Question

Problem 2 is made that the gains determined in Problem I are linear-quadratic optimal for the weighting Verify or refute this claim
Homework Answers
Answer #1


We were unable to transcribe this image
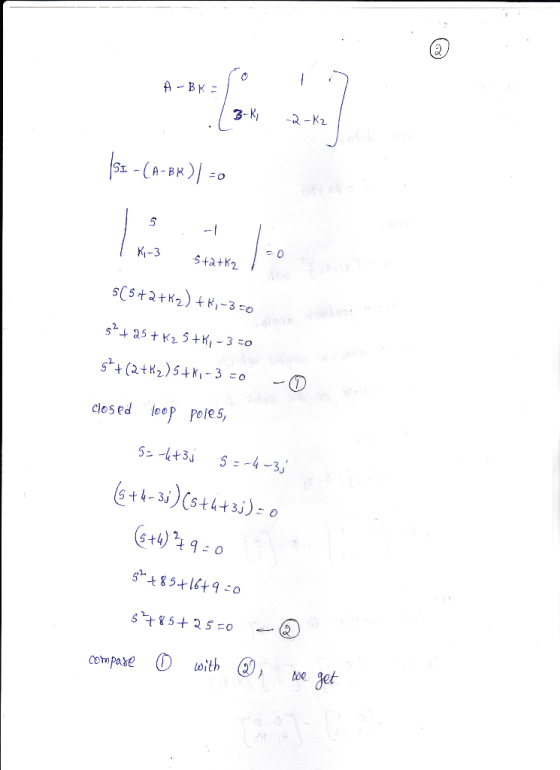
51 clesed eep Poles, 585+16+9 he get
X-3-25 K1 28 hesefese, 2 G 28
Know the answer?
Add Answer to:
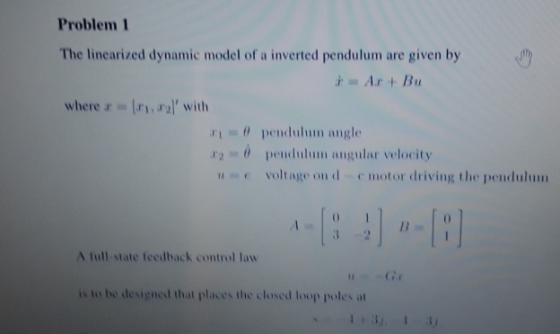
Problem 1 The linearized dynamic model of a inverted pendulum are given by where a i,l' with ri=() pendulum angle r pendulum angular velocity ue voltage on d e motor driving the pendulum 3...
Not the answer you're looking for?
Ask your own homework help question.
Our experts will answer your question WITHIN MINUTES for Free.
Similar Homework Help Questions
Problem 1 An inverted pendulum driven by a d-c motor is governed by the following differential...
 Problem 1 An inverted pendulum driven by a d-c motor is governed by the following differential and algcbraic equa tions: (a) Determine the transfer function of the process. (b) It is proposed to control the process using "proportional control": where yr is a constant reference value. Determine the value Kmir for which the gain K must exceed in order that the closed-loop system be stable. (c) Determine the value of K for which the magnitude of the error is less...
Problem 1 An inverted pendulum driven by a d-c motor is governed by the following differential and algcbraic equa tions: (a) Determine the transfer function of the process. (b) It is proposed to control the process using "proportional control": where yr is a constant reference value. Determine the value Kmir for which the gain K must exceed in order that the closed-loop system be stable. (c) Determine the value of K for which the magnitude of the error is less...
 Problem 1 An inverted pendulum driven by a d-c motor is governed by the following differential and algcbraic equa tions: (a) Determine the transfer function of the process. (b) It is proposed to control the process using "proportional control": where yr is a constant reference value. Determine the value Kmir for which the gain K must exceed in order that the closed-loop system be stable. (c) Determine the value of K for which the magnitude of the error is less...
Problem 1 An inverted pendulum driven by a d-c motor is governed by the following differential and algcbraic equa tions: (a) Determine the transfer function of the process. (b) It is proposed to control the process using "proportional control": where yr is a constant reference value. Determine the value Kmir for which the gain K must exceed in order that the closed-loop system be stable. (c) Determine the value of K for which the magnitude of the error is less...
ADVERTISEMENT
Need Online Homework Help?
Ask
a QuestionGet Answers For Free
Most questions answered within 3 hours.
Most questions answered within 3 hours.
ADVERTISEMENT
ADVERTISEMENT
Active Questions
-
Explain some different types of fungi. State the different
divisions undergo by fungi.
asked 10 minutes ago -
The shortest time that 120 C can flow through a 20 A circuit
breaker without tripping...
asked 11 minutes ago -
A software design pattern is a general, reusable solution to a
commonly occurring problem, acting as...
asked 14 minutes ago -
The mean waiting time at the drive-through of a fast-food
restaurant from the time an order...
asked 30 minutes ago -
The pitch (p) of a helix is defined as p = dn, in which n is...
asked 32 minutes ago -
Do you agree that the declining stock of social capital is the
blame for the failure...
asked 36 minutes ago -
A researcher is interested in whether coffee consumption helps
with performance on reading comprehension tasks. The...
asked 46 minutes ago -
it has been estimated since the beginning of the human race that
about 133 metric ton...
asked 51 minutes ago -
Where must Medicare prescription drug plans allow for
participants to fill their prescriptions?
asked 54 minutes ago -
Five moles of monatomic ideal gas have initial pressure 2.50 ×
103 Pa and initial volume...
asked 1 hour ago -
A resistor and the capacitor are used to control the timing in
the RC circuit of...
asked 1 hour ago -
Living in a group could bring several disadvantages to an
individual. What are some of the...
asked 1 hour ago
ADVERTISEMENT