this equation. Use the method of reduction of order to find second linearly independent solution y2 of this equation. (2P.) b). Find solution of the initial value problem (1P.) y(1) = 0, y'(1) = 1. c). Find solution of the initial value problem (1P.) y(1) = 0, y'(1) = 0. d). Does your answer in b) and c)...
 could you please help me with understanding why the answer to
d) is not 3 parameters but instead 5,4 or 3? In a row echelon form,
don’t we know that each non-zero rows has a leading 1 (by
definition)? And so we know that the rank must be 3? 6-3=3 (by
given theorem: n-r= #parameter)
4xy + 5ax2- 2ay +5x4 + 2xs 2x4+2xs 4x4 +x = 0 in ce 2x3- 9. (a) 2x, +2x- 4a x a + 2ax3 +...
could you please help me with understanding why the answer to
d) is not 3 parameters but instead 5,4 or 3? In a row echelon form,
don’t we know that each non-zero rows has a leading 1 (by
definition)? And so we know that the rank must be 3? 6-3=3 (by
given theorem: n-r= #parameter)
4xy + 5ax2- 2ay +5x4 + 2xs 2x4+2xs 4x4 +x = 0 in ce 2x3- 9. (a) 2x, +2x- 4a x a + 2ax3 +...
Most questions answered within 3 hours.
-
Given P(Ec ) = 0.43, P(F) = 0.52, and P(EF) = 0.18.
Find P( E |...
asked 30 minutes ago -
Consider two empty containers A and B whose volumes are
10mL and 20mL respectively. 1mL of...
asked 33 minutes ago -
QUESTION 6
Determine the linear momentum of a 2,800 kg houseboat going 3
m/s.
9,100 kg.m/s...
asked 47 minutes ago -
Jor-el throws a ball upward from the top of a 728 foot building
on the planet...
asked 51 minutes ago -
Which of the following will most likely to happen if Federal
Reserve Bank decreases the money...
asked 34 minutes ago -
You’ve just joined the investment banking firm of Dewey,
Cheatum, and Howe. They’ve offered you two...
asked 28 minutes ago -
An air conditioner cools 226 m^3/min of humid air at 36 oC and
98% relative humidity...
asked 27 minutes ago -
Vaughn Manufacturing acquires a coal mine at a cost of $1870000.
Intangible development costs total $354000....
asked 37 minutes ago -
Question 5
What effect would a decrease in
temperature have on pressure, assuming that volume
(T)...
asked 49 minutes ago -
Draw the Lewis dot structures for the following molecules. None
of the atoms have a formal...
asked 53 minutes ago -
What does it mean when an element is radioactive?
a.
It means the element is changing...
asked 54 minutes ago -
A company deposits $6,000 in a bank at the end of every year for
10 years....
asked 53 minutes ago