1. Carefully write the following: (a) Suppose A is a 3 × 3 matrix that you can diagonalised, expl...
1. Carefully write the following:
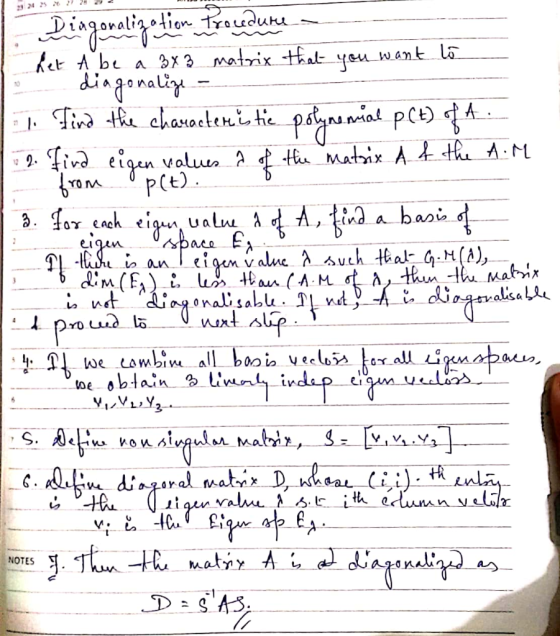
(a) Suppose A is a 3 × 3 matrix that you can diagonalised, explain how you would diagonalise A. (1 mark)
(b) Give an example of two unbounded functions f : (−1, 1) → R and g : (−1, 1) → R such that f + g is bounded and L-Lipschitz for every L > 0. (1 mark)
(c) The definition of sup(A) and the definition of f : (0, T) × Ω → R being bounded and being L-Lipschitz in the second variable. (1 mark)
(d) Explain why the Picard iterates satisfy x1 = xk for all k > 2 if we consider an IVP for x ∈ C1 ([0, T]; R) with the DE x'(t) = g(t) for some continuous function g : (0, T) → R. (1 mark)
Part (d) please
Homework Answers
Given that
we have to
1. Carefully write the following:
(a) Suppose A is a 3 × 3 matrix that you can diagonalised, explain how you would diagonalise A. (1 mark)
(b) Give an example of two unbounded functions f : (−1, 1) → R and g : (−1, 1) → R such that f + g is bounded and L-Lipschitz for every L > 0. (1 mark)
(c) The definition of sup(A) and the definition of f : (0, T) × Ω → R being bounded and being L-Lipschitz in the second variable. (1 mark)
(d) Explain why the Picard iterates satisfy x1 = xk for all k > 2 if we consider an IVP for x ∈ C1 ([0, T]; R) with the DE x'(t) = g(t) for some continuous function g : (0, T) → R. (1 mark)


Add Answer to:
1. Carefully write the following: (a) Suppose A is a 3 × 3 matrix that you can diagonalised, expl...
1. Carefully write the following: (a) Suppose A is a 3 × 3 matrix that you...
1. Carefully write the following: (a) Suppose A is a 3 × 3 matrix that you can diagonalised, explain how you would diagonalise A. (1 mark) (b) Give an example of two unbounded functions f : (−1, 1) → R and g : (−1, 1) → R such that f + g is bounded and L-Lipschitz for every L > 0. (1 mark) (c) The definition of sup(A) and the definition of f : (0, T) × Ω → R...
5. Let y E C2([0, T]; R), T > 0 satisfy y"(t) = 피t, y(0) = y'(0) = 0 e R. Use Picard-Lindelöf 1+...
 5. Let y E C2([0, T]; R), T > 0 satisfy y"(t) = 피t, y(0) = y'(0) = 0 e R. Use Picard-Lindelöf 1+t' to prove that a unique solution to the IVP exists for short time, as follows: (a) Let b E R2, A E M2 (R) . Show that any function g : R2 -R2.9(x) = Ax+b is Lipschitz. 1 mark (b) Transform the DE for y into a(t) Az(t) +b(t) for a suitable z, A, b. 2...
5. Let y E C2([0, T]; R), T > 0 satisfy y"(t) = 피t, y(0) = y'(0) = 0 e R. Use Picard-Lindelöf 1+t' to prove that a unique solution to the IVP exists for short time, as follows: (a) Let b E R2, A E M2 (R) . Show that any function g : R2 -R2.9(x) = Ax+b is Lipschitz. 1 mark (b) Transform the DE for y into a(t) Az(t) +b(t) for a suitable z, A, b. 2...
B2. (a) Let I denote the interval 0,1 and let C denote the space of continuous functions I-R. Def...
 B2. (a) Let I denote the interval 0,1 and let C denote the space of continuous functions I-R. Define dsup(f,g)-sup |f(t)-g(t) and di(f.g)f (t)- g(t)ldt (f,g E C) tEI (i) Prove that dsup is a metric on C (ii) Prove that di is a metric on C. (You may use any standard properties of continuous functions and integrals, provided you make your reasoning clear.) 6 i) Let 1 denote the constant function on I with value 1. Give an explicit...
B2. (a) Let I denote the interval 0,1 and let C denote the space of continuous functions I-R. Define dsup(f,g)-sup |f(t)-g(t) and di(f.g)f (t)- g(t)ldt (f,g E C) tEI (i) Prove that dsup is a metric on C (ii) Prove that di is a metric on C. (You may use any standard properties of continuous functions and integrals, provided you make your reasoning clear.) 6 i) Let 1 denote the constant function on I with value 1. Give an explicit...
Question 1 1. [5 pts] Give a complete definition of lim f(x) = -oo if... 2....
 Question 1
1. [5 pts] Give a complete definition of lim f(x) = -oo if... 2. [25 pts] Give an example of each of the following, or state one or more theorems which show that such an example is impossible: a. A countable collection of nonempty closed proper subsets of R whose union is open. b. A nonempty bounded subset of R with no cluster points. c. A convergent sequence with two convergent subsequences with distinct limits. d. A function...
Question 1
1. [5 pts] Give a complete definition of lim f(x) = -oo if... 2. [25 pts] Give an example of each of the following, or state one or more theorems which show that such an example is impossible: a. A countable collection of nonempty closed proper subsets of R whose union is open. b. A nonempty bounded subset of R with no cluster points. c. A convergent sequence with two convergent subsequences with distinct limits. d. A function...
(5) Let f: [0, 1 R. We say that f is Hölder continuous of order a e (0,1) if \f(x) -- f(y)| . , y sup [0, 1] with 2 # 1...
 (5) Let f: [0, 1 R. We say that f is Hölder continuous of order a e (0,1) if \f(x) -- f(y)| . , y sup [0, 1] with 2 # 1£l\c° sup is finite. We define Co ((0, 1]) f: [0, 1] -R: f is Hölder continuous of order a}. = (a) For f,gE C ([0, 1]) define da(f,g) = ||f-9||c«. Prove that da is a well-defined metric Ca((0, 1) (b) Prove that (C ([0, 1]), da) is complete...
(5) Let f: [0, 1 R. We say that f is Hölder continuous of order a e (0,1) if \f(x) -- f(y)| . , y sup [0, 1] with 2 # 1£l\c° sup is finite. We define Co ((0, 1]) f: [0, 1] -R: f is Hölder continuous of order a}. = (a) For f,gE C ([0, 1]) define da(f,g) = ||f-9||c«. Prove that da is a well-defined metric Ca((0, 1) (b) Prove that (C ([0, 1]), da) is complete...
Problem 11.11 I have included a picture of the question (and the referenced problem 11.5), followed...
 Problem 11.11
I have included a picture of the question (and the referenced
problem 11.5), followed by definitions and theorems so you're able
to use this books particular language. The information I include
ranges from basic definitions to the fundamental theorems of
calculus.
Problem 11.11. Show, if f : [0,1] → R is bounded and the lower integral of f is positive, then there is an open interval on which f > 0. (Compare with problems 11.5 above and Problem...
Problem 11.11
I have included a picture of the question (and the referenced
problem 11.5), followed by definitions and theorems so you're able
to use this books particular language. The information I include
ranges from basic definitions to the fundamental theorems of
calculus.
Problem 11.11. Show, if f : [0,1] → R is bounded and the lower integral of f is positive, then there is an open interval on which f > 0. (Compare with problems 11.5 above and Problem...
(b) Let f 0, 1-R be a C2 function and let g, h: [0, 00)-R be C1. Consider the initial-boundary value problem kwr w(...
 (b) Let f 0, 1-R be a C2 function and let g, h: [0, 00)-R be C1. Consider the initial-boundary value problem kwr w(r, 0) f(a) w(0, t) g(t) w(1, t) h(t) for a function w: [0,1 x [0, 0)- R such that w, wn, and wa exist and are continuous. Show that the solution to this problem is unique, that is, if w1 and w2 [0, 1] x [0, 00)- R both satisfy these conditions, then w1 = w2....
(b) Let f 0, 1-R be a C2 function and let g, h: [0, 00)-R be C1. Consider the initial-boundary value problem kwr w(r, 0) f(a) w(0, t) g(t) w(1, t) h(t) for a function w: [0,1 x [0, 0)- R such that w, wn, and wa exist and are continuous. Show that the solution to this problem is unique, that is, if w1 and w2 [0, 1] x [0, 00)- R both satisfy these conditions, then w1 = w2....
Exercise 3.1.12: Prove Proposition 3.1.17. Exercise 3.1.13: Suppose SCR and c is a cluster point of...
 Exercise 3.1.12: Prove Proposition 3.1.17. Exercise 3.1.13: Suppose SCR and c is a cluster point of S. Suppose : S R is bounded. Show that there exists a sequence {x} with X, ES\{c} and lim X e such thar S(x)} converges. and g such thal 2 2 asli and 8 ) Las y C2, bulg 1)) does not go lo L as is, find x → Exercise 3.1.15: Show that the condition of being a cluster point is necessary to...
Exercise 3.1.12: Prove Proposition 3.1.17. Exercise 3.1.13: Suppose SCR and c is a cluster point of S. Suppose : S R is bounded. Show that there exists a sequence {x} with X, ES\{c} and lim X e such thar S(x)} converges. and g such thal 2 2 asli and 8 ) Las y C2, bulg 1)) does not go lo L as is, find x → Exercise 3.1.15: Show that the condition of being a cluster point is necessary to...
Both part of the question is True or False. Thank you Problem 1. (ref. Example 3...
 Both part of the question is True or False. Thank you
Problem 1. (ref. Example 3 in the slide) Let X = Y = C[0, 1] (with the norm || ||C[0,1] = sup |u(x)]). For any u € C[0, 1], define T€[0,1] v(t) = u(s)ds. We denote by T the mapping from u to v with D(T) = C[0, 1], i.e., v(t) = Tu(t). Then, the following conditions are true or not? Example 3. We denote by the set of...
Both part of the question is True or False. Thank you
Problem 1. (ref. Example 3 in the slide) Let X = Y = C[0, 1] (with the norm || ||C[0,1] = sup |u(x)]). For any u € C[0, 1], define T€[0,1] v(t) = u(s)ds. We denote by T the mapping from u to v with D(T) = C[0, 1], i.e., v(t) = Tu(t). Then, the following conditions are true or not? Example 3. We denote by the set of...
Problem 3. (1) Let H be a Hilbert space and S, TE B(HH). Then, prove that...
 Problem 3. (1) Let H be a Hilbert space and S, TE B(HH). Then, prove that ||ST|| ||||||||| (2) Let X, Y be Hilbert spaces and Te B(X,Y). Then, prove that ||1||| sup ||T3|1 TEX=1 Let X, Y be Banach spaces. Definition (review) We denote by B(X, Y) a set of all bounded linear operators T:X + Y with D(T) = X. B(X, Y) is a vector space. Definition (review) A linear operator T:X + Y is said to be...
Problem 3. (1) Let H be a Hilbert space and S, TE B(HH). Then, prove that ||ST|| ||||||||| (2) Let X, Y be Hilbert spaces and Te B(X,Y). Then, prove that ||1||| sup ||T3|1 TEX=1 Let X, Y be Banach spaces. Definition (review) We denote by B(X, Y) a set of all bounded linear operators T:X + Y with D(T) = X. B(X, Y) is a vector space. Definition (review) A linear operator T:X + Y is said to be...
 5. Let y E C2([0, T]; R), T > 0 satisfy y"(t) = 피t, y(0) = y'(0) = 0 e R. Use Picard-Lindelöf 1+t' to prove that a unique solution to the IVP exists for short time, as follows: (a) Let b E R2, A E M2 (R) . Show that any function g : R2 -R2.9(x) = Ax+b is Lipschitz. 1 mark (b) Transform the DE for y into a(t) Az(t) +b(t) for a suitable z, A, b. 2...
5. Let y E C2([0, T]; R), T > 0 satisfy y"(t) = 피t, y(0) = y'(0) = 0 e R. Use Picard-Lindelöf 1+t' to prove that a unique solution to the IVP exists for short time, as follows: (a) Let b E R2, A E M2 (R) . Show that any function g : R2 -R2.9(x) = Ax+b is Lipschitz. 1 mark (b) Transform the DE for y into a(t) Az(t) +b(t) for a suitable z, A, b. 2...
 B2. (a) Let I denote the interval 0,1 and let C denote the space of continuous functions I-R. Define dsup(f,g)-sup |f(t)-g(t) and di(f.g)f (t)- g(t)ldt (f,g E C) tEI (i) Prove that dsup is a metric on C (ii) Prove that di is a metric on C. (You may use any standard properties of continuous functions and integrals, provided you make your reasoning clear.) 6 i) Let 1 denote the constant function on I with value 1. Give an explicit...
B2. (a) Let I denote the interval 0,1 and let C denote the space of continuous functions I-R. Define dsup(f,g)-sup |f(t)-g(t) and di(f.g)f (t)- g(t)ldt (f,g E C) tEI (i) Prove that dsup is a metric on C (ii) Prove that di is a metric on C. (You may use any standard properties of continuous functions and integrals, provided you make your reasoning clear.) 6 i) Let 1 denote the constant function on I with value 1. Give an explicit...
 Question 1
1. [5 pts] Give a complete definition of lim f(x) = -oo if... 2. [25 pts] Give an example of each of the following, or state one or more theorems which show that such an example is impossible: a. A countable collection of nonempty closed proper subsets of R whose union is open. b. A nonempty bounded subset of R with no cluster points. c. A convergent sequence with two convergent subsequences with distinct limits. d. A function...
Question 1
1. [5 pts] Give a complete definition of lim f(x) = -oo if... 2. [25 pts] Give an example of each of the following, or state one or more theorems which show that such an example is impossible: a. A countable collection of nonempty closed proper subsets of R whose union is open. b. A nonempty bounded subset of R with no cluster points. c. A convergent sequence with two convergent subsequences with distinct limits. d. A function...
 (5) Let f: [0, 1 R. We say that f is Hölder continuous of order a e (0,1) if \f(x) -- f(y)| . , y sup [0, 1] with 2 # 1£l\c° sup is finite. We define Co ((0, 1]) f: [0, 1] -R: f is Hölder continuous of order a}. = (a) For f,gE C ([0, 1]) define da(f,g) = ||f-9||c«. Prove that da is a well-defined metric Ca((0, 1) (b) Prove that (C ([0, 1]), da) is complete...
(5) Let f: [0, 1 R. We say that f is Hölder continuous of order a e (0,1) if \f(x) -- f(y)| . , y sup [0, 1] with 2 # 1£l\c° sup is finite. We define Co ((0, 1]) f: [0, 1] -R: f is Hölder continuous of order a}. = (a) For f,gE C ([0, 1]) define da(f,g) = ||f-9||c«. Prove that da is a well-defined metric Ca((0, 1) (b) Prove that (C ([0, 1]), da) is complete...
 Problem 11.11
I have included a picture of the question (and the referenced
problem 11.5), followed by definitions and theorems so you're able
to use this books particular language. The information I include
ranges from basic definitions to the fundamental theorems of
calculus.
Problem 11.11. Show, if f : [0,1] → R is bounded and the lower integral of f is positive, then there is an open interval on which f > 0. (Compare with problems 11.5 above and Problem...
Problem 11.11
I have included a picture of the question (and the referenced
problem 11.5), followed by definitions and theorems so you're able
to use this books particular language. The information I include
ranges from basic definitions to the fundamental theorems of
calculus.
Problem 11.11. Show, if f : [0,1] → R is bounded and the lower integral of f is positive, then there is an open interval on which f > 0. (Compare with problems 11.5 above and Problem...
 (b) Let f 0, 1-R be a C2 function and let g, h: [0, 00)-R be C1. Consider the initial-boundary value problem kwr w(r, 0) f(a) w(0, t) g(t) w(1, t) h(t) for a function w: [0,1 x [0, 0)- R such that w, wn, and wa exist and are continuous. Show that the solution to this problem is unique, that is, if w1 and w2 [0, 1] x [0, 00)- R both satisfy these conditions, then w1 = w2....
(b) Let f 0, 1-R be a C2 function and let g, h: [0, 00)-R be C1. Consider the initial-boundary value problem kwr w(r, 0) f(a) w(0, t) g(t) w(1, t) h(t) for a function w: [0,1 x [0, 0)- R such that w, wn, and wa exist and are continuous. Show that the solution to this problem is unique, that is, if w1 and w2 [0, 1] x [0, 00)- R both satisfy these conditions, then w1 = w2....
 Exercise 3.1.12: Prove Proposition 3.1.17. Exercise 3.1.13: Suppose SCR and c is a cluster point of S. Suppose : S R is bounded. Show that there exists a sequence {x} with X, ES\{c} and lim X e such thar S(x)} converges. and g such thal 2 2 asli and 8 ) Las y C2, bulg 1)) does not go lo L as is, find x → Exercise 3.1.15: Show that the condition of being a cluster point is necessary to...
Exercise 3.1.12: Prove Proposition 3.1.17. Exercise 3.1.13: Suppose SCR and c is a cluster point of S. Suppose : S R is bounded. Show that there exists a sequence {x} with X, ES\{c} and lim X e such thar S(x)} converges. and g such thal 2 2 asli and 8 ) Las y C2, bulg 1)) does not go lo L as is, find x → Exercise 3.1.15: Show that the condition of being a cluster point is necessary to...
 Both part of the question is True or False. Thank you
Problem 1. (ref. Example 3 in the slide) Let X = Y = C[0, 1] (with the norm || ||C[0,1] = sup |u(x)]). For any u € C[0, 1], define T€[0,1] v(t) = u(s)ds. We denote by T the mapping from u to v with D(T) = C[0, 1], i.e., v(t) = Tu(t). Then, the following conditions are true or not? Example 3. We denote by the set of...
Both part of the question is True or False. Thank you
Problem 1. (ref. Example 3 in the slide) Let X = Y = C[0, 1] (with the norm || ||C[0,1] = sup |u(x)]). For any u € C[0, 1], define T€[0,1] v(t) = u(s)ds. We denote by T the mapping from u to v with D(T) = C[0, 1], i.e., v(t) = Tu(t). Then, the following conditions are true or not? Example 3. We denote by the set of...
 Problem 3. (1) Let H be a Hilbert space and S, TE B(HH). Then, prove that ||ST|| ||||||||| (2) Let X, Y be Hilbert spaces and Te B(X,Y). Then, prove that ||1||| sup ||T3|1 TEX=1 Let X, Y be Banach spaces. Definition (review) We denote by B(X, Y) a set of all bounded linear operators T:X + Y with D(T) = X. B(X, Y) is a vector space. Definition (review) A linear operator T:X + Y is said to be...
Problem 3. (1) Let H be a Hilbert space and S, TE B(HH). Then, prove that ||ST|| ||||||||| (2) Let X, Y be Hilbert spaces and Te B(X,Y). Then, prove that ||1||| sup ||T3|1 TEX=1 Let X, Y be Banach spaces. Definition (review) We denote by B(X, Y) a set of all bounded linear operators T:X + Y with D(T) = X. B(X, Y) is a vector space. Definition (review) A linear operator T:X + Y is said to be...
Most questions answered within 3 hours.
-
Under all the various types of market structures, firms
must eventually earn some economic profits for...
asked 59 seconds from now -
Consider the following fitness regime for a single locus trait
with two co-dominant alleles: w11 =...
asked 3 minutes ago -
A large cable company reports the following.
80% of its customers subscribe to its cable TV...
asked 19 minutes ago -
Please answer the question in brief.
Discuss the role of ERP in organizations. Are ERP tools...
asked 4 minutes ago -
Discuss the pros and cons of collaborative software such
as SameTime. Does it increase productivity? What...
asked 17 minutes ago -
1. Are all good samples random?
2. Magazines often report surveys giving statistics such as “63%...
asked 12 minutes ago -
Buying your in-laws a gift because it’s expected is
due to the ____________ motive of gift-giving....
asked 20 minutes ago -
Calculate the expected value, the variance, and the standard
deviation of the given random variable X....
asked 1 hour ago -
A hospital performs 100 surgeries per week. The probability that
complications after surgery occur is 10%....
asked 1 hour ago -
1 point) Given the significance level α=0.01 find the following:
(a) left-tailed z value z= (b)...
asked 1 hour ago -
Assuming you are the head of the software development unit at
Cyber.Soft, explain and justify why...
asked 27 minutes ago -
Magnesium and nitrogen react in a combination reaction to
produce magnesium nitride. 3 Mg + N2...
asked 35 minutes ago