
Homework Answers


6. Suppose that, instead of boundary conditions Eqs. (2) and (3), we have u(x, o, t) -f^(r), u(r, b, t)() 0<x<a, 0<t (2') u(0,y, t)-gi(v), u(a,y,t)-89(v) 0 <y<b, o<t (3) Show th...
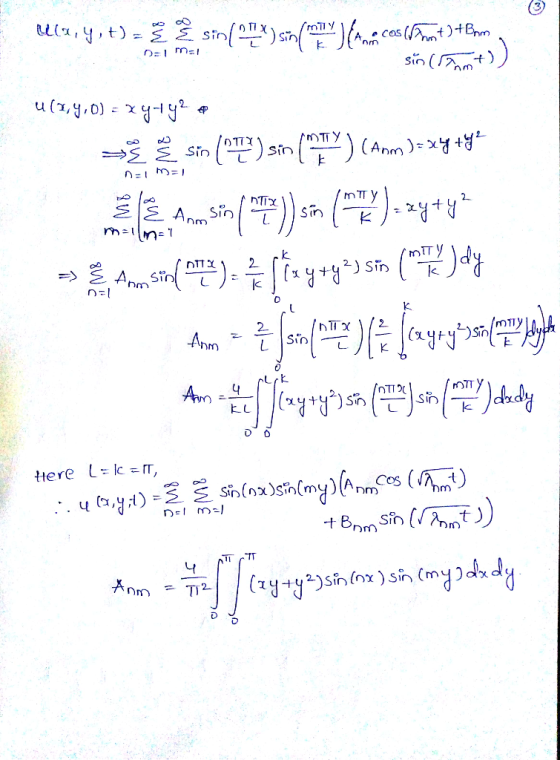
 6. Suppose that, instead of boundary conditions Eqs. (2) and (3), we have u(x, o, t) -f^(r), u(r, b, t)() 0<x<a, 0<t (2') u(0,y, t)-gi(v), u(a,y,t)-89(v) 0 <y<b, o<t (3) Show that the steady-state solution involves the potential equation, and indicate how to solve it.
6. Suppose that, instead of boundary conditions Eqs. (2) and (3), we have u(x, o, t) -f^(r), u(r, b, t)() 0
6. Suppose that, instead of boundary conditions Eqs. (2) and (3), we have u(x, o, t) -f^(r), u(r, b, t)() 0<x<a, 0<t (2') u(0,y, t)-gi(v), u(a,y,t)-89(v) 0 <y<b, o<t (3) Show that the steady-state solution involves the potential equation, and indicate how to solve it.
6. Suppose that, instead of boundary conditions Eqs. (2) and (3), we have u(x, o, t) -f^(r), u(r, b, t)() 0
use Matlab y'=t, y0)=1, solution: y(t)=1+t/2 y' = 2(1 +1)y, y(0)=1, solution: y(t) = +24 v=5"y,...
 use Matlab
y'=t, y0)=1, solution: y(t)=1+t/2 y' = 2(1 +1)y, y(0)=1, solution: y(t) = +24 v=5"y, y(0)=1, solution: y(t) = { y'=+/yº, y(0)=1, solution: y(t) = (31/4+1)1/3 For the IVPs above, make a log-log plot of the error of Runge-Kutta 4th order at t=1 as a function of h with h=0.1 x 2-k for 0 <k <5.
use Matlab
y'=t, y0)=1, solution: y(t)=1+t/2 y' = 2(1 +1)y, y(0)=1, solution: y(t) = +24 v=5"y, y(0)=1, solution: y(t) = { y'=+/yº, y(0)=1, solution: y(t) = (31/4+1)1/3 For the IVPs above, make a log-log plot of the error of Runge-Kutta 4th order at t=1 as a function of h with h=0.1 x 2-k for 0 <k <5.
Let y: 1 + R2 be a regular parametrised curve which we write as y(t) =...
 Let y: 1 + R2 be a regular parametrised curve which we write as y(t) = (v(t), v(t))" for some smooth maps u,v: 1 R. We assume furthermore that is never equal to zero on I. We define the surface of revolution Exy associated to y as (1) E = {r(t,0) = (v(t) cos(6), y(t) sin(0), v(0))?|tel, 0 € (0,27]} . Below, we consider the chart (U,r) obtained by taking U = I x (0,27), where the map r:U →...
Let y: 1 + R2 be a regular parametrised curve which we write as y(t) = (v(t), v(t))" for some smooth maps u,v: 1 R. We assume furthermore that is never equal to zero on I. We define the surface of revolution Exy associated to y as (1) E = {r(t,0) = (v(t) cos(6), y(t) sin(0), v(0))?|tel, 0 € (0,27]} . Below, we consider the chart (U,r) obtained by taking U = I x (0,27), where the map r:U →...
y(t) =-=-= is the unit step output for the system ....... 0 ſo 2 31 [0]...
 y(t) =-=-= is the unit step output for the system ....... 0 ſo 2 31 [0] X = 0 6 5 x + u(t) 1 4 2 y = [1 2 0x :-2 0 0 0 +XI u(1) 0 -6 -1 y = [1 0 0]x; x(0) = 0 26 --- -0 O -3 0 0 -6 1 x+ (1) 0 0-5 y = [ 011]x; x(0) = 0 ed o LO 0 1 * = -12 -8 1 x...
y(t) =-=-= is the unit step output for the system ....... 0 ſo 2 31 [0] X = 0 6 5 x + u(t) 1 4 2 y = [1 2 0x :-2 0 0 0 +XI u(1) 0 -6 -1 y = [1 0 0]x; x(0) = 0 26 --- -0 O -3 0 0 -6 1 x+ (1) 0 0-5 y = [ 011]x; x(0) = 0 ed o LO 0 1 * = -12 -8 1 x...
Given that A = 54 0 LO 3 -2 3 0] 0 has eigenvalues 11 =...
 Given that A = 54 0 LO 3 -2 3 0] 0 has eigenvalues 11 = –2 and 12 = 4 and 4] 1 a basis for Exy is 1-2 %. 1] Choose ALL the statement(s) that are ALWAYS TRUE. = -2 are O A is NOT diagonalizable since the algebraic multiplicity and the geometric multiplicity of x different. A is NOT diagonalizable since the algebraic multiplicity and the geometric multiplicity of 12 = 4 are different. O A is...
Given that A = 54 0 LO 3 -2 3 0] 0 has eigenvalues 11 = –2 and 12 = 4 and 4] 1 a basis for Exy is 1-2 %. 1] Choose ALL the statement(s) that are ALWAYS TRUE. = -2 are O A is NOT diagonalizable since the algebraic multiplicity and the geometric multiplicity of x different. A is NOT diagonalizable since the algebraic multiplicity and the geometric multiplicity of 12 = 4 are different. O A is...
Problem 1: Let y()- r(t+2)-r(t+1)+r(t)-r(t-1)-u(t-1)-r(t-2)+r(t-3), where r(t) is the ramp function. a) plot y(t) b) plot...
 Problem 1: Let y()- r(t+2)-r(t+1)+r(t)-r(t-1)-u(t-1)-r(t-2)+r(t-3), where r(t) is the ramp function. a) plot y(t) b) plot y'() c) Plot y(2t-3) d) calculate the energy of y(t) note: r(t) = t for t 0 and 0 for t < 0 Problem 2: Let x(t)s u(t)-u(t-2) and y(t) = t[u(t)-u(t-1)] a) b) plot x(t) and y(t) evaluate graphically and plot z(t) = x(t) * y(t) Problem 3: An LTI system has the impulse response h(t) = 5e-tu(t)-16e-2tu(t) + 13e-3t u(t) The input...
Problem 1: Let y()- r(t+2)-r(t+1)+r(t)-r(t-1)-u(t-1)-r(t-2)+r(t-3), where r(t) is the ramp function. a) plot y(t) b) plot y'() c) Plot y(2t-3) d) calculate the energy of y(t) note: r(t) = t for t 0 and 0 for t < 0 Problem 2: Let x(t)s u(t)-u(t-2) and y(t) = t[u(t)-u(t-1)] a) b) plot x(t) and y(t) evaluate graphically and plot z(t) = x(t) * y(t) Problem 3: An LTI system has the impulse response h(t) = 5e-tu(t)-16e-2tu(t) + 13e-3t u(t) The input...
Question 5 [3+(2+4) marks] (a) The matrix A has a repeated eigenvalue of 1 = 2....
 Question 5 [3+(2+4) marks] (a) The matrix A has a repeated eigenvalue of 1 = 2. During the solution of the solution (A-21)X = 0, the augmented matrix below appears. Find a basis for the eigenspace for this eigenvalue. Ti 0 -2 07 lo o o lo To ooo (b) (i) Show that if T(x) is a linear transformation from R" to R", that T(0) is the zero vector. (i) Assume that T(u) = 0 only when u = 0....
Question 5 [3+(2+4) marks] (a) The matrix A has a repeated eigenvalue of 1 = 2. During the solution of the solution (A-21)X = 0, the augmented matrix below appears. Find a basis for the eigenspace for this eigenvalue. Ti 0 -2 07 lo o o lo To ooo (b) (i) Show that if T(x) is a linear transformation from R" to R", that T(0) is the zero vector. (i) Assume that T(u) = 0 only when u = 0....
(24%) Find the Fourier transform of the signals given below: 1) x() 4e U() x(t) = e-3,Cos(12m)U(t) 2) x(t) = 36(1 + 4) + 26(1) + 43(1-5) 3) x[n]=(0.7)"U(n) 4) (24%) Find the Fourier tran...
 (24%) Find the Fourier transform of the signals given below: 1) x() 4e U() x(t) = e-3,Cos(12m)U(t) 2) x(t) = 36(1 + 4) + 26(1) + 43(1-5) 3) x[n]=(0.7)"U(n) 4)
(24%) Find the Fourier transform of the signals given below: 1) x() 4e U() x(t) = e-3,Cos(12m)U(t) 2) x(t) = 36(1 + 4) + 26(1) + 43(1-5) 3) x[n]=(0.7)"U(n) 4)
(24%) Find the Fourier transform of the signals given below: 1) x() 4e U() x(t) = e-3,Cos(12m)U(t) 2) x(t) = 36(1 + 4) + 26(1) + 43(1-5) 3) x[n]=(0.7)"U(n) 4)
(24%) Find the Fourier transform of the signals given below: 1) x() 4e U() x(t) = e-3,Cos(12m)U(t) 2) x(t) = 36(1 + 4) + 26(1) + 43(1-5) 3) x[n]=(0.7)"U(n) 4)
5s , y s-t to compute the (1 pt) In this problem we use the change...
 5s , y s-t to compute the (1 pt) In this problem we use the change of variables x integral(xy) dA, where R is the parallelogram formed by (0, 0), (5,1), (8, -2), and (3, -3) д(х, у) д(s,t) First find the magnitude of the Jacobian, ,b = Then, with a = and d с 3 b JRC+y) dA = ) dt ds =
5s , y s-t to compute the (1 pt) In this problem we use the change of variables x integral(xy) dA, where R is the parallelogram formed by (0, 0), (5,1), (8, -2), and (3, -3) д(х, у) д(s,t) First find the magnitude of the Jacobian, ,b = Then, with a = and d с 3 b JRC+y) dA = ) dt ds =
1. Consider the equation xy" - 2y' + (2 - x)y = 0,x > 0. We...
 1. Consider the equation xy" - 2y' + (2 - x)y = 0,x > 0. We can easily verify that y(x) = e* is a solution of the equation. Use reduction of order to determine the general solution of the equation.
1. Consider the equation xy" - 2y' + (2 - x)y = 0,x > 0. We can easily verify that y(x) = e* is a solution of the equation. Use reduction of order to determine the general solution of the equation.
 6. Suppose that, instead of boundary conditions Eqs. (2) and (3), we have u(x, o, t) -f^(r), u(r, b, t)() 0<x<a, 0<t (2') u(0,y, t)-gi(v), u(a,y,t)-89(v) 0 <y<b, o<t (3) Show that the steady-state solution involves the potential equation, and indicate how to solve it.
6. Suppose that, instead of boundary conditions Eqs. (2) and (3), we have u(x, o, t) -f^(r), u(r, b, t)() 0
6. Suppose that, instead of boundary conditions Eqs. (2) and (3), we have u(x, o, t) -f^(r), u(r, b, t)() 0<x<a, 0<t (2') u(0,y, t)-gi(v), u(a,y,t)-89(v) 0 <y<b, o<t (3) Show that the steady-state solution involves the potential equation, and indicate how to solve it.
6. Suppose that, instead of boundary conditions Eqs. (2) and (3), we have u(x, o, t) -f^(r), u(r, b, t)() 0
 use Matlab
y'=t, y0)=1, solution: y(t)=1+t/2 y' = 2(1 +1)y, y(0)=1, solution: y(t) = +24 v=5"y, y(0)=1, solution: y(t) = { y'=+/yº, y(0)=1, solution: y(t) = (31/4+1)1/3 For the IVPs above, make a log-log plot of the error of Runge-Kutta 4th order at t=1 as a function of h with h=0.1 x 2-k for 0 <k <5.
use Matlab
y'=t, y0)=1, solution: y(t)=1+t/2 y' = 2(1 +1)y, y(0)=1, solution: y(t) = +24 v=5"y, y(0)=1, solution: y(t) = { y'=+/yº, y(0)=1, solution: y(t) = (31/4+1)1/3 For the IVPs above, make a log-log plot of the error of Runge-Kutta 4th order at t=1 as a function of h with h=0.1 x 2-k for 0 <k <5.
 Let y: 1 + R2 be a regular parametrised curve which we write as y(t) = (v(t), v(t))" for some smooth maps u,v: 1 R. We assume furthermore that is never equal to zero on I. We define the surface of revolution Exy associated to y as (1) E = {r(t,0) = (v(t) cos(6), y(t) sin(0), v(0))?|tel, 0 € (0,27]} . Below, we consider the chart (U,r) obtained by taking U = I x (0,27), where the map r:U →...
Let y: 1 + R2 be a regular parametrised curve which we write as y(t) = (v(t), v(t))" for some smooth maps u,v: 1 R. We assume furthermore that is never equal to zero on I. We define the surface of revolution Exy associated to y as (1) E = {r(t,0) = (v(t) cos(6), y(t) sin(0), v(0))?|tel, 0 € (0,27]} . Below, we consider the chart (U,r) obtained by taking U = I x (0,27), where the map r:U →...
 y(t) =-=-= is the unit step output for the system ....... 0 ſo 2 31 [0] X = 0 6 5 x + u(t) 1 4 2 y = [1 2 0x :-2 0 0 0 +XI u(1) 0 -6 -1 y = [1 0 0]x; x(0) = 0 26 --- -0 O -3 0 0 -6 1 x+ (1) 0 0-5 y = [ 011]x; x(0) = 0 ed o LO 0 1 * = -12 -8 1 x...
y(t) =-=-= is the unit step output for the system ....... 0 ſo 2 31 [0] X = 0 6 5 x + u(t) 1 4 2 y = [1 2 0x :-2 0 0 0 +XI u(1) 0 -6 -1 y = [1 0 0]x; x(0) = 0 26 --- -0 O -3 0 0 -6 1 x+ (1) 0 0-5 y = [ 011]x; x(0) = 0 ed o LO 0 1 * = -12 -8 1 x...
 Given that A = 54 0 LO 3 -2 3 0] 0 has eigenvalues 11 = –2 and 12 = 4 and 4] 1 a basis for Exy is 1-2 %. 1] Choose ALL the statement(s) that are ALWAYS TRUE. = -2 are O A is NOT diagonalizable since the algebraic multiplicity and the geometric multiplicity of x different. A is NOT diagonalizable since the algebraic multiplicity and the geometric multiplicity of 12 = 4 are different. O A is...
Given that A = 54 0 LO 3 -2 3 0] 0 has eigenvalues 11 = –2 and 12 = 4 and 4] 1 a basis for Exy is 1-2 %. 1] Choose ALL the statement(s) that are ALWAYS TRUE. = -2 are O A is NOT diagonalizable since the algebraic multiplicity and the geometric multiplicity of x different. A is NOT diagonalizable since the algebraic multiplicity and the geometric multiplicity of 12 = 4 are different. O A is...
 Problem 1: Let y()- r(t+2)-r(t+1)+r(t)-r(t-1)-u(t-1)-r(t-2)+r(t-3), where r(t) is the ramp function. a) plot y(t) b) plot y'() c) Plot y(2t-3) d) calculate the energy of y(t) note: r(t) = t for t 0 and 0 for t < 0 Problem 2: Let x(t)s u(t)-u(t-2) and y(t) = t[u(t)-u(t-1)] a) b) plot x(t) and y(t) evaluate graphically and plot z(t) = x(t) * y(t) Problem 3: An LTI system has the impulse response h(t) = 5e-tu(t)-16e-2tu(t) + 13e-3t u(t) The input...
Problem 1: Let y()- r(t+2)-r(t+1)+r(t)-r(t-1)-u(t-1)-r(t-2)+r(t-3), where r(t) is the ramp function. a) plot y(t) b) plot y'() c) Plot y(2t-3) d) calculate the energy of y(t) note: r(t) = t for t 0 and 0 for t < 0 Problem 2: Let x(t)s u(t)-u(t-2) and y(t) = t[u(t)-u(t-1)] a) b) plot x(t) and y(t) evaluate graphically and plot z(t) = x(t) * y(t) Problem 3: An LTI system has the impulse response h(t) = 5e-tu(t)-16e-2tu(t) + 13e-3t u(t) The input...
 Question 5 [3+(2+4) marks] (a) The matrix A has a repeated eigenvalue of 1 = 2. During the solution of the solution (A-21)X = 0, the augmented matrix below appears. Find a basis for the eigenspace for this eigenvalue. Ti 0 -2 07 lo o o lo To ooo (b) (i) Show that if T(x) is a linear transformation from R" to R", that T(0) is the zero vector. (i) Assume that T(u) = 0 only when u = 0....
Question 5 [3+(2+4) marks] (a) The matrix A has a repeated eigenvalue of 1 = 2. During the solution of the solution (A-21)X = 0, the augmented matrix below appears. Find a basis for the eigenspace for this eigenvalue. Ti 0 -2 07 lo o o lo To ooo (b) (i) Show that if T(x) is a linear transformation from R" to R", that T(0) is the zero vector. (i) Assume that T(u) = 0 only when u = 0....
 (24%) Find the Fourier transform of the signals given below: 1) x() 4e U() x(t) = e-3,Cos(12m)U(t) 2) x(t) = 36(1 + 4) + 26(1) + 43(1-5) 3) x[n]=(0.7)"U(n) 4)
(24%) Find the Fourier transform of the signals given below: 1) x() 4e U() x(t) = e-3,Cos(12m)U(t) 2) x(t) = 36(1 + 4) + 26(1) + 43(1-5) 3) x[n]=(0.7)"U(n) 4)
(24%) Find the Fourier transform of the signals given below: 1) x() 4e U() x(t) = e-3,Cos(12m)U(t) 2) x(t) = 36(1 + 4) + 26(1) + 43(1-5) 3) x[n]=(0.7)"U(n) 4)
(24%) Find the Fourier transform of the signals given below: 1) x() 4e U() x(t) = e-3,Cos(12m)U(t) 2) x(t) = 36(1 + 4) + 26(1) + 43(1-5) 3) x[n]=(0.7)"U(n) 4)
 5s , y s-t to compute the (1 pt) In this problem we use the change of variables x integral(xy) dA, where R is the parallelogram formed by (0, 0), (5,1), (8, -2), and (3, -3) д(х, у) д(s,t) First find the magnitude of the Jacobian, ,b = Then, with a = and d с 3 b JRC+y) dA = ) dt ds =
5s , y s-t to compute the (1 pt) In this problem we use the change of variables x integral(xy) dA, where R is the parallelogram formed by (0, 0), (5,1), (8, -2), and (3, -3) д(х, у) д(s,t) First find the magnitude of the Jacobian, ,b = Then, with a = and d с 3 b JRC+y) dA = ) dt ds =
 1. Consider the equation xy" - 2y' + (2 - x)y = 0,x > 0. We can easily verify that y(x) = e* is a solution of the equation. Use reduction of order to determine the general solution of the equation.
1. Consider the equation xy" - 2y' + (2 - x)y = 0,x > 0. We can easily verify that y(x) = e* is a solution of the equation. Use reduction of order to determine the general solution of the equation.
Most questions answered within 3 hours.
-
You are attempting to calculate a firm’s free cash flow to
equity. You know the following...
asked 29 minutes ago -
the following reaction occurs in a balloon containing
N2O2 gas
N2O4(g)=2NO2(g)
will the volume of the...
asked 1 hour ago -
answer the questions throughout this program
public class Day implements Comparable {
Private Boolean atWork;...
asked 1 hour ago -
This is C++ code for parking fee management program
#include <iostream>
#include <iomanip>
using namespace std;...
asked 1 hour ago -
The free energy change for the following reaction at 25 °C, when
[Sn2+] = 1.17 M...
asked 3 hours ago -
An MNE is this kind of industry when competition in one country
is essentially independent of...
asked 4 hours ago -
. For this set of questions, determine what
proportion of a normal distribution is located betweeneach...
asked 5 hours ago -
A college student is employed as a door-to-door newspaper
salesman. Historical data suggests that the student...
asked 6 hours ago -
MATLAB HW 11 problem using Switch Case and Input commands
Write a script file that calculates...
asked 5 hours ago -
Considering gravitational time dilation, calculate the time that
passes in Earth’s surface while 1 hour passes...
asked 6 hours ago -
Minitab Problem: Take the Lake Hume June rainfall data and find
use the processes outlined in...
asked 7 hours ago -
X Company is trying to decide whether to continue using old
equipment to make Product A...
asked 7 hours ago