
Homework Answers
matlab code:
for a=[1 0.5 2 5]
k=2;
z=[];
p=[a];
s1=zpk(z,p,k)
sys=feedback(s1,1)
figure
step(sys),grid;
stepinfo(sys)
end
output:
s1 =
2
-----
(s-1)
Continuous-time zero/pole/gain model.
sys =
2
-----
(s+1)
Continuous-time zero/pole/gain model.
ans =
struct with fields:
RiseTime: 2.1970
SettlingTime: 3.9121
SettlingMin: 1.8090
SettlingMax: 1.9999
Overshoot: 0
Undershoot: 0
Peak: 1.9999
PeakTime: 10.5458
s1 =
2
-------
(s-0.5)
Continuous-time zero/pole/gain model.
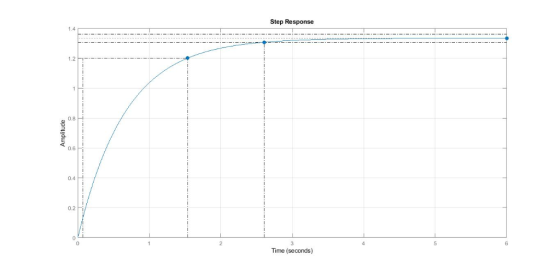
sys =
2
-------
(s+1.5)
Continuous-time zero/pole/gain model.
ans =
struct with fields:
RiseTime: 1.4647
SettlingTime: 2.6080
SettlingMin: 1.2060
SettlingMax: 1.3333
Overshoot: 0
Undershoot: 0
Peak: 1.3333
PeakTime: 7.0306
s1 =
2
-----
(s-2)
Continuous-time zero/pole/gain model.
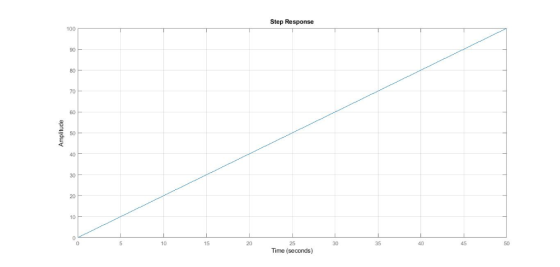
sys =
2
-
s
Continuous-time zero/pole/gain model.
ans =
struct with fields:
RiseTime: NaN
SettlingTime: NaN
SettlingMin: NaN
SettlingMax: NaN
Overshoot: NaN
Undershoot: NaN
Peak: Inf
PeakTime: Inf
s1 =
2
-----
(s-5)
Continuous-time zero/pole/gain model.
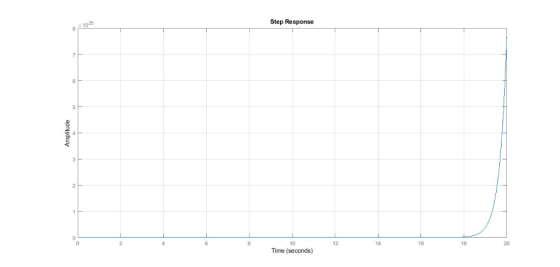
sys =
2
-----
(s-3)
Continuous-time zero/pole/gain model.
ans =
struct with fields:
RiseTime: NaN
SettlingTime: NaN
SettlingMin: NaN
SettlingMax: NaN
Overshoot: NaN
Undershoot: NaN
Peak: Inf
PeakTime: Inf

Add Answer to:
Please solve them on MATLAB PROBLEM 1 A closed loop control system is depicted in Figure 1 where K 2 and the nominal value of a is 1. The goal in this problem is to examine the sensitivity of the who...
Please solve with MATLAB, please solve with MATLAB PROBLEM 1 A closed loop control system is depicted in Figure 1 where K 2 and the nominal value of a is 1. The goal in this problem is to examine the...
 Please solve with MATLAB, please solve with MATLAB
PROBLEM 1 A closed loop control system is depicted in Figure 1 where K 2 and the nominal value of a is 1. The goal in this problem is to examine the sensitivity of the whole system in Figure 1 to the parameter a. (a) If a 1, demonstrate explicitly that the steady state value of output is equal to 2 when input is unit step function. Confirm that, after 4 seconds,...
Please solve with MATLAB, please solve with MATLAB
PROBLEM 1 A closed loop control system is depicted in Figure 1 where K 2 and the nominal value of a is 1. The goal in this problem is to examine the sensitivity of the whole system in Figure 1 to the parameter a. (a) If a 1, demonstrate explicitly that the steady state value of output is equal to 2 when input is unit step function. Confirm that, after 4 seconds,...
help Consider the closed-loop system in Figure E5.19. where Gs)G 3s and H(s) -K (a) Determine...
 help
Consider the closed-loop system in Figure E5.19. where Gs)G 3s and H(s) -K (a) Determine the closed-loop transfer function T(s) Y(s)/R(s). (b) Determine the steady-state error of the closed-loop system response to a unit ramp input, R(s) 1/s (c) Select a value for Ka so that the steady-state error of the system response to a unit step input, R(s)1/s, is zero.
help
Consider the closed-loop system in Figure E5.19. where Gs)G 3s and H(s) -K (a) Determine the closed-loop transfer function T(s) Y(s)/R(s). (b) Determine the steady-state error of the closed-loop system response to a unit ramp input, R(s) 1/s (c) Select a value for Ka so that the steady-state error of the system response to a unit step input, R(s)1/s, is zero.
Problem 3 (25%): The closed-loop system has the block diagram shown below. Controlle Process Sensor s + l (a) (5%) Sketch the root locus of the closed-loop system. (b) (5%) Determine the range of...
 Problem 3 (25%): The closed-loop system has the block diagram shown below. Controlle Process Sensor s + l (a) (5%) Sketch the root locus of the closed-loop system. (b) (5%) Determine the range of K that the closed-loop system is stable. (c) (5%) Find the percentage of overshoot and the steady state error due to a unit step input of the open loop system process. (d) (5%) Find the steady-state error due to a unit step input of the closed-loop...
Problem 3 (25%): The closed-loop system has the block diagram shown below. Controlle Process Sensor s + l (a) (5%) Sketch the root locus of the closed-loop system. (b) (5%) Determine the range of K that the closed-loop system is stable. (c) (5%) Find the percentage of overshoot and the steady state error due to a unit step input of the open loop system process. (d) (5%) Find the steady-state error due to a unit step input of the closed-loop...
Problem #9 Determine the values of K and k of the closed-loop system shown in Figure...
 Problem #9 Determine the values of K and k of the closed-loop system shown in Figure 9 so that the maximum overshot in unit step response is 25 % and the peak time is 2 sec. Assume that J= 1 Kg.m? R(3) - HQ C(s) Figure 9 Problem #10 The open-loop transfer function of a unity feedback system is sis +23 It is specified that the response of the system to step inpur should have a maximum overshoot of 10...
Problem #9 Determine the values of K and k of the closed-loop system shown in Figure 9 so that the maximum overshot in unit step response is 25 % and the peak time is 2 sec. Assume that J= 1 Kg.m? R(3) - HQ C(s) Figure 9 Problem #10 The open-loop transfer function of a unity feedback system is sis +23 It is specified that the response of the system to step inpur should have a maximum overshoot of 10...
PROBLEM 4 A unity feedback closed loop control system is displayed in Figure 4 (a) Assume that the controller is given by G (s)-2. Based on the lsim function of MATLAB, calculate and obtain the g...
 PROBLEM 4 A unity feedback closed loop control system is displayed in Figure 4 (a) Assume that the controller is given by G (s)-2. Based on the lsim function of MATLAB, calculate and obtain the graph of the response for 0,(1)-a. Here a ; 0.5%, Find the height error after 10 seconds, (b) In order to reduce the steady-state error, substitute G. (s) with the following controller: K2 This is a Proportional-Integral (PI) controller. Repeat part (a) in the presence...
PROBLEM 4 A unity feedback closed loop control system is displayed in Figure 4 (a) Assume that the controller is given by G (s)-2. Based on the lsim function of MATLAB, calculate and obtain the graph of the response for 0,(1)-a. Here a ; 0.5%, Find the height error after 10 seconds, (b) In order to reduce the steady-state error, substitute G. (s) with the following controller: K2 This is a Proportional-Integral (PI) controller. Repeat part (a) in the presence...
Please solve it with step by step MATLAB code, thank you! Suppose that a system is shown in Figure 2. Based on for loop, write a piece of MATLAB code to calculate the closed loop poles for 03K35 and...
 Please solve it with step by step MATLAB code, thank you!
Suppose that a system is shown in Figure 2. Based on for loop, write a piece of MATLAB code to calculate the closed loop poles for 03K35 and plot the outputs where the poles are represented by "W" letter. Find the interval of K parameter for stability using Routh-Hurwitz method. Calculate the poles of the closed loop transfer function where K attains the minimum value such that the system...
Please solve it with step by step MATLAB code, thank you!
Suppose that a system is shown in Figure 2. Based on for loop, write a piece of MATLAB code to calculate the closed loop poles for 03K35 and plot the outputs where the poles are represented by "W" letter. Find the interval of K parameter for stability using Routh-Hurwitz method. Calculate the poles of the closed loop transfer function where K attains the minimum value such that the system...
Consider the following closed-loop system, where Y(s) R(s)+ KcP Ks Assume the following nominal values: Ko-2....
 Consider the following closed-loop system, where Y(s) R(s)+ KcP Ks Assume the following nominal values: Ko-2. 〈 = 0.8; ω,-4; Ks-2. Use transfer function sensitivity calculations in answering the questions below. a) With proportional controller gain K 10 and r(t) a step input, determine the percentage change in steady-state output y(t) if Ko increases 5% from its nominal value. (12 pts.) b) Repeat part (a) with Kc - 50. (6 pts.) c) With proportional controller gain Kc 10 and r(t)...
Consider the following closed-loop system, where Y(s) R(s)+ KcP Ks Assume the following nominal values: Ko-2. 〈 = 0.8; ω,-4; Ks-2. Use transfer function sensitivity calculations in answering the questions below. a) With proportional controller gain K 10 and r(t) a step input, determine the percentage change in steady-state output y(t) if Ko increases 5% from its nominal value. (12 pts.) b) Repeat part (a) with Kc - 50. (6 pts.) c) With proportional controller gain Kc 10 and r(t)...
Please solve part b and c and d !! Consider the closed loop system shown in...
 Please solve part b and c and d !!
Consider the closed loop system shown in Figure 4. The root locus of that system is shown in Figure 5 (s+40s+8) R(s) Y(s) Figure 4 System block diagram of Problem 4 a) On the root locus plot, sketch the region of possible roots of the dominant closed-loop poles such that the system response to a unit step has the following time domain specifications. [5] i. Damping ratio, 20.76 ii. Natural frequency,....
Please solve part b and c and d !!
Consider the closed loop system shown in Figure 4. The root locus of that system is shown in Figure 5 (s+40s+8) R(s) Y(s) Figure 4 System block diagram of Problem 4 a) On the root locus plot, sketch the region of possible roots of the dominant closed-loop poles such that the system response to a unit step has the following time domain specifications. [5] i. Damping ratio, 20.76 ii. Natural frequency,....
A unity feedback closed loop control system is displayed in Figure 4. (a) Assume that the control...
 Please solve as a MATLAB code.
A unity feedback closed loop control system is displayed in Figure 4. (a) Assume that the controller is given by G (s) 2. Based on the lsim function of MATLAB, calculate and obtain the graph of the response for (t) at. Here a 0.5°/s. Find the height error after 10 seconds, (b) In order to reduce the steady-state error, substitute G (s) with the following controller This is a Proportional-Integral (PI) controller. Repeat part...
Please solve as a MATLAB code.
A unity feedback closed loop control system is displayed in Figure 4. (a) Assume that the controller is given by G (s) 2. Based on the lsim function of MATLAB, calculate and obtain the graph of the response for (t) at. Here a 0.5°/s. Find the height error after 10 seconds, (b) In order to reduce the steady-state error, substitute G (s) with the following controller This is a Proportional-Integral (PI) controller. Repeat part...
Q2 (a) Consider the control system shown in Figure Q1 (a). Obtain the closed-loop transfer function...
 Q2 (a) Consider the control system shown in Figure Q1 (a). Obtain the closed-loop transfer function of this system and by using MATLAB obtain the unit step response of this closed loop system - R(S) c(s) 36+1) (s + 1) Figure Q2 (a) (b) A sampler and a zero-order hold element were inserted into the system in Figure Q1(a) as shown in Figure Q1(b). Obtain the closed-loop pulse transfer function of this system and by using MATLAB or otherwise, obtain...
Q2 (a) Consider the control system shown in Figure Q1 (a). Obtain the closed-loop transfer function of this system and by using MATLAB obtain the unit step response of this closed loop system - R(S) c(s) 36+1) (s + 1) Figure Q2 (a) (b) A sampler and a zero-order hold element were inserted into the system in Figure Q1(a) as shown in Figure Q1(b). Obtain the closed-loop pulse transfer function of this system and by using MATLAB or otherwise, obtain...
 Please solve with MATLAB, please solve with MATLAB
PROBLEM 1 A closed loop control system is depicted in Figure 1 where K 2 and the nominal value of a is 1. The goal in this problem is to examine the sensitivity of the whole system in Figure 1 to the parameter a. (a) If a 1, demonstrate explicitly that the steady state value of output is equal to 2 when input is unit step function. Confirm that, after 4 seconds,...
Please solve with MATLAB, please solve with MATLAB
PROBLEM 1 A closed loop control system is depicted in Figure 1 where K 2 and the nominal value of a is 1. The goal in this problem is to examine the sensitivity of the whole system in Figure 1 to the parameter a. (a) If a 1, demonstrate explicitly that the steady state value of output is equal to 2 when input is unit step function. Confirm that, after 4 seconds,...
 help
Consider the closed-loop system in Figure E5.19. where Gs)G 3s and H(s) -K (a) Determine the closed-loop transfer function T(s) Y(s)/R(s). (b) Determine the steady-state error of the closed-loop system response to a unit ramp input, R(s) 1/s (c) Select a value for Ka so that the steady-state error of the system response to a unit step input, R(s)1/s, is zero.
help
Consider the closed-loop system in Figure E5.19. where Gs)G 3s and H(s) -K (a) Determine the closed-loop transfer function T(s) Y(s)/R(s). (b) Determine the steady-state error of the closed-loop system response to a unit ramp input, R(s) 1/s (c) Select a value for Ka so that the steady-state error of the system response to a unit step input, R(s)1/s, is zero.
 Problem 3 (25%): The closed-loop system has the block diagram shown below. Controlle Process Sensor s + l (a) (5%) Sketch the root locus of the closed-loop system. (b) (5%) Determine the range of K that the closed-loop system is stable. (c) (5%) Find the percentage of overshoot and the steady state error due to a unit step input of the open loop system process. (d) (5%) Find the steady-state error due to a unit step input of the closed-loop...
Problem 3 (25%): The closed-loop system has the block diagram shown below. Controlle Process Sensor s + l (a) (5%) Sketch the root locus of the closed-loop system. (b) (5%) Determine the range of K that the closed-loop system is stable. (c) (5%) Find the percentage of overshoot and the steady state error due to a unit step input of the open loop system process. (d) (5%) Find the steady-state error due to a unit step input of the closed-loop...
 Problem #9 Determine the values of K and k of the closed-loop system shown in Figure 9 so that the maximum overshot in unit step response is 25 % and the peak time is 2 sec. Assume that J= 1 Kg.m? R(3) - HQ C(s) Figure 9 Problem #10 The open-loop transfer function of a unity feedback system is sis +23 It is specified that the response of the system to step inpur should have a maximum overshoot of 10...
Problem #9 Determine the values of K and k of the closed-loop system shown in Figure 9 so that the maximum overshot in unit step response is 25 % and the peak time is 2 sec. Assume that J= 1 Kg.m? R(3) - HQ C(s) Figure 9 Problem #10 The open-loop transfer function of a unity feedback system is sis +23 It is specified that the response of the system to step inpur should have a maximum overshoot of 10...
 PROBLEM 4 A unity feedback closed loop control system is displayed in Figure 4 (a) Assume that the controller is given by G (s)-2. Based on the lsim function of MATLAB, calculate and obtain the graph of the response for 0,(1)-a. Here a ; 0.5%, Find the height error after 10 seconds, (b) In order to reduce the steady-state error, substitute G. (s) with the following controller: K2 This is a Proportional-Integral (PI) controller. Repeat part (a) in the presence...
PROBLEM 4 A unity feedback closed loop control system is displayed in Figure 4 (a) Assume that the controller is given by G (s)-2. Based on the lsim function of MATLAB, calculate and obtain the graph of the response for 0,(1)-a. Here a ; 0.5%, Find the height error after 10 seconds, (b) In order to reduce the steady-state error, substitute G. (s) with the following controller: K2 This is a Proportional-Integral (PI) controller. Repeat part (a) in the presence...
 Please solve it with step by step MATLAB code, thank you!
Suppose that a system is shown in Figure 2. Based on for loop, write a piece of MATLAB code to calculate the closed loop poles for 03K35 and plot the outputs where the poles are represented by "W" letter. Find the interval of K parameter for stability using Routh-Hurwitz method. Calculate the poles of the closed loop transfer function where K attains the minimum value such that the system...
Please solve it with step by step MATLAB code, thank you!
Suppose that a system is shown in Figure 2. Based on for loop, write a piece of MATLAB code to calculate the closed loop poles for 03K35 and plot the outputs where the poles are represented by "W" letter. Find the interval of K parameter for stability using Routh-Hurwitz method. Calculate the poles of the closed loop transfer function where K attains the minimum value such that the system...
 Consider the following closed-loop system, where Y(s) R(s)+ KcP Ks Assume the following nominal values: Ko-2. 〈 = 0.8; ω,-4; Ks-2. Use transfer function sensitivity calculations in answering the questions below. a) With proportional controller gain K 10 and r(t) a step input, determine the percentage change in steady-state output y(t) if Ko increases 5% from its nominal value. (12 pts.) b) Repeat part (a) with Kc - 50. (6 pts.) c) With proportional controller gain Kc 10 and r(t)...
Consider the following closed-loop system, where Y(s) R(s)+ KcP Ks Assume the following nominal values: Ko-2. 〈 = 0.8; ω,-4; Ks-2. Use transfer function sensitivity calculations in answering the questions below. a) With proportional controller gain K 10 and r(t) a step input, determine the percentage change in steady-state output y(t) if Ko increases 5% from its nominal value. (12 pts.) b) Repeat part (a) with Kc - 50. (6 pts.) c) With proportional controller gain Kc 10 and r(t)...
 Please solve part b and c and d !!
Consider the closed loop system shown in Figure 4. The root locus of that system is shown in Figure 5 (s+40s+8) R(s) Y(s) Figure 4 System block diagram of Problem 4 a) On the root locus plot, sketch the region of possible roots of the dominant closed-loop poles such that the system response to a unit step has the following time domain specifications. [5] i. Damping ratio, 20.76 ii. Natural frequency,....
Please solve part b and c and d !!
Consider the closed loop system shown in Figure 4. The root locus of that system is shown in Figure 5 (s+40s+8) R(s) Y(s) Figure 4 System block diagram of Problem 4 a) On the root locus plot, sketch the region of possible roots of the dominant closed-loop poles such that the system response to a unit step has the following time domain specifications. [5] i. Damping ratio, 20.76 ii. Natural frequency,....
 Please solve as a MATLAB code.
A unity feedback closed loop control system is displayed in Figure 4. (a) Assume that the controller is given by G (s) 2. Based on the lsim function of MATLAB, calculate and obtain the graph of the response for (t) at. Here a 0.5°/s. Find the height error after 10 seconds, (b) In order to reduce the steady-state error, substitute G (s) with the following controller This is a Proportional-Integral (PI) controller. Repeat part...
Please solve as a MATLAB code.
A unity feedback closed loop control system is displayed in Figure 4. (a) Assume that the controller is given by G (s) 2. Based on the lsim function of MATLAB, calculate and obtain the graph of the response for (t) at. Here a 0.5°/s. Find the height error after 10 seconds, (b) In order to reduce the steady-state error, substitute G (s) with the following controller This is a Proportional-Integral (PI) controller. Repeat part...
 Q2 (a) Consider the control system shown in Figure Q1 (a). Obtain the closed-loop transfer function of this system and by using MATLAB obtain the unit step response of this closed loop system - R(S) c(s) 36+1) (s + 1) Figure Q2 (a) (b) A sampler and a zero-order hold element were inserted into the system in Figure Q1(a) as shown in Figure Q1(b). Obtain the closed-loop pulse transfer function of this system and by using MATLAB or otherwise, obtain...
Q2 (a) Consider the control system shown in Figure Q1 (a). Obtain the closed-loop transfer function of this system and by using MATLAB obtain the unit step response of this closed loop system - R(S) c(s) 36+1) (s + 1) Figure Q2 (a) (b) A sampler and a zero-order hold element were inserted into the system in Figure Q1(a) as shown in Figure Q1(b). Obtain the closed-loop pulse transfer function of this system and by using MATLAB or otherwise, obtain...
Most questions answered within 3 hours.
-
What does a 2-sided p value of 0.04 mean? (I am not asking if it
is...
asked 9 minutes ago -
A parallel-plate capacitor is made from two aluminum-foil
sheets, each 7.8 cmcm wide and 5.1 mmlong....
asked 11 minutes ago -
1. why is toluene a stronger nucleophile than benzene?
2.why is phenol a stronger nucleophile than...
asked 28 minutes ago -
4. How can you solve for the density of the liquid from the
slope? Please show...
asked 28 minutes ago -
when 2053 j of heat is added to 46.3 g of hexane C6H14 the
temperature increases...
asked 51 minutes ago -
I need new and unique answers, please. (Use your own words,
don't copy and paste), Please...
asked 54 minutes ago -
MCL 445.111 et seq. deals with Home Solicitation Sales.
MCL stands for Michigan Compiled Laws which...
asked 45 minutes ago -
Which of the following items may not create an NOL?
a.
sole proprietorship loss
b.
personal...
asked 50 minutes ago -
A hypothetical solution forms between a solid and a liquid. The
values of the thermodynamic quantities...
asked 48 minutes ago -
a)An ideal heat pump is being considered for use in heating an
environment with a temperature...
asked 51 minutes ago -
.
Convert the following pairs of voltage and current waveforms to
phasor form. Each pair of...
asked 53 minutes ago -
A 6.5 cm diameter ball has a terminal speed of 22 m/s. What is
the ball's...
asked 1 hour ago