
Homework Answers
Answer #1
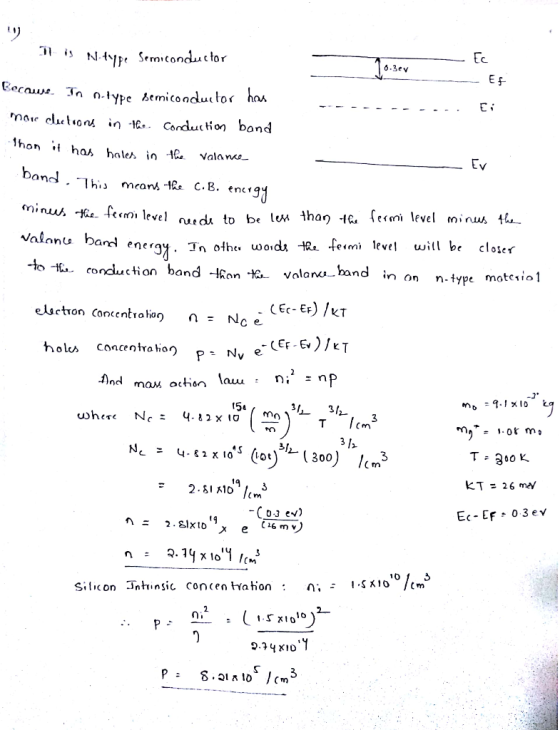
İl i, N type Sern,conductor Ec 6.3ev Ihon i has hole* in 10 valae - ICcm leve energy. Tn othe« woidi tR. feimi level will be closer ocoduction band -Iian -*. valan hand in on n-type holt> concentralio Cn 9,3 kT = 26 mw Ec Ef 0.3 ev 10 Silicon Jntiinsic concen tration: n: - 1.S X1o /cm ni l-SX1010 3
Know the answer?
Add Answer to:
(a) Explain the difference between active and passive sensors for mobile robots. Name one active range sensor and expla...
Not the answer you're looking for?
Ask your own homework help question.
Our experts will answer your question WITHIN MINUTES for Free.
Similar Homework Help Questions
Answer all parts (a) Explain the difference between active and passive sensors for mobile robots. Name one active rang...
 Answer all parts
(a) Explain the difference between active and passive sensors for mobile robots. Name one active range sensor and explain its working principle. (b) Suppose a laser range sensor has 360 degree coverage in a 2D plane. To extract line features from the raw point cloud measurement, what are the main steps? (c) Suppose a robot has a laser range finder of 360 coverage. How would you transform the raw data into a feature space that can be...
Answer all parts
(a) Explain the difference between active and passive sensors for mobile robots. Name one active range sensor and explain its working principle. (b) Suppose a laser range sensor has 360 degree coverage in a 2D plane. To extract line features from the raw point cloud measurement, what are the main steps? (c) Suppose a robot has a laser range finder of 360 coverage. How would you transform the raw data into a feature space that can be...
 Answer all parts
(a) Explain the difference between active and passive sensors for mobile robots. Name one active range sensor and explain its working principle. (b) Suppose a laser range sensor has 360 degree coverage in a 2D plane. To extract line features from the raw point cloud measurement, what are the main steps? (c) Suppose a robot has a laser range finder of 360 coverage. How would you transform the raw data into a feature space that can be...
Answer all parts
(a) Explain the difference between active and passive sensors for mobile robots. Name one active range sensor and explain its working principle. (b) Suppose a laser range sensor has 360 degree coverage in a 2D plane. To extract line features from the raw point cloud measurement, what are the main steps? (c) Suppose a robot has a laser range finder of 360 coverage. How would you transform the raw data into a feature space that can be...
ADVERTISEMENT
Need Online Homework Help?
Ask
a QuestionGet Answers For Free
Most questions answered within 3 hours.
Most questions answered within 3 hours.
ADVERTISEMENT
ADVERTISEMENT
Active Questions
-
Advances in technology have increased our opportunities to
connect with others. Along with the benefits of...
asked 3 minutes ago -
Compute the interest rate at which $500 per month payments
should grow to accumulate savings of...
asked 3 minutes ago -
The following information pertains to a weekly payroll of Texera
Tile Company:
a. The total wages...
asked 6 minutes ago -
Alice has the RSA public key (n, e) = (11413, 251) and private
key d =...
asked 19 minutes ago -
QUESTION 5
A drug or medicine can reach the brain more effectively by
placing the drug...
asked 23 minutes ago -
Developmental biology
A mouse contains a mutation that results in a failure of their
long
bones...
asked 19 minutes ago -
Rammazzotti, Inc., is looking for feedback on company
performance. The company compares the budget for the...
asked 24 minutes ago -
A manufacturer of chocolate chips would like to know whether its
bag filling machine works correctly...
asked 33 minutes ago -
Consider the student registration business process at
your college:
1.)Describe the steps necessary for you to...
asked 39 minutes ago -
when released from rest at point A, an unknown ion moves to
point B. At point...
asked 31 minutes ago -
A stock is expected to pay the following dividends: $1.1
four years from now, $1.4 five...
asked 37 minutes ago -
G=yellow and g=green pea seeds. You cross a heterozygous
yellow-seeded plant with a green-seeded plant to...
asked 39 minutes ago
ADVERTISEMENT