
Homework Answers



Add Answer to:
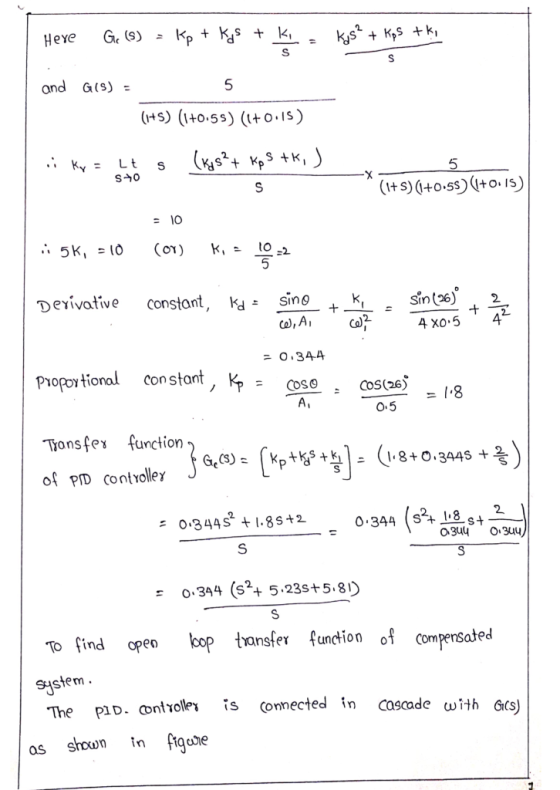
PD & PID controller design Consider a unity feedback system with open loop transfer function, G(s)...
Q3. Consider a single loop unity feedback control system of the open loop transfer function (a) Find the range of values of the gain K and the parameter p so that: (i) The overshoot is less than 10%....
 Q3. Consider a single loop unity feedback control system of the open loop transfer function (a) Find the range of values of the gain K and the parameter p so that: (i) The overshoot is less than 10%. (ii)The settling time is less than 4 seconds Note: , 4.6 M. = exp CO 40% (b)What are the three elements in a PID controller? Considering each in turn, explain the main ways in which varying the parameters affects the closed-loop system...
Q3. Consider a single loop unity feedback control system of the open loop transfer function (a) Find the range of values of the gain K and the parameter p so that: (i) The overshoot is less than 10%. (ii)The settling time is less than 4 seconds Note: , 4.6 M. = exp CO 40% (b)What are the three elements in a PID controller? Considering each in turn, explain the main ways in which varying the parameters affects the closed-loop system...
K and consider a PI s+4 A unity feedback system has an open loop transfer function G(s) [4] S+a controller Ge(s) S Sele...
 K and consider a PI s+4 A unity feedback system has an open loop transfer function G(s) [4] S+a controller Ge(s) S Select the values of K and a to achieve a) (i) Peak overshoot of about 20% (ii) Settling time (2% bases) ~ 1 sec b) For the values of K and a found in part (a), calculate the unit ramp input steady state error
K and consider a PI s+4 A unity feedback system has an open loop...
K and consider a PI s+4 A unity feedback system has an open loop transfer function G(s) [4] S+a controller Ge(s) S Select the values of K and a to achieve a) (i) Peak overshoot of about 20% (ii) Settling time (2% bases) ~ 1 sec b) For the values of K and a found in part (a), calculate the unit ramp input steady state error
K and consider a PI s+4 A unity feedback system has an open loop...
urgent! II Lead-Lag Controller Design A plant has the open-loop transfer function with unity feedback: 20(s +1) G, (s) s(10s +D(0.1258 +D(0.05s +1)(0.02s +1) Design a phase lag-lead compensator th...
 urgent!
II Lead-Lag Controller Design A plant has the open-loop transfer function with unity feedback: 20(s +1) G, (s) s(10s +D(0.1258 +D(0.05s +1)(0.02s +1) Design a phase lag-lead compensator that satisfies the following specifications must by the compensated system 1. The steady-state error for a unit ramp input must be 0.002; 2. The compensated phase margin must be approximately 48; must be approximately 25 rad/sec.
II Lead-Lag Controller Design A plant has the open-loop transfer function with unity feedback: 20(s...
urgent!
II Lead-Lag Controller Design A plant has the open-loop transfer function with unity feedback: 20(s +1) G, (s) s(10s +D(0.1258 +D(0.05s +1)(0.02s +1) Design a phase lag-lead compensator that satisfies the following specifications must by the compensated system 1. The steady-state error for a unit ramp input must be 0.002; 2. The compensated phase margin must be approximately 48; must be approximately 25 rad/sec.
II Lead-Lag Controller Design A plant has the open-loop transfer function with unity feedback: 20(s...
[7] Sketch the root locus for the unity feedback system whose open loop transfer function is K G(s) Draw the root lo...
 [7] Sketch the root locus for the unity feedback system whose open loop transfer function is K G(s) Draw the root locus of the system with the gain Kas a variable. s(s+4) (s2+4s+20) Determine asymptotes, centroid, breakaway point, angle of departure, and the gain at which root locus crosses ja-axis. A control system with type-0 process and a PID controller is shown below. Design the [8 parameters of the PID controller so that the following specifications are satisfied. =100 a)...
[7] Sketch the root locus for the unity feedback system whose open loop transfer function is K G(s) Draw the root locus of the system with the gain Kas a variable. s(s+4) (s2+4s+20) Determine asymptotes, centroid, breakaway point, angle of departure, and the gain at which root locus crosses ja-axis. A control system with type-0 process and a PID controller is shown below. Design the [8 parameters of the PID controller so that the following specifications are satisfied. =100 a)...
17. Consider unity feedback system with uncompensated forward transfer function a given by: K G(s) s+3)(s 6) The system...
 17. Consider unity feedback system with uncompensated forward transfer function a given by: K G(s) s+3)(s 6) The system requires a damping ratio of 0.5. If the design point is at -1.54 j2.66, design a PI controller to drive the steady-state error of the response to zero
17. Consider unity feedback system with uncompensated forward transfer function a given by: K G(s) s+3)(s 6) The system requires a damping ratio of 0.5. If the design point is at -1.54 j2.66,...
17. Consider unity feedback system with uncompensated forward transfer function a given by: K G(s) s+3)(s 6) The system requires a damping ratio of 0.5. If the design point is at -1.54 j2.66, design a PI controller to drive the steady-state error of the response to zero
17. Consider unity feedback system with uncompensated forward transfer function a given by: K G(s) s+3)(s 6) The system requires a damping ratio of 0.5. If the design point is at -1.54 j2.66,...
Problem 4. The open-loop transfer function of a unity feedback system is 20 G(s) S+1.5) (s +3.5) ...
 Problem 4. The open-loop transfer function of a unity feedback system is 20 G(s) S+1.5) (s +3.5) (s +15) (a) Design a lag-lead compensator for G(s) using root locus so that the closed-loop system satisfies the design specifications. (b) Design a PID compensator for G(s) using root locus so that the closed-loop system satisfies the design specifications. Design specifications -SSE to a unit step reference input is less than 0.02. Overshoot is less than 20%. Peak time is less than...
Problem 4. The open-loop transfer function of a unity feedback system is 20 G(s) S+1.5) (s +3.5) (s +15) (a) Design a lag-lead compensator for G(s) using root locus so that the closed-loop system satisfies the design specifications. (b) Design a PID compensator for G(s) using root locus so that the closed-loop system satisfies the design specifications. Design specifications -SSE to a unit step reference input is less than 0.02. Overshoot is less than 20%. Peak time is less than...
1. Consider a unity feedback control system with the transfer function G(s) = 1/[s(s+ 2)] in...
1. Consider a unity feedback control system with the transfer function G(s) = 1/[s(s+ 2)] in the forward path. (a) Design a proportional controller that yields a stable system with percent overshoot less that 5% for the step input (b) Find settling time and peak time of the closed-loop system designed in part (a); (c) Design a PD compensator that reduces the settling time computed in (b) by a factor of 4 while keeping the percent overshoot less that 5%...
4.35 Consider the feedback control system with the plant transfer function G(s) = (5+0.1)(5+0.5) (a) Design...
 4.35 Consider the feedback control system with the plant transfer function G(s) = (5+0.1)(5+0.5) (a) Design a proportional controller so the closed-loop system has damping of 5 = 0.707. Under what conditions on kp is the closed-loop system stable? (b) Design a PI controller so that the closed-loop system has no over- shoot. Under what conditions on (kp, kt) is the closed-loop system is stable? (©) Design a PID controller such that the settling time is less than 1.7 sec.
4.35 Consider the feedback control system with the plant transfer function G(s) = (5+0.1)(5+0.5) (a) Design a proportional controller so the closed-loop system has damping of 5 = 0.707. Under what conditions on kp is the closed-loop system stable? (b) Design a PI controller so that the closed-loop system has no over- shoot. Under what conditions on (kp, kt) is the closed-loop system is stable? (©) Design a PID controller such that the settling time is less than 1.7 sec.
please solve If a system has the open-loop transfer function G(s) s(s+25n) with unity feedback, then the closed-loop tr...
 please solve
If a system has the open-loop transfer function G(s) s(s+25n) with unity feedback, then the closed-loop transfer function is given b T(s) s2+20ns+wf Verify the values of the PM shown in Fig. 6.36 for = 0.1,0.4, and 0.7. Figure 6.36 Damping ratio versus 1.0 0.8 PM 2 0.6 0,4 0.2 0 0° 10° 20° 30° 40° 50 60° 70° 80° Phase margin Damping ratio,
If a system has the open-loop transfer function G(s) s(s+25n) with unity feedback, then...
please solve
If a system has the open-loop transfer function G(s) s(s+25n) with unity feedback, then the closed-loop transfer function is given b T(s) s2+20ns+wf Verify the values of the PM shown in Fig. 6.36 for = 0.1,0.4, and 0.7. Figure 6.36 Damping ratio versus 1.0 0.8 PM 2 0.6 0,4 0.2 0 0° 10° 20° 30° 40° 50 60° 70° 80° Phase margin Damping ratio,
If a system has the open-loop transfer function G(s) s(s+25n) with unity feedback, then...
Problem 4. The open-loop transfer function of a unity feedback system is: 20 (s+1.5)(s 3.5) (s 15...
 Problem 4. The open-loop transfer function of a unity feedback system is: 20 (s+1.5)(s 3.5) (s 15) G(s) (a) Design a lag-lead compensator for G(s) using root locus so that the closed-loop system satisfies the design specifications (b) Design a PID compensator for G (s) using root locus so that the clos ed-loop system satisfies the design specifications. Design specifications .SSE to a unit step reference input is less than 0.02. Overshoot is less than 20% Peak time is less...
Problem 4. The open-loop transfer function of a unity feedback system is: 20 (s+1.5)(s 3.5) (s 15) G(s) (a) Design a lag-lead compensator for G(s) using root locus so that the closed-loop system satisfies the design specifications (b) Design a PID compensator for G (s) using root locus so that the clos ed-loop system satisfies the design specifications. Design specifications .SSE to a unit step reference input is less than 0.02. Overshoot is less than 20% Peak time is less...
 Q3. Consider a single loop unity feedback control system of the open loop transfer function (a) Find the range of values of the gain K and the parameter p so that: (i) The overshoot is less than 10%. (ii)The settling time is less than 4 seconds Note: , 4.6 M. = exp CO 40% (b)What are the three elements in a PID controller? Considering each in turn, explain the main ways in which varying the parameters affects the closed-loop system...
Q3. Consider a single loop unity feedback control system of the open loop transfer function (a) Find the range of values of the gain K and the parameter p so that: (i) The overshoot is less than 10%. (ii)The settling time is less than 4 seconds Note: , 4.6 M. = exp CO 40% (b)What are the three elements in a PID controller? Considering each in turn, explain the main ways in which varying the parameters affects the closed-loop system...
 K and consider a PI s+4 A unity feedback system has an open loop transfer function G(s) [4] S+a controller Ge(s) S Select the values of K and a to achieve a) (i) Peak overshoot of about 20% (ii) Settling time (2% bases) ~ 1 sec b) For the values of K and a found in part (a), calculate the unit ramp input steady state error
K and consider a PI s+4 A unity feedback system has an open loop...
K and consider a PI s+4 A unity feedback system has an open loop transfer function G(s) [4] S+a controller Ge(s) S Select the values of K and a to achieve a) (i) Peak overshoot of about 20% (ii) Settling time (2% bases) ~ 1 sec b) For the values of K and a found in part (a), calculate the unit ramp input steady state error
K and consider a PI s+4 A unity feedback system has an open loop...
 urgent!
II Lead-Lag Controller Design A plant has the open-loop transfer function with unity feedback: 20(s +1) G, (s) s(10s +D(0.1258 +D(0.05s +1)(0.02s +1) Design a phase lag-lead compensator that satisfies the following specifications must by the compensated system 1. The steady-state error for a unit ramp input must be 0.002; 2. The compensated phase margin must be approximately 48; must be approximately 25 rad/sec.
II Lead-Lag Controller Design A plant has the open-loop transfer function with unity feedback: 20(s...
urgent!
II Lead-Lag Controller Design A plant has the open-loop transfer function with unity feedback: 20(s +1) G, (s) s(10s +D(0.1258 +D(0.05s +1)(0.02s +1) Design a phase lag-lead compensator that satisfies the following specifications must by the compensated system 1. The steady-state error for a unit ramp input must be 0.002; 2. The compensated phase margin must be approximately 48; must be approximately 25 rad/sec.
II Lead-Lag Controller Design A plant has the open-loop transfer function with unity feedback: 20(s...
 [7] Sketch the root locus for the unity feedback system whose open loop transfer function is K G(s) Draw the root locus of the system with the gain Kas a variable. s(s+4) (s2+4s+20) Determine asymptotes, centroid, breakaway point, angle of departure, and the gain at which root locus crosses ja-axis. A control system with type-0 process and a PID controller is shown below. Design the [8 parameters of the PID controller so that the following specifications are satisfied. =100 a)...
[7] Sketch the root locus for the unity feedback system whose open loop transfer function is K G(s) Draw the root locus of the system with the gain Kas a variable. s(s+4) (s2+4s+20) Determine asymptotes, centroid, breakaway point, angle of departure, and the gain at which root locus crosses ja-axis. A control system with type-0 process and a PID controller is shown below. Design the [8 parameters of the PID controller so that the following specifications are satisfied. =100 a)...
 17. Consider unity feedback system with uncompensated forward transfer function a given by: K G(s) s+3)(s 6) The system requires a damping ratio of 0.5. If the design point is at -1.54 j2.66, design a PI controller to drive the steady-state error of the response to zero
17. Consider unity feedback system with uncompensated forward transfer function a given by: K G(s) s+3)(s 6) The system requires a damping ratio of 0.5. If the design point is at -1.54 j2.66,...
17. Consider unity feedback system with uncompensated forward transfer function a given by: K G(s) s+3)(s 6) The system requires a damping ratio of 0.5. If the design point is at -1.54 j2.66, design a PI controller to drive the steady-state error of the response to zero
17. Consider unity feedback system with uncompensated forward transfer function a given by: K G(s) s+3)(s 6) The system requires a damping ratio of 0.5. If the design point is at -1.54 j2.66,...
 Problem 4. The open-loop transfer function of a unity feedback system is 20 G(s) S+1.5) (s +3.5) (s +15) (a) Design a lag-lead compensator for G(s) using root locus so that the closed-loop system satisfies the design specifications. (b) Design a PID compensator for G(s) using root locus so that the closed-loop system satisfies the design specifications. Design specifications -SSE to a unit step reference input is less than 0.02. Overshoot is less than 20%. Peak time is less than...
Problem 4. The open-loop transfer function of a unity feedback system is 20 G(s) S+1.5) (s +3.5) (s +15) (a) Design a lag-lead compensator for G(s) using root locus so that the closed-loop system satisfies the design specifications. (b) Design a PID compensator for G(s) using root locus so that the closed-loop system satisfies the design specifications. Design specifications -SSE to a unit step reference input is less than 0.02. Overshoot is less than 20%. Peak time is less than...
 4.35 Consider the feedback control system with the plant transfer function G(s) = (5+0.1)(5+0.5) (a) Design a proportional controller so the closed-loop system has damping of 5 = 0.707. Under what conditions on kp is the closed-loop system stable? (b) Design a PI controller so that the closed-loop system has no over- shoot. Under what conditions on (kp, kt) is the closed-loop system is stable? (©) Design a PID controller such that the settling time is less than 1.7 sec.
4.35 Consider the feedback control system with the plant transfer function G(s) = (5+0.1)(5+0.5) (a) Design a proportional controller so the closed-loop system has damping of 5 = 0.707. Under what conditions on kp is the closed-loop system stable? (b) Design a PI controller so that the closed-loop system has no over- shoot. Under what conditions on (kp, kt) is the closed-loop system is stable? (©) Design a PID controller such that the settling time is less than 1.7 sec.
 please solve
If a system has the open-loop transfer function G(s) s(s+25n) with unity feedback, then the closed-loop transfer function is given b T(s) s2+20ns+wf Verify the values of the PM shown in Fig. 6.36 for = 0.1,0.4, and 0.7. Figure 6.36 Damping ratio versus 1.0 0.8 PM 2 0.6 0,4 0.2 0 0° 10° 20° 30° 40° 50 60° 70° 80° Phase margin Damping ratio,
If a system has the open-loop transfer function G(s) s(s+25n) with unity feedback, then...
please solve
If a system has the open-loop transfer function G(s) s(s+25n) with unity feedback, then the closed-loop transfer function is given b T(s) s2+20ns+wf Verify the values of the PM shown in Fig. 6.36 for = 0.1,0.4, and 0.7. Figure 6.36 Damping ratio versus 1.0 0.8 PM 2 0.6 0,4 0.2 0 0° 10° 20° 30° 40° 50 60° 70° 80° Phase margin Damping ratio,
If a system has the open-loop transfer function G(s) s(s+25n) with unity feedback, then...
 Problem 4. The open-loop transfer function of a unity feedback system is: 20 (s+1.5)(s 3.5) (s 15) G(s) (a) Design a lag-lead compensator for G(s) using root locus so that the closed-loop system satisfies the design specifications (b) Design a PID compensator for G (s) using root locus so that the clos ed-loop system satisfies the design specifications. Design specifications .SSE to a unit step reference input is less than 0.02. Overshoot is less than 20% Peak time is less...
Problem 4. The open-loop transfer function of a unity feedback system is: 20 (s+1.5)(s 3.5) (s 15) G(s) (a) Design a lag-lead compensator for G(s) using root locus so that the closed-loop system satisfies the design specifications (b) Design a PID compensator for G (s) using root locus so that the clos ed-loop system satisfies the design specifications. Design specifications .SSE to a unit step reference input is less than 0.02. Overshoot is less than 20% Peak time is less...
Most questions answered within 3 hours.
-
Briefly describe an aspect of the strengths perspective that is
consistent with your own understanding of...
asked 1 minute ago -
Step by step method of using Sparse Identification of Nonlinear
Dynamics (SINDy) to model your own...
asked 8 minutes ago -
3) What are the typical social structures in a global city?
asked 3 hours ago -
Luther Corporation
Consolidated Balance Sheet
December 31, 2019 and 2018 (in $ millions)
Assets
2019
2018...
asked 3 hours ago -
(Expected rate of return and risk) Carter Inc. is evaluating a
security. Calculate the investment’s expected...
asked 5 hours ago -
What specific indicators can point to lack of progress for
African Americans in American society?
asked 6 hours ago -
1-The Electrons in a beam are moving at 2.7×108 m/s in an
electric field of 15000...
asked 7 hours ago -
A gas tank is a vertical cylinder. It has a radius of 1m, a
height of...
asked 7 hours ago -
Accent Software faces the following conditions. All of these
support Accent’s use of a market-penetration pricing...
asked 8 hours ago -
A mathematically inclined friend emails you the following
instructions: "Meet me in the cafeteria the first...
asked 8 hours ago -
A monopoly sells in two countries . The demand curves in the two
countries are p1...
asked 9 hours ago -
A .15kg rubber ball is bounced off a wall. Before hitting the
wall, the ball moves...
asked 10 hours ago