
Homework Answers
Add Answer to:
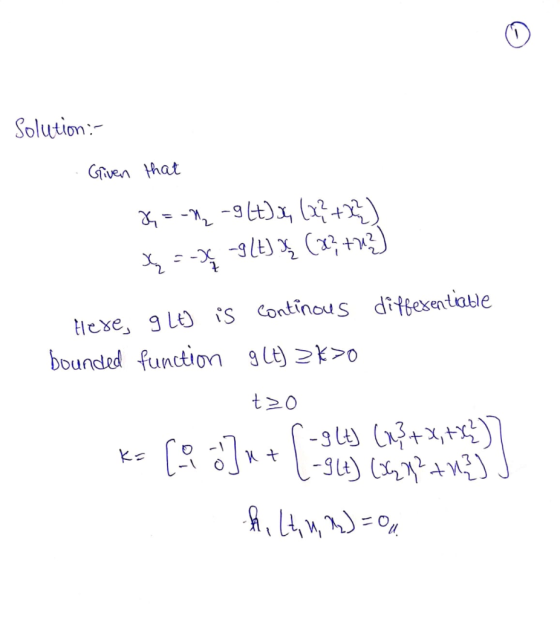
Problem 7: Consider the following non-linear, non-autonomous system Here, g(t) is a continuous, differentiable and bounded...
Problem 2 (25 pts): Consider the following non-linear autonomous system Consider a quadratic Lyap...
 Problem 2 (25 pts): Consider the following non-linear autonomous system Consider a quadratic Lyapunov function in the form And study the stability of the system as function of the parameter k. More specifically 1. Show that the origin is Globally Asymptotically Stable for k 0. 2. Assume kヂ0. Is the origin still stable? Provide an interpretation.
Problem 2 (25 pts): Consider the following non-linear autonomous system Consider a quadratic Lyapunov function in the form And study the stability of the...
Problem 2 (25 pts): Consider the following non-linear autonomous system Consider a quadratic Lyapunov function in the form And study the stability of the system as function of the parameter k. More specifically 1. Show that the origin is Globally Asymptotically Stable for k 0. 2. Assume kヂ0. Is the origin still stable? Provide an interpretation.
Problem 2 (25 pts): Consider the following non-linear autonomous system Consider a quadratic Lyapunov function in the form And study the stability of the...
Problem 1 (25 pts): Consider the following non-linear autonomous system Where a>o,b0,c 0,d >0 and...
 Problem 1 (25 pts): Consider the following non-linear autonomous system Where a>o,b0,c 0,d >0 and k >a. Consider the following Lyapunov Function: Where p >0. Answer the following questions: . Is V(x) a good candidate Lyapunov function? Explain 2. Is the origin at least stable? Explain (Hint: set p c) 3. Show that the system is Globally Asymptotically Stable.
Problem 1 (25 pts): Consider the following non-linear autonomous system Where a>o,b0,c 0,d >0 and k >a. Consider the following Lyapunov...
Problem 1 (25 pts): Consider the following non-linear autonomous system Where a>o,b0,c 0,d >0 and k >a. Consider the following Lyapunov Function: Where p >0. Answer the following questions: . Is V(x) a good candidate Lyapunov function? Explain 2. Is the origin at least stable? Explain (Hint: set p c) 3. Show that the system is Globally Asymptotically Stable.
Problem 1 (25 pts): Consider the following non-linear autonomous system Where a>o,b0,c 0,d >0 and k >a. Consider the following Lyapunov...
Problem 1 (25 pts): Consider the following non-linear autonomous systerm Where a 0,b0.c O,d > 0 a...
 Problem 1 (25 pts): Consider the following non-linear autonomous systerm Where a 0,b0.c O,d > 0 and k> a. Consider the following Lyapunov Function Where p >0. Answer the following questions: 1. 1s V (x) a good candidate Lyapunov function? Explairn 2. Is the origin at least stable? Explain (Hint: set p c) 3. Show that the system is Globally Asymptotically Stable
Problem 1 (25 pts): Consider the following non-linear autonomous systerm Where a 0,b0.c O,d > 0 and k>...
Problem 1 (25 pts): Consider the following non-linear autonomous systerm Where a 0,b0.c O,d > 0 and k> a. Consider the following Lyapunov Function Where p >0. Answer the following questions: 1. 1s V (x) a good candidate Lyapunov function? Explairn 2. Is the origin at least stable? Explain (Hint: set p c) 3. Show that the system is Globally Asymptotically Stable
Problem 1 (25 pts): Consider the following non-linear autonomous systerm Where a 0,b0.c O,d > 0 and k>...
Problems: (1) Answer True or False to each of the following. You must substantiate your answers. (A) A differentiable function is always globally Lipschitz. (B) The trajectory of the system , r(0) is...
 Problems: (1) Answer True or False to each of the following. You must substantiate your answers. (A) A differentiable function is always globally Lipschitz. (B) The trajectory of the system , r(0) is bounded for all t 0 (C) A linear tine-varying system á(t) A(t)a(t) is asymptotically stable around the origin if and only if it is uniformly exponentially stable around the origin. (D) Given the equation x f(x), and suppose that xe 0 is an exponentially stable equilibrium point...
Problems: (1) Answer True or False to each of the following. You must substantiate your answers. (A) A differentiable function is always globally Lipschitz. (B) The trajectory of the system , r(0) is bounded for all t 0 (C) A linear tine-varying system á(t) A(t)a(t) is asymptotically stable around the origin if and only if it is uniformly exponentially stable around the origin. (D) Given the equation x f(x), and suppose that xe 0 is an exponentially stable equilibrium point...
Closed loop Controller - Dynamical System Consider the following continuous non-linear dynamical system: x1 = (11-2x1)ex1...
 Closed loop Controller - Dynamical System
Consider the following continuous non-linear dynamical system: x1 = (11-2x1)ex1 2(2x1-4x2)e*z The system is driven by the following closed-loop controller: 1. For all values of K, find the equilibrium points of the closed loop system, i.e. find the equilibrium point as K varies between-co and +co 2. Consider the origin of the system. Determine the character of the origin for all values of the parameter K. Determine specifically for what values of K the...
Closed loop Controller - Dynamical System
Consider the following continuous non-linear dynamical system: x1 = (11-2x1)ex1 2(2x1-4x2)e*z The system is driven by the following closed-loop controller: 1. For all values of K, find the equilibrium points of the closed loop system, i.e. find the equilibrium point as K varies between-co and +co 2. Consider the origin of the system. Determine the character of the origin for all values of the parameter K. Determine specifically for what values of K the...
Consider the following nonlinear dynamic system, with a possible potential candidate function. Use the given Lyapunov function, us such function (Lyapunov Direct) approach to; (5 Marks): Show that th...
 Consider the following nonlinear dynamic system, with a possible potential candidate function. Use the given Lyapunov function, us such function (Lyapunov Direct) approach to; (5 Marks): Show that the system is globally stable around the origin (5 Marks): The origin is globally asymptotically stable. (5 Marks): Only SKETCH a possible Phase Plan, as based on (a), (b). a. b. c.
Consider the following nonlinear dynamic system, with a possible potential candidate function. Use the given Lyapunov function, us such function...
Consider the following nonlinear dynamic system, with a possible potential candidate function. Use the given Lyapunov function, us such function (Lyapunov Direct) approach to; (5 Marks): Show that the system is globally stable around the origin (5 Marks): The origin is globally asymptotically stable. (5 Marks): Only SKETCH a possible Phase Plan, as based on (a), (b). a. b. c.
Consider the following nonlinear dynamic system, with a possible potential candidate function. Use the given Lyapunov function, us such function...
4. The origin (0,0) is a critical point of the first order autonomous system x'(t)- Ax(t)...
 4. The origin (0,0) is a critical point of the first order autonomous system x'(t)- Ax(t) The origin can classified as asymptotically stable if Re(A) < 0 and stable if Re(A)0 for all eigenvalues λ of A. The origin is unstable if there exists an eigenvalue λ of A where Re(A) >0. For the following systems, classify the origin 1 -3x(C) b, x'(t)=11-3 1-3x(t)
4. The origin (0,0) is a critical point of the first order autonomous system x'(t)- Ax(t) The origin can classified as asymptotically stable if Re(A) < 0 and stable if Re(A)0 for all eigenvalues λ of A. The origin is unstable if there exists an eigenvalue λ of A where Re(A) >0. For the following systems, classify the origin 1 -3x(C) b, x'(t)=11-3 1-3x(t)
Problem 3 Consider the following system: 2 213+w. where w denotes control input. Here we design a control system based on passivity. (a) Suppose that w =-r1 + x2 + 2.123 + u for a new control input u...
 Problem 3 Consider the following system: 2 213+w. where w denotes control input. Here we design a control system based on passivity. (a) Suppose that w =-r1 + x2 + 2.123 + u for a new control input u. Show that the state equation can be written as the following cascade form: i fa(2) +F(z)y, 22u yT2, where z = [ri, r3]T e R2. Find the expression for fa (z) and F(z). (b) Show that when y0, the origin 0...
Problem 3 Consider the following system: 2 213+w. where w denotes control input. Here we design a control system based on passivity. (a) Suppose that w =-r1 + x2 + 2.123 + u for a new control input u. Show that the state equation can be written as the following cascade form: i fa(2) +F(z)y, 22u yT2, where z = [ri, r3]T e R2. Find the expression for fa (z) and F(z). (b) Show that when y0, the origin 0...
Consider the nonhomogenous system a' (t) = A(t)x(t) + B(t), where A(t) and B(t) are continuous...
 Consider the nonhomogenous system a' (t) = A(t)x(t) + B(t), where A(t) and B(t) are continuous on 0 < to < t < 0, prove that if all solutions are bounded, then they are stable.
Consider the nonhomogenous system a' (t) = A(t)x(t) + B(t), where A(t) and B(t) are continuous on 0 < to < t < 0, prove that if all solutions are bounded, then they are stable.
Problem 1: For the following non-linear autonomous system 1 = X1 (1-X2) X2 = 2x1-12 nstruct...
 Problem 1: For the following non-linear autonomous system 1 = X1 (1-X2) X2 = 2x1-12 nstruct (i.e. sketch) the phase-portrait using linearization techniques. Discuss the qualitative behavior of the system. Justify your answers. Co
Problem 1: For the following non-linear autonomous system 1 = X1 (1-X2) X2 = 2x1-12 nstruct (i.e. sketch) the phase-portrait using linearization techniques. Discuss the qualitative behavior of the system. Justify your answers. Co
 Problem 2 (25 pts): Consider the following non-linear autonomous system Consider a quadratic Lyapunov function in the form And study the stability of the system as function of the parameter k. More specifically 1. Show that the origin is Globally Asymptotically Stable for k 0. 2. Assume kヂ0. Is the origin still stable? Provide an interpretation.
Problem 2 (25 pts): Consider the following non-linear autonomous system Consider a quadratic Lyapunov function in the form And study the stability of the...
Problem 2 (25 pts): Consider the following non-linear autonomous system Consider a quadratic Lyapunov function in the form And study the stability of the system as function of the parameter k. More specifically 1. Show that the origin is Globally Asymptotically Stable for k 0. 2. Assume kヂ0. Is the origin still stable? Provide an interpretation.
Problem 2 (25 pts): Consider the following non-linear autonomous system Consider a quadratic Lyapunov function in the form And study the stability of the...
 Problem 1 (25 pts): Consider the following non-linear autonomous system Where a>o,b0,c 0,d >0 and k >a. Consider the following Lyapunov Function: Where p >0. Answer the following questions: . Is V(x) a good candidate Lyapunov function? Explain 2. Is the origin at least stable? Explain (Hint: set p c) 3. Show that the system is Globally Asymptotically Stable.
Problem 1 (25 pts): Consider the following non-linear autonomous system Where a>o,b0,c 0,d >0 and k >a. Consider the following Lyapunov...
Problem 1 (25 pts): Consider the following non-linear autonomous system Where a>o,b0,c 0,d >0 and k >a. Consider the following Lyapunov Function: Where p >0. Answer the following questions: . Is V(x) a good candidate Lyapunov function? Explain 2. Is the origin at least stable? Explain (Hint: set p c) 3. Show that the system is Globally Asymptotically Stable.
Problem 1 (25 pts): Consider the following non-linear autonomous system Where a>o,b0,c 0,d >0 and k >a. Consider the following Lyapunov...
 Problem 1 (25 pts): Consider the following non-linear autonomous systerm Where a 0,b0.c O,d > 0 and k> a. Consider the following Lyapunov Function Where p >0. Answer the following questions: 1. 1s V (x) a good candidate Lyapunov function? Explairn 2. Is the origin at least stable? Explain (Hint: set p c) 3. Show that the system is Globally Asymptotically Stable
Problem 1 (25 pts): Consider the following non-linear autonomous systerm Where a 0,b0.c O,d > 0 and k>...
Problem 1 (25 pts): Consider the following non-linear autonomous systerm Where a 0,b0.c O,d > 0 and k> a. Consider the following Lyapunov Function Where p >0. Answer the following questions: 1. 1s V (x) a good candidate Lyapunov function? Explairn 2. Is the origin at least stable? Explain (Hint: set p c) 3. Show that the system is Globally Asymptotically Stable
Problem 1 (25 pts): Consider the following non-linear autonomous systerm Where a 0,b0.c O,d > 0 and k>...
 Problems: (1) Answer True or False to each of the following. You must substantiate your answers. (A) A differentiable function is always globally Lipschitz. (B) The trajectory of the system , r(0) is bounded for all t 0 (C) A linear tine-varying system á(t) A(t)a(t) is asymptotically stable around the origin if and only if it is uniformly exponentially stable around the origin. (D) Given the equation x f(x), and suppose that xe 0 is an exponentially stable equilibrium point...
Problems: (1) Answer True or False to each of the following. You must substantiate your answers. (A) A differentiable function is always globally Lipschitz. (B) The trajectory of the system , r(0) is bounded for all t 0 (C) A linear tine-varying system á(t) A(t)a(t) is asymptotically stable around the origin if and only if it is uniformly exponentially stable around the origin. (D) Given the equation x f(x), and suppose that xe 0 is an exponentially stable equilibrium point...
 Closed loop Controller - Dynamical System
Consider the following continuous non-linear dynamical system: x1 = (11-2x1)ex1 2(2x1-4x2)e*z The system is driven by the following closed-loop controller: 1. For all values of K, find the equilibrium points of the closed loop system, i.e. find the equilibrium point as K varies between-co and +co 2. Consider the origin of the system. Determine the character of the origin for all values of the parameter K. Determine specifically for what values of K the...
Closed loop Controller - Dynamical System
Consider the following continuous non-linear dynamical system: x1 = (11-2x1)ex1 2(2x1-4x2)e*z The system is driven by the following closed-loop controller: 1. For all values of K, find the equilibrium points of the closed loop system, i.e. find the equilibrium point as K varies between-co and +co 2. Consider the origin of the system. Determine the character of the origin for all values of the parameter K. Determine specifically for what values of K the...
 Consider the following nonlinear dynamic system, with a possible potential candidate function. Use the given Lyapunov function, us such function (Lyapunov Direct) approach to; (5 Marks): Show that the system is globally stable around the origin (5 Marks): The origin is globally asymptotically stable. (5 Marks): Only SKETCH a possible Phase Plan, as based on (a), (b). a. b. c.
Consider the following nonlinear dynamic system, with a possible potential candidate function. Use the given Lyapunov function, us such function...
Consider the following nonlinear dynamic system, with a possible potential candidate function. Use the given Lyapunov function, us such function (Lyapunov Direct) approach to; (5 Marks): Show that the system is globally stable around the origin (5 Marks): The origin is globally asymptotically stable. (5 Marks): Only SKETCH a possible Phase Plan, as based on (a), (b). a. b. c.
Consider the following nonlinear dynamic system, with a possible potential candidate function. Use the given Lyapunov function, us such function...
 4. The origin (0,0) is a critical point of the first order autonomous system x'(t)- Ax(t) The origin can classified as asymptotically stable if Re(A) < 0 and stable if Re(A)0 for all eigenvalues λ of A. The origin is unstable if there exists an eigenvalue λ of A where Re(A) >0. For the following systems, classify the origin 1 -3x(C) b, x'(t)=11-3 1-3x(t)
4. The origin (0,0) is a critical point of the first order autonomous system x'(t)- Ax(t) The origin can classified as asymptotically stable if Re(A) < 0 and stable if Re(A)0 for all eigenvalues λ of A. The origin is unstable if there exists an eigenvalue λ of A where Re(A) >0. For the following systems, classify the origin 1 -3x(C) b, x'(t)=11-3 1-3x(t)
 Problem 3 Consider the following system: 2 213+w. where w denotes control input. Here we design a control system based on passivity. (a) Suppose that w =-r1 + x2 + 2.123 + u for a new control input u. Show that the state equation can be written as the following cascade form: i fa(2) +F(z)y, 22u yT2, where z = [ri, r3]T e R2. Find the expression for fa (z) and F(z). (b) Show that when y0, the origin 0...
Problem 3 Consider the following system: 2 213+w. where w denotes control input. Here we design a control system based on passivity. (a) Suppose that w =-r1 + x2 + 2.123 + u for a new control input u. Show that the state equation can be written as the following cascade form: i fa(2) +F(z)y, 22u yT2, where z = [ri, r3]T e R2. Find the expression for fa (z) and F(z). (b) Show that when y0, the origin 0...
 Consider the nonhomogenous system a' (t) = A(t)x(t) + B(t), where A(t) and B(t) are continuous on 0 < to < t < 0, prove that if all solutions are bounded, then they are stable.
Consider the nonhomogenous system a' (t) = A(t)x(t) + B(t), where A(t) and B(t) are continuous on 0 < to < t < 0, prove that if all solutions are bounded, then they are stable.
 Problem 1: For the following non-linear autonomous system 1 = X1 (1-X2) X2 = 2x1-12 nstruct (i.e. sketch) the phase-portrait using linearization techniques. Discuss the qualitative behavior of the system. Justify your answers. Co
Problem 1: For the following non-linear autonomous system 1 = X1 (1-X2) X2 = 2x1-12 nstruct (i.e. sketch) the phase-portrait using linearization techniques. Discuss the qualitative behavior of the system. Justify your answers. Co
Most questions answered within 3 hours.
-
Calculate the pH of each of the following solutions.
0.50 M HBr
3.1×10−4 M KOH
4.2×10−5...
asked 1 hour ago -
For the year ended December 31, Depot Max’s cost of merchandise
sold was $85,600. Inventory at the...
asked 1 hour ago -
Week 10 - Professional Memo Assignment
Professional Memo Assignment
Your mission for this week, should you...
asked 1 hour ago -
Write a Python program that stores the data for each
player on the team, and it...
asked 1 hour ago -
In
the last 3 months, mike never knows when he is going to get his
allowance...
asked 2 hours ago -
Is Ca(OH)2 a Bronsted base, Lewis base, or both? Why?
asked 2 hours ago -
1A- Why don’t voters complain about U.S. tariffs on imported
sugar?
Because sugar is only a...
asked 2 hours ago -
Cash Payback Period
Primera Banco is evaluating two capital investment proposals for
a drive-up ATM kiosk,...
asked 2 hours ago -
Create a button in Swift (Xcode) that will create a charge,
create a charge using Stripe's...
asked 2 hours ago -
The reaction rate of CO and NO2 in the reaction
CO(g) + NO2(g) → CO2(g) +...
asked 2 hours ago -
Imagine that a chemist puts 6.40 mol each of
C3H8 and O2 in a 1.00-L container...
asked 2 hours ago -
How much money should be invested today in order to have $8340
at the end of...
asked 2 hours ago