
Homework Answers
Add Answer to:
3. This problem is to prove the foll owing in the precise fashion described in class: Let O R2 eo...
3. This problem is to prove the following in the precise fashion described in class: Let o sR be ...
 3. This problem is to prove the following in the precise fashion described in class: Let o sR be open and let f :o, R have continuous partial derivatives of order three. If (o, 3o) ▽f(zo. ) = (0,0),Jar( , ) < 0, and fzz(z ,m)f (zo,yo) -(fe (a ,yo)) a local maximum value at (zo, yo) (that is, there exists r 0 such that B,(zo, yo) S O and f(a, y) 3 f(zo, yo) for all (x, y) e...
3. This problem is to prove the following in the precise fashion described in class: Let o sR be open and let f :o, R have continuous partial derivatives of order three. If (o, 3o) ▽f(zo. ) = (0,0),Jar( , ) < 0, and fzz(z ,m)f (zo,yo) -(fe (a ,yo)) a local maximum value at (zo, yo) (that is, there exists r 0 such that B,(zo, yo) S O and f(a, y) 3 f(zo, yo) for all (x, y) e...
3 This problem is to prove the following in the precise fashion described in class: Let O C R2 be...
 Please write carefully! I just need part a and c done.
Thank you. Will rate.
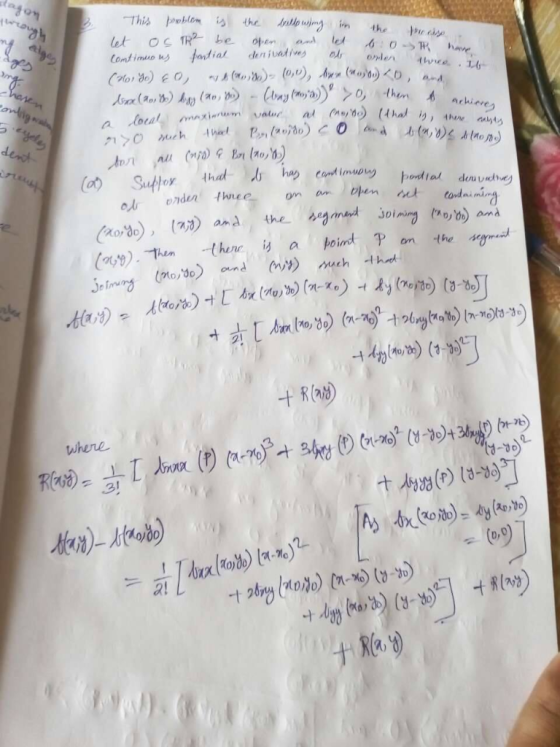
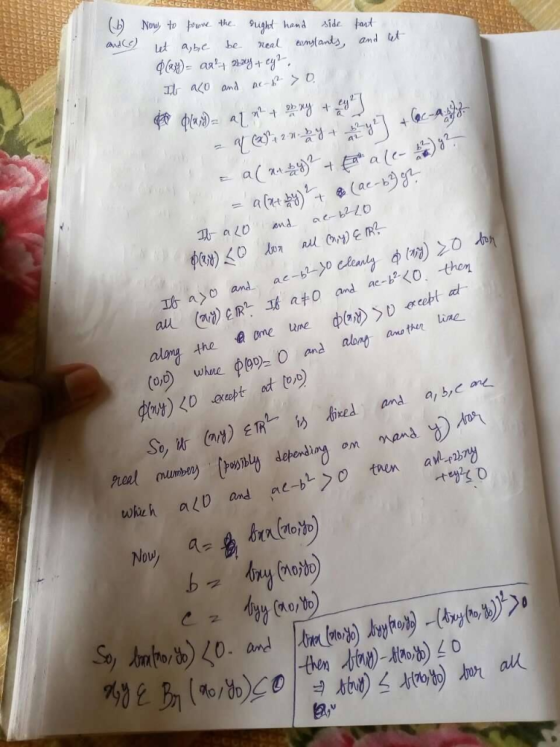
3 This problem is to prove the following in the precise fashion described in class: Let O C R2 be open and let f: 0+ R have continuous partial derivatives of order three. If (ro, o) O a local maximum value at (To, Va) (that is, there exist r > 0 such that B. (reo) O and (a) Multivariable Taylor Polynomial: Suppose that f has...
Please write carefully! I just need part a and c done.
Thank you. Will rate.
3 This problem is to prove the following in the precise fashion described in class: Let O C R2 be open and let f: 0+ R have continuous partial derivatives of order three. If (ro, o) O a local maximum value at (To, Va) (that is, there exist r > 0 such that B. (reo) O and (a) Multivariable Taylor Polynomial: Suppose that f has...
2. Let U C R2 be simply connected and let to E U. Let g: U(oR2 be irrotational and of class C1. A...
 2. Let U C R2 be simply connected and let to E U. Let g: U(oR2 be irrotational and of class C1. Assume that there exists r >0 such that B(zo, r) C U and g=0. Let γ be a closed sinile polygonal arc with range in U \ {zo), let「be its range, and let V be the bounded connected component of R2 \ Г. (a) Assume that V C U \ [xo) and prove that g=0. (b) Assume that...
2. Let U C R2 be simply connected and let to E U. Let g: U(oR2 be irrotational and of class C1. Assume that there exists r >0 such that B(zo, r) C U and g=0. Let γ be a closed sinile polygonal arc with range in U \ {zo), let「be its range, and let V be the bounded connected component of R2 \ Г. (a) Assume that V C U \ [xo) and prove that g=0. (b) Assume that...
How to prove these two questions? 3. Let f : 10, 11 → [O, 1] be...
 How to prove these two questions?
3. Let f : 10, 11 → [O, 1] be continuous. Then there exists x [0,1] such that f(x)-x. 4. A function f : R → R is continuous if and only if the pre-image of all open sets are open. Note: The pre-image of a set s is defined as f-1 (S)-{re R : f(x) є S). For example if f(x), then f ((0,1) (1,0)U (0, 1). =x- 1,0) U (0, 1
How to prove these two questions?
3. Let f : 10, 11 → [O, 1] be continuous. Then there exists x [0,1] such that f(x)-x. 4. A function f : R → R is continuous if and only if the pre-image of all open sets are open. Note: The pre-image of a set s is defined as f-1 (S)-{re R : f(x) є S). For example if f(x), then f ((0,1) (1,0)U (0, 1). =x- 1,0) U (0, 1
Implicit Function Theorem in Two Variables: Let g: R2 → R be a smooth function. Set {(z, y) E R2 ...
 Implicit Function Theorem in Two Variables: Let g: R2 → R be a smooth function. Set {(z, y) E R2 | g(z, y) = 0} S Suppose g(a, b)-0 so that (a, b) E S and dg(a, b)メO. Then there exists an open neighborhood of (a, b) say V such that SnV is the image of a smooth parameterized curve. (1) Verify the implicit function theorem using the two examples above. 2) Since dg(a,b) 0, argue that it suffices to...
Implicit Function Theorem in Two Variables: Let g: R2 → R be a smooth function. Set {(z, y) E R2 | g(z, y) = 0} S Suppose g(a, b)-0 so that (a, b) E S and dg(a, b)メO. Then there exists an open neighborhood of (a, b) say V such that SnV is the image of a smooth parameterized curve. (1) Verify the implicit function theorem using the two examples above. 2) Since dg(a,b) 0, argue that it suffices to...
Problem 3. (1) Let H be a Hilbert space and S, TE B(HH). Then, prove that...
 Problem 3. (1) Let H be a Hilbert space and S, TE B(HH). Then, prove that ||ST|| ||||||||| (2) Let X, Y be Hilbert spaces and Te B(X,Y). Then, prove that ||1||| sup ||T3|1 TEX=1 Let X, Y be Banach spaces. Definition (review) We denote by B(X, Y) a set of all bounded linear operators T:X + Y with D(T) = X. B(X, Y) is a vector space. Definition (review) A linear operator T:X + Y is said to be...
Problem 3. (1) Let H be a Hilbert space and S, TE B(HH). Then, prove that ||ST|| ||||||||| (2) Let X, Y be Hilbert spaces and Te B(X,Y). Then, prove that ||1||| sup ||T3|1 TEX=1 Let X, Y be Banach spaces. Definition (review) We denote by B(X, Y) a set of all bounded linear operators T:X + Y with D(T) = X. B(X, Y) is a vector space. Definition (review) A linear operator T:X + Y is said to be...
I need help trying to understand what (S1) and (S2) are saying. Maybe in other words or pictures because the book is more confusing 3.1.1. Let M CR" be a nonempty set and 1 s k n. Then k . Then...
 I need help trying to understand what (S1) and (S2) are saying.
Maybe in other words or pictures because the book is more
confusing
3.1.1. Let M CR" be a nonempty set and 1 s k n. Then k . Then M is a -dimensional regular surface (briefly, regul each point xo there ar kf class CP (p)i nd amapping of class C e M there exist an open set AC such that (SI) there exists an open set U...
I need help trying to understand what (S1) and (S2) are saying.
Maybe in other words or pictures because the book is more
confusing
3.1.1. Let M CR" be a nonempty set and 1 s k n. Then k . Then M is a -dimensional regular surface (briefly, regul each point xo there ar kf class CP (p)i nd amapping of class C e M there exist an open set AC such that (SI) there exists an open set U...
 3. This problem is to prove the following in the precise fashion described in class: Let o sR be open and let f :o, R have continuous partial derivatives of order three. If (o, 3o) ▽f(zo. ) = (0,0),Jar( , ) < 0, and fzz(z ,m)f (zo,yo) -(fe (a ,yo)) a local maximum value at (zo, yo) (that is, there exists r 0 such that B,(zo, yo) S O and f(a, y) 3 f(zo, yo) for all (x, y) e...
3. This problem is to prove the following in the precise fashion described in class: Let o sR be open and let f :o, R have continuous partial derivatives of order three. If (o, 3o) ▽f(zo. ) = (0,0),Jar( , ) < 0, and fzz(z ,m)f (zo,yo) -(fe (a ,yo)) a local maximum value at (zo, yo) (that is, there exists r 0 such that B,(zo, yo) S O and f(a, y) 3 f(zo, yo) for all (x, y) e...
 Please write carefully! I just need part a and c done.
Thank you. Will rate.
3 This problem is to prove the following in the precise fashion described in class: Let O C R2 be open and let f: 0+ R have continuous partial derivatives of order three. If (ro, o) O a local maximum value at (To, Va) (that is, there exist r > 0 such that B. (reo) O and (a) Multivariable Taylor Polynomial: Suppose that f has...
Please write carefully! I just need part a and c done.
Thank you. Will rate.
3 This problem is to prove the following in the precise fashion described in class: Let O C R2 be open and let f: 0+ R have continuous partial derivatives of order three. If (ro, o) O a local maximum value at (To, Va) (that is, there exist r > 0 such that B. (reo) O and (a) Multivariable Taylor Polynomial: Suppose that f has...
 2. Let U C R2 be simply connected and let to E U. Let g: U(oR2 be irrotational and of class C1. Assume that there exists r >0 such that B(zo, r) C U and g=0. Let γ be a closed sinile polygonal arc with range in U \ {zo), let「be its range, and let V be the bounded connected component of R2 \ Г. (a) Assume that V C U \ [xo) and prove that g=0. (b) Assume that...
2. Let U C R2 be simply connected and let to E U. Let g: U(oR2 be irrotational and of class C1. Assume that there exists r >0 such that B(zo, r) C U and g=0. Let γ be a closed sinile polygonal arc with range in U \ {zo), let「be its range, and let V be the bounded connected component of R2 \ Г. (a) Assume that V C U \ [xo) and prove that g=0. (b) Assume that...
 How to prove these two questions?
3. Let f : 10, 11 → [O, 1] be continuous. Then there exists x [0,1] such that f(x)-x. 4. A function f : R → R is continuous if and only if the pre-image of all open sets are open. Note: The pre-image of a set s is defined as f-1 (S)-{re R : f(x) є S). For example if f(x), then f ((0,1) (1,0)U (0, 1). =x- 1,0) U (0, 1
How to prove these two questions?
3. Let f : 10, 11 → [O, 1] be continuous. Then there exists x [0,1] such that f(x)-x. 4. A function f : R → R is continuous if and only if the pre-image of all open sets are open. Note: The pre-image of a set s is defined as f-1 (S)-{re R : f(x) є S). For example if f(x), then f ((0,1) (1,0)U (0, 1). =x- 1,0) U (0, 1
 Implicit Function Theorem in Two Variables: Let g: R2 → R be a smooth function. Set {(z, y) E R2 | g(z, y) = 0} S Suppose g(a, b)-0 so that (a, b) E S and dg(a, b)メO. Then there exists an open neighborhood of (a, b) say V such that SnV is the image of a smooth parameterized curve. (1) Verify the implicit function theorem using the two examples above. 2) Since dg(a,b) 0, argue that it suffices to...
Implicit Function Theorem in Two Variables: Let g: R2 → R be a smooth function. Set {(z, y) E R2 | g(z, y) = 0} S Suppose g(a, b)-0 so that (a, b) E S and dg(a, b)メO. Then there exists an open neighborhood of (a, b) say V such that SnV is the image of a smooth parameterized curve. (1) Verify the implicit function theorem using the two examples above. 2) Since dg(a,b) 0, argue that it suffices to...
 Problem 3. (1) Let H be a Hilbert space and S, TE B(HH). Then, prove that ||ST|| ||||||||| (2) Let X, Y be Hilbert spaces and Te B(X,Y). Then, prove that ||1||| sup ||T3|1 TEX=1 Let X, Y be Banach spaces. Definition (review) We denote by B(X, Y) a set of all bounded linear operators T:X + Y with D(T) = X. B(X, Y) is a vector space. Definition (review) A linear operator T:X + Y is said to be...
Problem 3. (1) Let H be a Hilbert space and S, TE B(HH). Then, prove that ||ST|| ||||||||| (2) Let X, Y be Hilbert spaces and Te B(X,Y). Then, prove that ||1||| sup ||T3|1 TEX=1 Let X, Y be Banach spaces. Definition (review) We denote by B(X, Y) a set of all bounded linear operators T:X + Y with D(T) = X. B(X, Y) is a vector space. Definition (review) A linear operator T:X + Y is said to be...
 I need help trying to understand what (S1) and (S2) are saying.
Maybe in other words or pictures because the book is more
confusing
3.1.1. Let M CR" be a nonempty set and 1 s k n. Then k . Then M is a -dimensional regular surface (briefly, regul each point xo there ar kf class CP (p)i nd amapping of class C e M there exist an open set AC such that (SI) there exists an open set U...
I need help trying to understand what (S1) and (S2) are saying.
Maybe in other words or pictures because the book is more
confusing
3.1.1. Let M CR" be a nonempty set and 1 s k n. Then k . Then M is a -dimensional regular surface (briefly, regul each point xo there ar kf class CP (p)i nd amapping of class C e M there exist an open set AC such that (SI) there exists an open set U...
Most questions answered within 3 hours.
-
A company just paid a dividend of $1.50 per share. The consensus
forecast of financial analysts...
asked 2 minutes ago -
What might be a negative mutation that would hinder the
bug population?
asked 6 minutes ago -
A mass of 0.50 g of an unknown acid HA required 20.0 mL of 0.25
M...
asked 12 minutes ago -
Mitch is a director and officer of Numero Uno, Inc. Mitch makes
a marketing decision that...
asked 13 minutes ago -
A pair of fair dice is tossed. Let X denote the larger of the
two numbers...
asked 21 minutes ago -
What are the variety of forms of products dispensed with aerosol
spray?
asked 25 minutes ago -
Which one of the following statements is true about C++
keywords?
a. A keyword can have...
asked 25 minutes ago -
Pyruvate Kinase, an allosteric enzyme, accelerates the
conversion of phosphoenolpyruvate to pyruvate.
1) Draw curves describing...
asked 27 minutes ago -
question 1
Which of the following is an example of a bottom-up technique
for developing promotional...
asked 45 minutes ago -
1)In FM modulation, what aspect of the carrier is being
modulated?
2)Explain in your own words,...
asked 41 minutes ago -
Andromeda Galaxy, M31, is considered a sister galaxy to Milky
Way galaxy. One similarirty is their...
asked 47 minutes ago -
How does temperature affect ADH during enzyme
kinetics?
asked 55 minutes ago