
Homework Answers
`Hey,
Note: Brother in case of any queries, just comment in box I would be very happy to assist all your queries
clc
clear all
x=linspace(-2,2,5);
y=[];
g=@(x) 5*x^5+6*x^4-2*x^3+8*x^2+3*x-15;
h=0.01;
for i=1:length(x)
y(i)=(g(x(i)+h)-g(x(i)-h))/(2*h);
end
C=polyfit(x,y,4);
gd=@(x) 25*x^4+24*x^3-6*x^2+16*x+3;
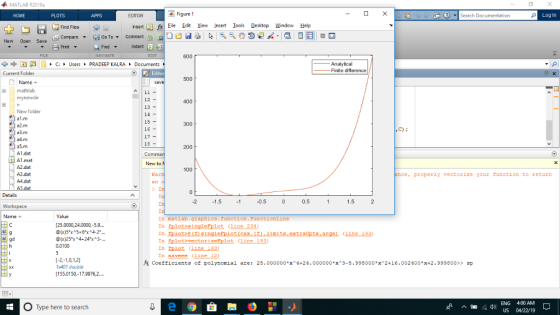
fplot(gd,[-2,2]);
xx=-2:0.01:2;
hold on;
plot(xx,polyval(C,xx));
fprintf('Coefficients of polynomial are:
%f*x^4+%f*x^3%f*x^2+%f*x+%f',C);
legend('Analytical','Finite difference');
disp('Both are approximately same since this is a polynomial fit
for centered difference with low h');
Kindly revert for any queries
Thanks.
Add Answer to:
Problem 4 : Finite difference formula and interpolation For this problem, you will approximate th...
Homework 5 (35 Points max) Please Submit all Matlab and Data files that you create for this homew...
 Homework 5 (35 Points max) Please Submit all Matlab and Data files that you create for this homework Problem 1 (max 20 Points): For the second-order drag model (see Eq.(1)), compute the velocity of a free-falling parachutist using Euler's method for the case where m80 kg and cd 0.25 kg/m. Perform the calculation from t 0 to 20 s with a step size of 1ms. Use an initial condition that the parachutist has an upward velocity of 20 m/s at...
Homework 5 (35 Points max) Please Submit all Matlab and Data files that you create for this homework Problem 1 (max 20 Points): For the second-order drag model (see Eq.(1)), compute the velocity of a free-falling parachutist using Euler's method for the case where m80 kg and cd 0.25 kg/m. Perform the calculation from t 0 to 20 s with a step size of 1ms. Use an initial condition that the parachutist has an upward velocity of 20 m/s at...
The first two parts should be solved by Matlab. This is from an intro to Numerical...
 The first two parts should be solved by Matlab. This is from an
intro to Numerical Analysis Class and I have provided the Alog 3.2
in below. Please write the whole codes for me.
Alog3.2
% NEWTONS INTERPOLATORY DIVIDED-DIFFERENCE FORMULA ALGORITHM
3.2
% To obtain the divided-difference coefficients of the
% interpolatory polynomial P on the (n+1) distinct numbers
x(0),
% x(1), ..., x(n) for the function f:
% INPUT: numbers x(0), x(1), ..., x(n); values f(x(0)),
f(x(1)),
% ...,...
The first two parts should be solved by Matlab. This is from an
intro to Numerical Analysis Class and I have provided the Alog 3.2
in below. Please write the whole codes for me.
Alog3.2
% NEWTONS INTERPOLATORY DIVIDED-DIFFERENCE FORMULA ALGORITHM
3.2
% To obtain the divided-difference coefficients of the
% interpolatory polynomial P on the (n+1) distinct numbers
x(0),
% x(1), ..., x(n) for the function f:
% INPUT: numbers x(0), x(1), ..., x(n); values f(x(0)),
f(x(1)),
% ...,...
(b) . Write the k-th step of the trapezoidal method as a root-finding problem Ğ = is Y+1 where the unknown (e)Find the Jacobian matrix of the vector function from the previous part. (dWrite a funct...
 (b) . Write the k-th step of the trapezoidal method as a root-finding problem Ğ = is Y+1 where the unknown (e)Find the Jacobian matrix of the vector function from the previous part. (dWrite a function in its own file with definition [Y] dampedPendulum(L, T) function alpha, beta, d, h, that approximates the solution to the equivalent system you derived in part (a) with L: the length of the pendulum string alpha: the initial displacement beta: the initial velocity d:...
(b) . Write the k-th step of the trapezoidal method as a root-finding problem Ğ = is Y+1 where the unknown (e)Find the Jacobian matrix of the vector function from the previous part. (dWrite a function in its own file with definition [Y] dampedPendulum(L, T) function alpha, beta, d, h, that approximates the solution to the equivalent system you derived in part (a) with L: the length of the pendulum string alpha: the initial displacement beta: the initial velocity d:...
2. Consider a mass m moving in R3 without friction. It is fasten tightly at one...
 2. Consider a mass m moving in R3 without friction. It is fasten tightly at one end of a string with length 1 and can swing in any direction. In fact, it moves on a sphere, a subspace of R3 1 0 φ g 2.1 Use the spherical coordinates (1,0,) to derive the Lagrangian L(0,0,0,0) = T-U, namely the difference of kinetic energy T and potential energy U. (Note r = 1 is fixed.) 2.2 Calculate the Euler-Lagrange equations, namely...
2. Consider a mass m moving in R3 without friction. It is fasten tightly at one end of a string with length 1 and can swing in any direction. In fact, it moves on a sphere, a subspace of R3 1 0 φ g 2.1 Use the spherical coordinates (1,0,) to derive the Lagrangian L(0,0,0,0) = T-U, namely the difference of kinetic energy T and potential energy U. (Note r = 1 is fixed.) 2.2 Calculate the Euler-Lagrange equations, namely...
 Homework 5 (35 Points max) Please Submit all Matlab and Data files that you create for this homework Problem 1 (max 20 Points): For the second-order drag model (see Eq.(1)), compute the velocity of a free-falling parachutist using Euler's method for the case where m80 kg and cd 0.25 kg/m. Perform the calculation from t 0 to 20 s with a step size of 1ms. Use an initial condition that the parachutist has an upward velocity of 20 m/s at...
Homework 5 (35 Points max) Please Submit all Matlab and Data files that you create for this homework Problem 1 (max 20 Points): For the second-order drag model (see Eq.(1)), compute the velocity of a free-falling parachutist using Euler's method for the case where m80 kg and cd 0.25 kg/m. Perform the calculation from t 0 to 20 s with a step size of 1ms. Use an initial condition that the parachutist has an upward velocity of 20 m/s at...
 The first two parts should be solved by Matlab. This is from an
intro to Numerical Analysis Class and I have provided the Alog 3.2
in below. Please write the whole codes for me.
Alog3.2
% NEWTONS INTERPOLATORY DIVIDED-DIFFERENCE FORMULA ALGORITHM
3.2
% To obtain the divided-difference coefficients of the
% interpolatory polynomial P on the (n+1) distinct numbers
x(0),
% x(1), ..., x(n) for the function f:
% INPUT: numbers x(0), x(1), ..., x(n); values f(x(0)),
f(x(1)),
% ...,...
The first two parts should be solved by Matlab. This is from an
intro to Numerical Analysis Class and I have provided the Alog 3.2
in below. Please write the whole codes for me.
Alog3.2
% NEWTONS INTERPOLATORY DIVIDED-DIFFERENCE FORMULA ALGORITHM
3.2
% To obtain the divided-difference coefficients of the
% interpolatory polynomial P on the (n+1) distinct numbers
x(0),
% x(1), ..., x(n) for the function f:
% INPUT: numbers x(0), x(1), ..., x(n); values f(x(0)),
f(x(1)),
% ...,...
 (b) . Write the k-th step of the trapezoidal method as a root-finding problem Ğ = is Y+1 where the unknown (e)Find the Jacobian matrix of the vector function from the previous part. (dWrite a function in its own file with definition [Y] dampedPendulum(L, T) function alpha, beta, d, h, that approximates the solution to the equivalent system you derived in part (a) with L: the length of the pendulum string alpha: the initial displacement beta: the initial velocity d:...
(b) . Write the k-th step of the trapezoidal method as a root-finding problem Ğ = is Y+1 where the unknown (e)Find the Jacobian matrix of the vector function from the previous part. (dWrite a function in its own file with definition [Y] dampedPendulum(L, T) function alpha, beta, d, h, that approximates the solution to the equivalent system you derived in part (a) with L: the length of the pendulum string alpha: the initial displacement beta: the initial velocity d:...
 2. Consider a mass m moving in R3 without friction. It is fasten tightly at one end of a string with length 1 and can swing in any direction. In fact, it moves on a sphere, a subspace of R3 1 0 φ g 2.1 Use the spherical coordinates (1,0,) to derive the Lagrangian L(0,0,0,0) = T-U, namely the difference of kinetic energy T and potential energy U. (Note r = 1 is fixed.) 2.2 Calculate the Euler-Lagrange equations, namely...
2. Consider a mass m moving in R3 without friction. It is fasten tightly at one end of a string with length 1 and can swing in any direction. In fact, it moves on a sphere, a subspace of R3 1 0 φ g 2.1 Use the spherical coordinates (1,0,) to derive the Lagrangian L(0,0,0,0) = T-U, namely the difference of kinetic energy T and potential energy U. (Note r = 1 is fixed.) 2.2 Calculate the Euler-Lagrange equations, namely...
Most questions answered within 3 hours.
-
Write a program to solve the Josephus problem, with the following
modification:
Sample Input:
./a.out n...
asked 1 hour ago -
At the start of a CD it is spinning at a rate of 525 rpm
(revolutions...
asked 1 hour ago -
4. Without doing any calculations, predict whether the observed
∆T would increase, decrease or remain the...
asked 3 hours ago -
Based on the range, which of the following sets of scores has
the greatest variability? 3,...
asked 4 hours ago -
Ripples in a pond travel at a velocity of 3 m/s with one peak
passing a...
asked 4 hours ago -
A man stands on the roof of a building of height 13.0 mm and
throws a...
asked 4 hours ago -
The extent to which assets are financed by borrowed funds and
other liabilities is indicated by:...
asked 5 hours ago -
Explain in detail
Germany is the fifth largest economy
explain what goods and services Germany specializes...
asked 5 hours ago -
The density of platinum is 21.45 g/mL. If a cube of platinum
with a mass of...
asked 5 hours ago -
Accounts Receivable
Sales
A/R Posting
Extended Sales Invoice
Packing Slip
Compare invoice to packing slip 2...
asked 5 hours ago -
Michaella, age 23, is a full-time law student and is claimed by
her parents as a...
asked 5 hours ago -
Why are polymers not typically casted into products?
asked 5 hours ago