
Homework Answers
IF YOU HAVE ANY DOUBTS COMMENT BELOW I WILL BE THERE TO HELP YOU ALL THE BEST

![@ υーCt2_ 4()-3D.] t-Ru)_ B: C Co,2))](http://img.homeworklib.com/images/099df5ef-35bb-4c1f-b982-f1e2d9b87d9d.png?x-oss-process=image/resize,w_560)

I HOPE YOU UNDERSSTAND..
PLS ..RATE THUMBSUP IT HELPS ME ALOT
THANKS GOODLUCK
THANK YOU....!
Add Answer to:
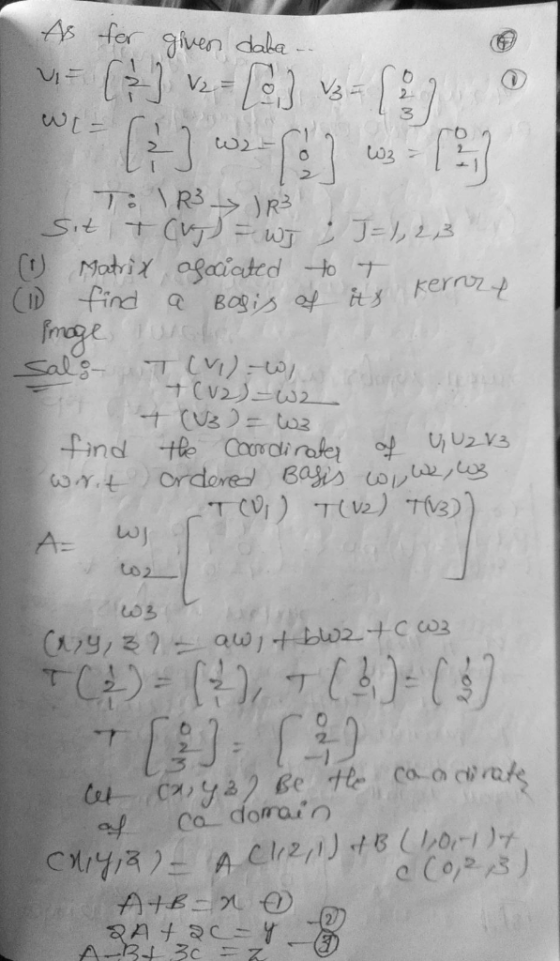
2) Let Let T : R3 - R3 such that T(ij) ,, j 1,2,3. Find the matrix A associated to T in the canonical basis. Find a bas...
Question 1.2 Let T : R3 ? R2 be a linear transformation given by T (x)...
 Question 1.2 Let T : R3 ? R2 be a linear transformation given by T (x) = Ax, where 1 0 2 -1 1 5 1) Find a basis for the kernel of T. 2) Determine the dimension of the kernel of T 3) Find a basis for the image(range) of T. 4) Determine the dimension of the image(range) of T. 5) Determine if it is a surjection or injection or both. 2 6) Determine whether or not v |0|...
Question 1.2 Let T : R3 ? R2 be a linear transformation given by T (x) = Ax, where 1 0 2 -1 1 5 1) Find a basis for the kernel of T. 2) Determine the dimension of the kernel of T 3) Find a basis for the image(range) of T. 4) Determine the dimension of the image(range) of T. 5) Determine if it is a surjection or injection or both. 2 6) Determine whether or not v |0|...
Suppose A is the matrix for T: R3 → R3 relative to the standard basis. Find...
 Suppose A is the matrix for T: R3 → R3 relative to the standard basis. Find the matrix A' for T relative to the basis B': 3 -2 A 4 2 5 B' = {(1,1, -1), (1,-1,1),(-1,1,1)}
Suppose A is the matrix for T: R3 → R3 relative to the standard basis. Find the matrix A' for T relative to the basis B': 3 -2 A 4 2 5 B' = {(1,1, -1), (1,-1,1),(-1,1,1)}
Detailed steps please ->R3 be defined by natural basis of R and let T 1,0,1), (0,1.1).(0,0,1))...
 Detailed steps please
->R3 be defined by natural basis of R and let T 1,0,1), (0,1.1).(0,0,1)) be another basis for R. Find the matrix representing L with respect to a) S. b) S and T d) T e) Find the transition matrix Ps from T- basis to S- basis. f) Find the transition matrix Qr-s from S-basis to T-basis. g) Verify Q is inverse of P by QP PQ I. h) Verify PAP-A
Detailed steps please
->R3 be defined by natural basis of R and let T 1,0,1), (0,1.1).(0,0,1)) be another basis for R. Find the matrix representing L with respect to a) S. b) S and T d) T e) Find the transition matrix Ps from T- basis to S- basis. f) Find the transition matrix Qr-s from S-basis to T-basis. g) Verify Q is inverse of P by QP PQ I. h) Verify PAP-A
Let T R3 R4 be the linear transformation defined by T(π1, Ο2, 73) - ( 3α1...
 Let T R3 R4 be the linear transformation defined by T(π1, Ο2, 73) - ( 3α1 -4 , X3, 12.x2 3.x3, 6x1-25x3, 10x2 + 10x3) (a) Determine the standard matrix representation of T (b) Find a basis for the image of T, Im(T), and determine dim(Im(T)) (c) Find a basis for the kernel of T, ker(T), and determine dim(ker(T))
Let T R3 R4 be the linear transformation defined by T(π1, Ο2, 73) - ( 3α1 -4 , X3, 12.x2 3.x3, 6x1-25x3, 10x2 + 10x3) (a) Determine the standard matrix representation of T (b) Find a basis for the image of T, Im(T), and determine dim(Im(T)) (c) Find a basis for the kernel of T, ker(T), and determine dim(ker(T))
Suppose T: R3–M2.2 is a linear transformation whose action on a basis for R3 is as...
 Suppose T: R3–M2.2 is a linear transformation whose action on a basis for R3 is as follows: 0 -7 -7 -10 -10 T]01- T TI? 2 2 -7 -6 -10 -9 0 1 Give a basis for the kernel of T and the image of T by choosing which of the original vector spaces each is a subset of, and then giving a set of appropriate vectors. Basis of Kernel is a Subset of R3 Number of Vectors: 1 Bker...
Suppose T: R3–M2.2 is a linear transformation whose action on a basis for R3 is as follows: 0 -7 -7 -10 -10 T]01- T TI? 2 2 -7 -6 -10 -9 0 1 Give a basis for the kernel of T and the image of T by choosing which of the original vector spaces each is a subset of, and then giving a set of appropriate vectors. Basis of Kernel is a Subset of R3 Number of Vectors: 1 Bker...
18. Let T be the matrix transformation T -1 2 0 -1 2 2 -1 h...
 18. Let T be the matrix transformation T -1 2 0 -1 2 2 -1 h 2 -3 k 4 a. What are the domain and codomain of T? b. Find the REF of [T]. Hint: You'll need the REF in some of the following questions. -1 -1 -1 -3 (REF of [7]= 0 2 2 4 is given here so that you can correctly answer the following 0 0 h – 2 k-6 questions.) c. Define the range of...
18. Let T be the matrix transformation T -1 2 0 -1 2 2 -1 h 2 -3 k 4 a. What are the domain and codomain of T? b. Find the REF of [T]. Hint: You'll need the REF in some of the following questions. -1 -1 -1 -3 (REF of [7]= 0 2 2 4 is given here so that you can correctly answer the following 0 0 h – 2 k-6 questions.) c. Define the range of...
Find the matrix A' for T relative to the basis B'. T: R3 → R3, T(x,...
 Find the matrix A' for T relative to the basis B'. T: R3 → R3, T(x, y, z) = (x, y, z), B' = {(1, 0, 1), (0, 1, 1), (1, 1, 0)} A' = 11 JITE
Find the matrix A' for T relative to the basis B'. T: R3 → R3, T(x, y, z) = (x, y, z), B' = {(1, 0, 1), (0, 1, 1), (1, 1, 0)} A' = 11 JITE
10 Consider the two basis B-1,1 of R3 (a) Find matrix that changed the coordinates from the basis...
 Please provide specific explanations with each correct answers.
Thanks.
10 Consider the two basis B-1,1 of R3 (a) Find matrix that changed the coordinates from the basis U to the basis B. (b) Let f be the vector which coordinate vector with respect the basis is B- 2. Use the matrix in part (a) to find coordinate vector of with respect to the basis U, i.e., [21.
10 Consider the two basis B-1,1 of R3 (a) Find matrix that changed...
Please provide specific explanations with each correct answers.
Thanks.
10 Consider the two basis B-1,1 of R3 (a) Find matrix that changed the coordinates from the basis U to the basis B. (b) Let f be the vector which coordinate vector with respect the basis is B- 2. Use the matrix in part (a) to find coordinate vector of with respect to the basis U, i.e., [21.
10 Consider the two basis B-1,1 of R3 (a) Find matrix that changed...
[1] (a) Verify that vectors ul 2 | ,u2 -1 . из 0 | are pairwise orthogonal (b) Prove that ũi,u2Ф ...
 [1] (a) Verify that vectors ul 2 | ,u2 -1 . из 0 | are pairwise orthogonal (b) Prove that ũi,u2Ф are linearly independent and hence form a basis of R3. (c) Let PRR3 be the orthogonal projection onto Spansüi, us]. Find bases for the image and kernel of P, without using the matrix of P. Find the rank and nullity (d) Find Pul, Риг, and Риз in a snap. Find the matrix of P with respect to the basis...
[1] (a) Verify that vectors ul 2 | ,u2 -1 . из 0 | are pairwise orthogonal (b) Prove that ũi,u2Ф are linearly independent and hence form a basis of R3. (c) Let PRR3 be the orthogonal projection onto Spansüi, us]. Find bases for the image and kernel of P, without using the matrix of P. Find the rank and nullity (d) Find Pul, Риг, and Риз in a snap. Find the matrix of P with respect to the basis...
Find the matrix A' for T relative to the basis B'. T: R3 R3, T(x, y,...
 Find the matrix A' for T relative to the basis B'. T: R3 R3, T(x, y, z) = (x, y, z), B' = {(1, 0, 1), (0, 1, 1), (1, 1, 0)} 0 A 11 1 0 11 X
Find the matrix A' for T relative to the basis B'. T: R3 R3, T(x, y, z) = (x, y, z), B' = {(1, 0, 1), (0, 1, 1), (1, 1, 0)} 0 A 11 1 0 11 X
 Question 1.2 Let T : R3 ? R2 be a linear transformation given by T (x) = Ax, where 1 0 2 -1 1 5 1) Find a basis for the kernel of T. 2) Determine the dimension of the kernel of T 3) Find a basis for the image(range) of T. 4) Determine the dimension of the image(range) of T. 5) Determine if it is a surjection or injection or both. 2 6) Determine whether or not v |0|...
Question 1.2 Let T : R3 ? R2 be a linear transformation given by T (x) = Ax, where 1 0 2 -1 1 5 1) Find a basis for the kernel of T. 2) Determine the dimension of the kernel of T 3) Find a basis for the image(range) of T. 4) Determine the dimension of the image(range) of T. 5) Determine if it is a surjection or injection or both. 2 6) Determine whether or not v |0|...
 Suppose A is the matrix for T: R3 → R3 relative to the standard basis. Find the matrix A' for T relative to the basis B': 3 -2 A 4 2 5 B' = {(1,1, -1), (1,-1,1),(-1,1,1)}
Suppose A is the matrix for T: R3 → R3 relative to the standard basis. Find the matrix A' for T relative to the basis B': 3 -2 A 4 2 5 B' = {(1,1, -1), (1,-1,1),(-1,1,1)}
 Detailed steps please
->R3 be defined by natural basis of R and let T 1,0,1), (0,1.1).(0,0,1)) be another basis for R. Find the matrix representing L with respect to a) S. b) S and T d) T e) Find the transition matrix Ps from T- basis to S- basis. f) Find the transition matrix Qr-s from S-basis to T-basis. g) Verify Q is inverse of P by QP PQ I. h) Verify PAP-A
Detailed steps please
->R3 be defined by natural basis of R and let T 1,0,1), (0,1.1).(0,0,1)) be another basis for R. Find the matrix representing L with respect to a) S. b) S and T d) T e) Find the transition matrix Ps from T- basis to S- basis. f) Find the transition matrix Qr-s from S-basis to T-basis. g) Verify Q is inverse of P by QP PQ I. h) Verify PAP-A
 Let T R3 R4 be the linear transformation defined by T(π1, Ο2, 73) - ( 3α1 -4 , X3, 12.x2 3.x3, 6x1-25x3, 10x2 + 10x3) (a) Determine the standard matrix representation of T (b) Find a basis for the image of T, Im(T), and determine dim(Im(T)) (c) Find a basis for the kernel of T, ker(T), and determine dim(ker(T))
Let T R3 R4 be the linear transformation defined by T(π1, Ο2, 73) - ( 3α1 -4 , X3, 12.x2 3.x3, 6x1-25x3, 10x2 + 10x3) (a) Determine the standard matrix representation of T (b) Find a basis for the image of T, Im(T), and determine dim(Im(T)) (c) Find a basis for the kernel of T, ker(T), and determine dim(ker(T))
 Suppose T: R3–M2.2 is a linear transformation whose action on a basis for R3 is as follows: 0 -7 -7 -10 -10 T]01- T TI? 2 2 -7 -6 -10 -9 0 1 Give a basis for the kernel of T and the image of T by choosing which of the original vector spaces each is a subset of, and then giving a set of appropriate vectors. Basis of Kernel is a Subset of R3 Number of Vectors: 1 Bker...
Suppose T: R3–M2.2 is a linear transformation whose action on a basis for R3 is as follows: 0 -7 -7 -10 -10 T]01- T TI? 2 2 -7 -6 -10 -9 0 1 Give a basis for the kernel of T and the image of T by choosing which of the original vector spaces each is a subset of, and then giving a set of appropriate vectors. Basis of Kernel is a Subset of R3 Number of Vectors: 1 Bker...
 18. Let T be the matrix transformation T -1 2 0 -1 2 2 -1 h 2 -3 k 4 a. What are the domain and codomain of T? b. Find the REF of [T]. Hint: You'll need the REF in some of the following questions. -1 -1 -1 -3 (REF of [7]= 0 2 2 4 is given here so that you can correctly answer the following 0 0 h – 2 k-6 questions.) c. Define the range of...
18. Let T be the matrix transformation T -1 2 0 -1 2 2 -1 h 2 -3 k 4 a. What are the domain and codomain of T? b. Find the REF of [T]. Hint: You'll need the REF in some of the following questions. -1 -1 -1 -3 (REF of [7]= 0 2 2 4 is given here so that you can correctly answer the following 0 0 h – 2 k-6 questions.) c. Define the range of...
 Find the matrix A' for T relative to the basis B'. T: R3 → R3, T(x, y, z) = (x, y, z), B' = {(1, 0, 1), (0, 1, 1), (1, 1, 0)} A' = 11 JITE
Find the matrix A' for T relative to the basis B'. T: R3 → R3, T(x, y, z) = (x, y, z), B' = {(1, 0, 1), (0, 1, 1), (1, 1, 0)} A' = 11 JITE
 Please provide specific explanations with each correct answers.
Thanks.
10 Consider the two basis B-1,1 of R3 (a) Find matrix that changed the coordinates from the basis U to the basis B. (b) Let f be the vector which coordinate vector with respect the basis is B- 2. Use the matrix in part (a) to find coordinate vector of with respect to the basis U, i.e., [21.
10 Consider the two basis B-1,1 of R3 (a) Find matrix that changed...
Please provide specific explanations with each correct answers.
Thanks.
10 Consider the two basis B-1,1 of R3 (a) Find matrix that changed the coordinates from the basis U to the basis B. (b) Let f be the vector which coordinate vector with respect the basis is B- 2. Use the matrix in part (a) to find coordinate vector of with respect to the basis U, i.e., [21.
10 Consider the two basis B-1,1 of R3 (a) Find matrix that changed...
 [1] (a) Verify that vectors ul 2 | ,u2 -1 . из 0 | are pairwise orthogonal (b) Prove that ũi,u2Ф are linearly independent and hence form a basis of R3. (c) Let PRR3 be the orthogonal projection onto Spansüi, us]. Find bases for the image and kernel of P, without using the matrix of P. Find the rank and nullity (d) Find Pul, Риг, and Риз in a snap. Find the matrix of P with respect to the basis...
[1] (a) Verify that vectors ul 2 | ,u2 -1 . из 0 | are pairwise orthogonal (b) Prove that ũi,u2Ф are linearly independent and hence form a basis of R3. (c) Let PRR3 be the orthogonal projection onto Spansüi, us]. Find bases for the image and kernel of P, without using the matrix of P. Find the rank and nullity (d) Find Pul, Риг, and Риз in a snap. Find the matrix of P with respect to the basis...
 Find the matrix A' for T relative to the basis B'. T: R3 R3, T(x, y, z) = (x, y, z), B' = {(1, 0, 1), (0, 1, 1), (1, 1, 0)} 0 A 11 1 0 11 X
Find the matrix A' for T relative to the basis B'. T: R3 R3, T(x, y, z) = (x, y, z), B' = {(1, 0, 1), (0, 1, 1), (1, 1, 0)} 0 A 11 1 0 11 X
Most questions answered within 3 hours.
-
The college asked 700 students if they wanted a longer spring
break and 600 students said...
asked 43 seconds from now -
Determine the temperature (in Celsius) at which 1.00 mole of an
ideal gas will have a...
asked 23 minutes ago -
Japan’s combination of X and Y
Canada’s combination of X and Y
100x and 0y
50x...
asked 16 minutes ago -
[1] Household statistics include individuals living alone or in
groups in:
A) apartments.
B) military barracks....
asked 26 minutes ago -
What is the % w/v when 80 mL of a 2.0% solution is mixed with 50...
asked 30 minutes ago -
How can I solve the following using a TI83
Claim: Most adults would erase all of...
asked 42 minutes ago -
Analysis of 3-ethyl-3-buten-2-ol gave C, 72.13%; H, 11.92%.
Calculate the percent deviation of these results from...
asked 39 minutes ago -
Which VALS segment is most likely to have a top of the line
brand new (2015)...
asked 43 minutes ago -
Write a program to score the paper-rock-scissor game. Each of
two users types in either P,R...
asked 1 hour ago -
Calculate the equillibrium constent K for a redox reaction that
has E°cell = -.98 V at...
asked 1 hour ago -
A concave spherical mirror has a radius of curvature of
magnitude 19.6 cm.
(a) Find the...
asked 1 hour ago -
3. draw a diagram of the magnetic field:
a. around a long straight wire with a...
asked 1 hour ago