The Class Name is: MAE 318 System Dynamics and Control I
Homework Answers

![[t.ct4叶4t)t kk]s arabou SC](http://img.homeworklib.com/images/7869c831-5056-48c3-a771-776b6495aa74.png?x-oss-process=image/resize,w_560)
Add Answer to:
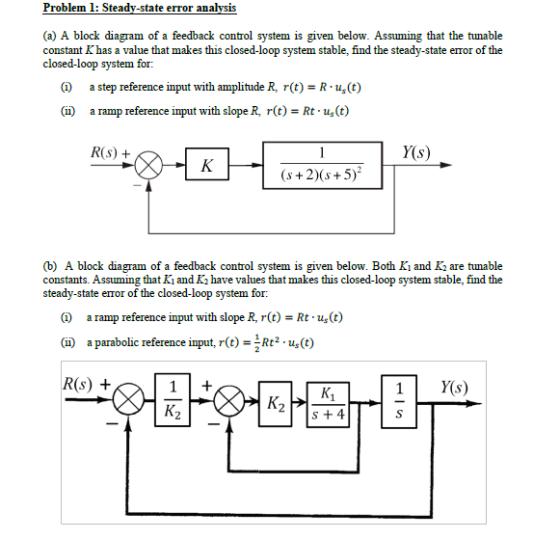
Problem 1: Steady-state error analvsis (a) A block diagram of a feedback control system is given ...
Problem 51: (25 points) Figure 5 is an example of a feedback control system that is designed to r...
 Problem 51: (25 points) Figure 5 is an example of a feedback control system that is designed to regulate the angular position θ(t) of a motor shaft to a desired value θr(t). The signal e(t) represents the error between the measured shaft angle θ(t) and the desired shaft angle θ (t). The Laplace transforms ofa,(t), θ(t), and e(t) are denoted as ΘR(s), θ(s), and E(s), respectively. The control gains Ki and K2 are chosen by the control engineer to achieve...
Problem 51: (25 points) Figure 5 is an example of a feedback control system that is designed to regulate the angular position θ(t) of a motor shaft to a desired value θr(t). The signal e(t) represents the error between the measured shaft angle θ(t) and the desired shaft angle θ (t). The Laplace transforms ofa,(t), θ(t), and e(t) are denoted as ΘR(s), θ(s), and E(s), respectively. The control gains Ki and K2 are chosen by the control engineer to achieve...
For the feedback control system shown to the right: Find the steady state error with respect...
 For the feedback control system shown to the right: Find the steady state error with respect to the reference input and the disturbance for step, ramp, and parabolic inputs. Assume the inputs are 2s2 +3s+3 Equation Input Ste Ramp Parabolic H(s) = 1 r(t) = w(t) = 4t2 a. find the error to a step, ramp and parabolic input (reference input) b. find the error to a step. ramp and parabolic input (disturbance input)
For the feedback control system shown to the right: Find the steady state error with respect to the reference input and the disturbance for step, ramp, and parabolic inputs. Assume the inputs are 2s2 +3s+3 Equation Input Ste Ramp Parabolic H(s) = 1 r(t) = w(t) = 4t2 a. find the error to a step, ramp and parabolic input (reference input) b. find the error to a step. ramp and parabolic input (disturbance input)
pleas show all work thank you Disturbance D(s) Reference Control Output Input Error Input t US) Y(s) Plant Given the above closed loop block diagram: Let aundl s) KK (a) Show that the above system wil...
 pleas show all work thank you
Disturbance D(s) Reference Control Output Input Error Input t US) Y(s) Plant Given the above closed loop block diagram: Let aundl s) KK (a) Show that the above system will have zero steady state error for step reference input (when D(s)-0) as well as for step disturbance input (when R(s)-0). (b) LetJ B K1 and Kp0, what about the stability of the closed loop system?
Disturbance D(s) Reference Control Output Input Error Input t...
pleas show all work thank you
Disturbance D(s) Reference Control Output Input Error Input t US) Y(s) Plant Given the above closed loop block diagram: Let aundl s) KK (a) Show that the above system will have zero steady state error for step reference input (when D(s)-0) as well as for step disturbance input (when R(s)-0). (b) LetJ B K1 and Kp0, what about the stability of the closed loop system?
Disturbance D(s) Reference Control Output Input Error Input t...
Consider the closed loop system defined by the following block diagram. a) Compute the transfer function...
 Consider the closed loop system defined by the following block diagram. a) Compute the transfer function E(s)/R(s). b) Determine the steady state error for a unit-step 1. Controller ant Itly Ro- +- HI- 4단Toy , c) d) e) reference input signal. Determine the steady state error response for a unit-ramp reference input signal. Determine the locations of the closed loop poles of the system. Select system parameters kp and ki in terms of k so that damping coefficient V2/2 and...
Consider the closed loop system defined by the following block diagram. a) Compute the transfer function E(s)/R(s). b) Determine the steady state error for a unit-step 1. Controller ant Itly Ro- +- HI- 4단Toy , c) d) e) reference input signal. Determine the steady state error response for a unit-ramp reference input signal. Determine the locations of the closed loop poles of the system. Select system parameters kp and ki in terms of k so that damping coefficient V2/2 and...
2. A feedback control system is subject to disturbances at the actuator input, as shown in the following block diagram. Remember that you need to use the final value theorem (and not the table) when...
 2. A feedback control system is subject to disturbances at the actuator input, as shown in the following block diagram. Remember that you need to use the final value theorem (and not the table) when dealing with any other input other than the reference. See the last 3 pages, 12-15, of my steady-state error lecture notes for examples on how to deal with disturbance rather than reference inputs D(s) 1 Y(s) $3+2s2+2s If the reference command is r(t) 1S 0,...
2. A feedback control system is subject to disturbances at the actuator input, as shown in the following block diagram. Remember that you need to use the final value theorem (and not the table) when dealing with any other input other than the reference. See the last 3 pages, 12-15, of my steady-state error lecture notes for examples on how to deal with disturbance rather than reference inputs D(s) 1 Y(s) $3+2s2+2s If the reference command is r(t) 1S 0,...
Consider the closed loop system a) Design a PD controller (that is, calculate K1 and K2) such that the system is stable and the steady-state error for the input r (t) = unity ramp let less than or equal to 0.02. b) Select a value from K1 and K2 and build
 Consider the closed loop systema) Design a PD controller (that is, calculate K1 and K2) such that the system isstable and the steady-state error for the input r (t) = unity ramp letless than or equal to 0.02.b) Select a value from K1 and K2 and build the model in Simulink or solutionanalytical to obtain the response of the system to the magnitude rampr (t) = 2t.c) Graph the answer
Consider the closed loop systema) Design a PD controller (that is, calculate K1 and K2) such that the system isstable and the steady-state error for the input r (t) = unity ramp letless than or equal to 0.02.b) Select a value from K1 and K2 and build the model in Simulink or solutionanalytical to obtain the response of the system to the magnitude rampr (t) = 2t.c) Graph the answer
A unity feedback system is shown in Fig. 1. The closed-loop transfer function ?(?) of this...
 A unity feedback system is shown in Fig. 1. The closed-loop
transfer function ?(?) of this system is given as
?(?)=?1?4+2?3+(?2+1)?2+?2?+?1.
a) (20%) Using Routh-Hurwitz criteria, find expression (in
terms of ?1 and ?2) and range of value of ?1 and ?2 such that the
above system is stable.
b) (4%) It is desired to achieve steady-state error of less
than 0.3 with a unit ramp input. Find an additional constrain in
terms of ?1 and ?2 such that the...
A unity feedback system is shown in Fig. 1. The closed-loop
transfer function ?(?) of this system is given as
?(?)=?1?4+2?3+(?2+1)?2+?2?+?1.
a) (20%) Using Routh-Hurwitz criteria, find expression (in
terms of ?1 and ?2) and range of value of ?1 and ?2 such that the
above system is stable.
b) (4%) It is desired to achieve steady-state error of less
than 0.3 with a unit ramp input. Find an additional constrain in
terms of ?1 and ?2 such that the...
Spring 2019 3. Given a closed-loop control system with unity feedback is shown in the block...
 Spring 2019 3. Given a closed-loop control system with unity feedback is shown in the block diagram. G(s) is the open-loop transfer function, and the controller is a gain, K. 1. (20) Calculate the open-loop transfer function tar →Q--t G(s) (10) Calculate the steady-state error to a step input of the open-loop system. 7. (in Bode Form) from the Bode plot. (10) Calculate the shortest possible settling time with a percentage overshoot of 5% or less. 8. 2. (10)Plot the...
Spring 2019 3. Given a closed-loop control system with unity feedback is shown in the block diagram. G(s) is the open-loop transfer function, and the controller is a gain, K. 1. (20) Calculate the open-loop transfer function tar →Q--t G(s) (10) Calculate the steady-state error to a step input of the open-loop system. 7. (in Bode Form) from the Bode plot. (10) Calculate the shortest possible settling time with a percentage overshoot of 5% or less. 8. 2. (10)Plot the...
Find the steady state error constants and the steady-state error response for the digital control system...
 Find the steady state error constants and the steady-state error response for the digital control system shown below, if the inputs are: a. Unit Step, u(t) b. Unit Ramp, t u(t) c. Unit Parabola, 0.5t2u(t) 2. R(s) + C(s) s(s 2) T=0.1
Find the steady state error constants and the steady-state error response for the digital control system shown below, if the inputs are: a. Unit Step, u(t) b. Unit Ramp, t u(t) c. Unit Parabola, 0.5t2u(t) 2. R(s) + C(s) s(s 2) T=0.1
5, (29%) Consider the feedback control system in Figure-5 in block diagram form. The reference input...
 5, (29%) Consider the feedback control system in Figure-5 in block diagram form. The reference input R(s), system output Y(s), and disturbance D(s) are denoted along with the error E(s) and control effort F(s). You will design the control law Gc(s) to achieve certain performance criteria. Answer the following questions (assume D(s)0 in all parts except part(ü) (a) [396] Show that the transfer function relating the reference R(s) to the output Y(s) is given by (b) [3%) Assuming a proportional...
5, (29%) Consider the feedback control system in Figure-5 in block diagram form. The reference input R(s), system output Y(s), and disturbance D(s) are denoted along with the error E(s) and control effort F(s). You will design the control law Gc(s) to achieve certain performance criteria. Answer the following questions (assume D(s)0 in all parts except part(ü) (a) [396] Show that the transfer function relating the reference R(s) to the output Y(s) is given by (b) [3%) Assuming a proportional...
 Problem 51: (25 points) Figure 5 is an example of a feedback control system that is designed to regulate the angular position θ(t) of a motor shaft to a desired value θr(t). The signal e(t) represents the error between the measured shaft angle θ(t) and the desired shaft angle θ (t). The Laplace transforms ofa,(t), θ(t), and e(t) are denoted as ΘR(s), θ(s), and E(s), respectively. The control gains Ki and K2 are chosen by the control engineer to achieve...
Problem 51: (25 points) Figure 5 is an example of a feedback control system that is designed to regulate the angular position θ(t) of a motor shaft to a desired value θr(t). The signal e(t) represents the error between the measured shaft angle θ(t) and the desired shaft angle θ (t). The Laplace transforms ofa,(t), θ(t), and e(t) are denoted as ΘR(s), θ(s), and E(s), respectively. The control gains Ki and K2 are chosen by the control engineer to achieve...
 For the feedback control system shown to the right: Find the steady state error with respect to the reference input and the disturbance for step, ramp, and parabolic inputs. Assume the inputs are 2s2 +3s+3 Equation Input Ste Ramp Parabolic H(s) = 1 r(t) = w(t) = 4t2 a. find the error to a step, ramp and parabolic input (reference input) b. find the error to a step. ramp and parabolic input (disturbance input)
For the feedback control system shown to the right: Find the steady state error with respect to the reference input and the disturbance for step, ramp, and parabolic inputs. Assume the inputs are 2s2 +3s+3 Equation Input Ste Ramp Parabolic H(s) = 1 r(t) = w(t) = 4t2 a. find the error to a step, ramp and parabolic input (reference input) b. find the error to a step. ramp and parabolic input (disturbance input)
 pleas show all work thank you
Disturbance D(s) Reference Control Output Input Error Input t US) Y(s) Plant Given the above closed loop block diagram: Let aundl s) KK (a) Show that the above system will have zero steady state error for step reference input (when D(s)-0) as well as for step disturbance input (when R(s)-0). (b) LetJ B K1 and Kp0, what about the stability of the closed loop system?
Disturbance D(s) Reference Control Output Input Error Input t...
pleas show all work thank you
Disturbance D(s) Reference Control Output Input Error Input t US) Y(s) Plant Given the above closed loop block diagram: Let aundl s) KK (a) Show that the above system will have zero steady state error for step reference input (when D(s)-0) as well as for step disturbance input (when R(s)-0). (b) LetJ B K1 and Kp0, what about the stability of the closed loop system?
Disturbance D(s) Reference Control Output Input Error Input t...
 Consider the closed loop system defined by the following block diagram. a) Compute the transfer function E(s)/R(s). b) Determine the steady state error for a unit-step 1. Controller ant Itly Ro- +- HI- 4단Toy , c) d) e) reference input signal. Determine the steady state error response for a unit-ramp reference input signal. Determine the locations of the closed loop poles of the system. Select system parameters kp and ki in terms of k so that damping coefficient V2/2 and...
Consider the closed loop system defined by the following block diagram. a) Compute the transfer function E(s)/R(s). b) Determine the steady state error for a unit-step 1. Controller ant Itly Ro- +- HI- 4단Toy , c) d) e) reference input signal. Determine the steady state error response for a unit-ramp reference input signal. Determine the locations of the closed loop poles of the system. Select system parameters kp and ki in terms of k so that damping coefficient V2/2 and...
 2. A feedback control system is subject to disturbances at the actuator input, as shown in the following block diagram. Remember that you need to use the final value theorem (and not the table) when dealing with any other input other than the reference. See the last 3 pages, 12-15, of my steady-state error lecture notes for examples on how to deal with disturbance rather than reference inputs D(s) 1 Y(s) $3+2s2+2s If the reference command is r(t) 1S 0,...
2. A feedback control system is subject to disturbances at the actuator input, as shown in the following block diagram. Remember that you need to use the final value theorem (and not the table) when dealing with any other input other than the reference. See the last 3 pages, 12-15, of my steady-state error lecture notes for examples on how to deal with disturbance rather than reference inputs D(s) 1 Y(s) $3+2s2+2s If the reference command is r(t) 1S 0,...
 A unity feedback system is shown in Fig. 1. The closed-loop
transfer function ?(?) of this system is given as
?(?)=?1?4+2?3+(?2+1)?2+?2?+?1.
a) (20%) Using Routh-Hurwitz criteria, find expression (in
terms of ?1 and ?2) and range of value of ?1 and ?2 such that the
above system is stable.
b) (4%) It is desired to achieve steady-state error of less
than 0.3 with a unit ramp input. Find an additional constrain in
terms of ?1 and ?2 such that the...
A unity feedback system is shown in Fig. 1. The closed-loop
transfer function ?(?) of this system is given as
?(?)=?1?4+2?3+(?2+1)?2+?2?+?1.
a) (20%) Using Routh-Hurwitz criteria, find expression (in
terms of ?1 and ?2) and range of value of ?1 and ?2 such that the
above system is stable.
b) (4%) It is desired to achieve steady-state error of less
than 0.3 with a unit ramp input. Find an additional constrain in
terms of ?1 and ?2 such that the...
 Spring 2019 3. Given a closed-loop control system with unity feedback is shown in the block diagram. G(s) is the open-loop transfer function, and the controller is a gain, K. 1. (20) Calculate the open-loop transfer function tar →Q--t G(s) (10) Calculate the steady-state error to a step input of the open-loop system. 7. (in Bode Form) from the Bode plot. (10) Calculate the shortest possible settling time with a percentage overshoot of 5% or less. 8. 2. (10)Plot the...
Spring 2019 3. Given a closed-loop control system with unity feedback is shown in the block diagram. G(s) is the open-loop transfer function, and the controller is a gain, K. 1. (20) Calculate the open-loop transfer function tar →Q--t G(s) (10) Calculate the steady-state error to a step input of the open-loop system. 7. (in Bode Form) from the Bode plot. (10) Calculate the shortest possible settling time with a percentage overshoot of 5% or less. 8. 2. (10)Plot the...
 Find the steady state error constants and the steady-state error response for the digital control system shown below, if the inputs are: a. Unit Step, u(t) b. Unit Ramp, t u(t) c. Unit Parabola, 0.5t2u(t) 2. R(s) + C(s) s(s 2) T=0.1
Find the steady state error constants and the steady-state error response for the digital control system shown below, if the inputs are: a. Unit Step, u(t) b. Unit Ramp, t u(t) c. Unit Parabola, 0.5t2u(t) 2. R(s) + C(s) s(s 2) T=0.1
 5, (29%) Consider the feedback control system in Figure-5 in block diagram form. The reference input R(s), system output Y(s), and disturbance D(s) are denoted along with the error E(s) and control effort F(s). You will design the control law Gc(s) to achieve certain performance criteria. Answer the following questions (assume D(s)0 in all parts except part(ü) (a) [396] Show that the transfer function relating the reference R(s) to the output Y(s) is given by (b) [3%) Assuming a proportional...
5, (29%) Consider the feedback control system in Figure-5 in block diagram form. The reference input R(s), system output Y(s), and disturbance D(s) are denoted along with the error E(s) and control effort F(s). You will design the control law Gc(s) to achieve certain performance criteria. Answer the following questions (assume D(s)0 in all parts except part(ü) (a) [396] Show that the transfer function relating the reference R(s) to the output Y(s) is given by (b) [3%) Assuming a proportional...
Most questions answered within 3 hours.
-
The equilibrium constant, K, for the following reaction is
1.29×10-2 at 600
K.
COCl2(g) --->
CO(g)...
asked 7 minutes ago -
It is known that 72% of people have a favorable opinion of their
local police force....
asked 10 minutes ago -
A vertical straight wire carrying an upward 26-A current exerts
an attractive force per unit length...
asked 23 minutes ago -
For the purposes of this assignment, you are to choose an
adaptive trait common to more...
asked 32 minutes ago -
Two identical flutes can play middle C (262 Hz) at 20◦C. How
many beats per second...
asked 40 minutes ago -
Potassium phosphate and calcium chloride react in a double
replacement reaction. To produce 1.0 moles of...
asked 35 minutes ago -
Sparky, Co. purchased land as a factory site for $600,000.
Sparky paid $42,000 to tear down...
asked 49 minutes ago -
A Chi-square distribution with 14 degrees of freedom is a
correct model for
Question 8 options:...
asked 1 hour ago -
In a group of 45 mice, there are 10 that have a certain genetic
character. suppose...
asked 1 hour ago -
Topic: Hydrogenic Atoms
The wavefunction of one of the d orbitals is proportional to sin
θ...
asked 1 hour ago -
6. Suppose that the Bank of Canada conducts an open market
purchase of $2000 from a...
asked 1 hour ago -
A) Suppose U=X∙Y3. Find X* and Y*.
B) Suppose U=X3∙Y. Find X* and Y*.
C) Suppose...
asked 1 hour ago