
Homework Answers
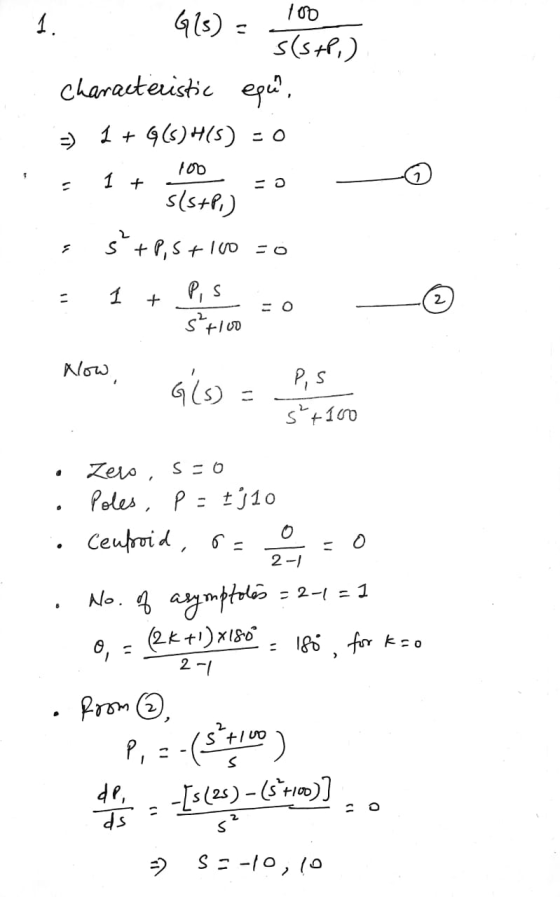
![>> G = tf([0 1 0], [1 0 100]) G = --------- s^2 + 100 Continuous-time transfer function. >> rlocus (G)](http://img.homeworklib.com/questions/ca70de80-2966-11eb-8454-bdcf1a732494.png?x-oss-process=image/resize,w_560)

Add Answer to:
1. A system with unity feedback is shown below. The feed-forward transfer function is G(s). Sketch...
[7] Sketch the root locus for the unity feedback system whose open loop transfer function is K G(s) Draw the root lo...
 [7] Sketch the root locus for the unity feedback system whose open loop transfer function is K G(s) Draw the root locus of the system with the gain Kas a variable. s(s+4) (s2+4s+20) Determine asymptotes, centroid, breakaway point, angle of departure, and the gain at which root locus crosses ja-axis. A control system with type-0 process and a PID controller is shown below. Design the [8 parameters of the PID controller so that the following specifications are satisfied. =100 a)...
[7] Sketch the root locus for the unity feedback system whose open loop transfer function is K G(s) Draw the root locus of the system with the gain Kas a variable. s(s+4) (s2+4s+20) Determine asymptotes, centroid, breakaway point, angle of departure, and the gain at which root locus crosses ja-axis. A control system with type-0 process and a PID controller is shown below. Design the [8 parameters of the PID controller so that the following specifications are satisfied. =100 a)...
Consider the unity feedback system is given below R(S) C(s) G(s) with transfer function: G() =...
 Consider the unity feedback system is given below R(S) C(s) G(s) with transfer function: G() = K(+2) s(s+ 1/s + 3)(+5) a) Sketch the root locus. Clearly indicate any asymptotes. b) Find the value of the gain K, that will make the system marginally stable. c) Find the value of the gain K, for which the closed-loop transfer function will have a pole on the real axis at (-0.5).
Consider the unity feedback system is given below R(S) C(s) G(s) with transfer function: G() = K(+2) s(s+ 1/s + 3)(+5) a) Sketch the root locus. Clearly indicate any asymptotes. b) Find the value of the gain K, that will make the system marginally stable. c) Find the value of the gain K, for which the closed-loop transfer function will have a pole on the real axis at (-0.5).
2. Consider the unity feedback negative system with an open-loop function G(S)-KS. a. Plot the locations...
 2. Consider the unity feedback negative system with an open-loop function G(S)-KS. a. Plot the locations of open-loop poles with X and zeros with O on an s-plane. b. Find the number of segments in the root locus diagram based on the number of poles and zeros. c. The breakaway point (the point at which the two real poles meet and diverge to become complex conjugates) occurs when K = 0.02276. Show that the closed-loop system has repeated poles for...
2. Consider the unity feedback negative system with an open-loop function G(S)-KS. a. Plot the locations of open-loop poles with X and zeros with O on an s-plane. b. Find the number of segments in the root locus diagram based on the number of poles and zeros. c. The breakaway point (the point at which the two real poles meet and diverge to become complex conjugates) occurs when K = 0.02276. Show that the closed-loop system has repeated poles for...
1. Given the unity feedback system, where K(s+1(s 2) 1)(s-4) G(s) do the following: (a) Find the ...
 1. Given the unity feedback system, where K(s+1(s 2) 1)(s-4) G(s) do the following: (a) Find the root locus form. (b) Sketch the root locus. (c) Find the value of K such that the system is stable. (d) Find one value of K such that the closed-loop has a settling time less than or equal to 4 second and the percent of overshoot is less than or equal to 10 with the aid of MATLAB
1. Given the unity feedback...
1. Given the unity feedback system, where K(s+1(s 2) 1)(s-4) G(s) do the following: (a) Find the root locus form. (b) Sketch the root locus. (c) Find the value of K such that the system is stable. (d) Find one value of K such that the closed-loop has a settling time less than or equal to 4 second and the percent of overshoot is less than or equal to 10 with the aid of MATLAB
1. Given the unity feedback...
A second-order process is described by its transfer function G(s) = (s+1)(843) and a PI controlle...
 A second-order process is described by its transfer function G(s) = (s+1)(843) and a PI controller by Consider feedback control with unit feedback gain as shown in Figure 1 A disturbance D(s) exists, and to achieve zero steady-state error, a small integral component is applied. Technical limitations restrict the controller gain kp to values of 0.2 or less. The goal is to examine the influence of the controller parameter k on the dynamic response. D(s) Controller Process X(s) Y(s) Figure...
A second-order process is described by its transfer function G(s) = (s+1)(843) and a PI controller by Consider feedback control with unit feedback gain as shown in Figure 1 A disturbance D(s) exists, and to achieve zero steady-state error, a small integral component is applied. Technical limitations restrict the controller gain kp to values of 0.2 or less. The goal is to examine the influence of the controller parameter k on the dynamic response. D(s) Controller Process X(s) Y(s) Figure...
Problem 3: Consider a unity feedback system with a plant model given by 10(s- 5) and a controller...
 Problem 3: Consider a unity feedback system with a plant model given by 10(s- 5) and a controller given by s + p for K 0 and some real z and p. a) Use the root-locus technique to determine the sign of z and p so that the closed-loop system is stable for all K E (0, K) for some Ku> 0. b) Sketch the possible forms of the root-locus in terms of the pole and zero locations of Ge(s)....
Problem 3: Consider a unity feedback system with a plant model given by 10(s- 5) and a controller given by s + p for K 0 and some real z and p. a) Use the root-locus technique to determine the sign of z and p so that the closed-loop system is stable for all K E (0, K) for some Ku> 0. b) Sketch the possible forms of the root-locus in terms of the pole and zero locations of Ge(s)....
A unity feedback closed loop control system is displayed in Figure 4. (a) Assume that the control...
 Please solve as a MATLAB code.
A unity feedback closed loop control system is displayed in Figure 4. (a) Assume that the controller is given by G (s) 2. Based on the lsim function of MATLAB, calculate and obtain the graph of the response for (t) at. Here a 0.5°/s. Find the height error after 10 seconds, (b) In order to reduce the steady-state error, substitute G (s) with the following controller This is a Proportional-Integral (PI) controller. Repeat part...
Please solve as a MATLAB code.
A unity feedback closed loop control system is displayed in Figure 4. (a) Assume that the controller is given by G (s) 2. Based on the lsim function of MATLAB, calculate and obtain the graph of the response for (t) at. Here a 0.5°/s. Find the height error after 10 seconds, (b) In order to reduce the steady-state error, substitute G (s) with the following controller This is a Proportional-Integral (PI) controller. Repeat part...
Problem 3 A unity feedback system has the loop transfer function G(s) = Kata) s(s +...
 Problem 3 A unity feedback system has the loop transfer function G(s) = Kata) s(s + (a) Find the breakway and entry points on the real axis. (b) Find the gain and the roots when the real part of the complex roots is located at -2 (c) Sketch the root locus. Problem 4 The forward path G(s) of a unity feedback system with input R(s) and output Y (s) is given by G(o) 106I) (a) What is the type of...
Problem 3 A unity feedback system has the loop transfer function G(s) = Kata) s(s + (a) Find the breakway and entry points on the real axis. (b) Find the gain and the roots when the real part of the complex roots is located at -2 (c) Sketch the root locus. Problem 4 The forward path G(s) of a unity feedback system with input R(s) and output Y (s) is given by G(o) 106I) (a) What is the type of...
17. Consider unity feedback system with uncompensated forward transfer function a given by: K G(s) s+3)(s 6) The system...
 17. Consider unity feedback system with uncompensated forward transfer function a given by: K G(s) s+3)(s 6) The system requires a damping ratio of 0.5. If the design point is at -1.54 j2.66, design a PI controller to drive the steady-state error of the response to zero
17. Consider unity feedback system with uncompensated forward transfer function a given by: K G(s) s+3)(s 6) The system requires a damping ratio of 0.5. If the design point is at -1.54 j2.66,...
17. Consider unity feedback system with uncompensated forward transfer function a given by: K G(s) s+3)(s 6) The system requires a damping ratio of 0.5. If the design point is at -1.54 j2.66, design a PI controller to drive the steady-state error of the response to zero
17. Consider unity feedback system with uncompensated forward transfer function a given by: K G(s) s+3)(s 6) The system requires a damping ratio of 0.5. If the design point is at -1.54 j2.66,...
actions in the forward path of a unity-feedback closed-loop system (CLS) are given E(s) = K + 25 , G(s)-8 (a) Plot t...
 actions in the forward path of a unity-feedback closed-loop system (CLS) are given E(s) = K + 25 , G(s)-8 (a) Plot the root locus of the CLS for K20. (b) Determine K so that the CLS has a pair of complex poles with ( = 0.6 ) Find the unit sterp sponse of the CL.S with K as abhowe
actions in the forward path of a unity-feedback closed-loop system (CLS) are given E(s) = K + 25 , G(s)-8...
actions in the forward path of a unity-feedback closed-loop system (CLS) are given E(s) = K + 25 , G(s)-8 (a) Plot the root locus of the CLS for K20. (b) Determine K so that the CLS has a pair of complex poles with ( = 0.6 ) Find the unit sterp sponse of the CL.S with K as abhowe
actions in the forward path of a unity-feedback closed-loop system (CLS) are given E(s) = K + 25 , G(s)-8...
 [7] Sketch the root locus for the unity feedback system whose open loop transfer function is K G(s) Draw the root locus of the system with the gain Kas a variable. s(s+4) (s2+4s+20) Determine asymptotes, centroid, breakaway point, angle of departure, and the gain at which root locus crosses ja-axis. A control system with type-0 process and a PID controller is shown below. Design the [8 parameters of the PID controller so that the following specifications are satisfied. =100 a)...
[7] Sketch the root locus for the unity feedback system whose open loop transfer function is K G(s) Draw the root locus of the system with the gain Kas a variable. s(s+4) (s2+4s+20) Determine asymptotes, centroid, breakaway point, angle of departure, and the gain at which root locus crosses ja-axis. A control system with type-0 process and a PID controller is shown below. Design the [8 parameters of the PID controller so that the following specifications are satisfied. =100 a)...
 Consider the unity feedback system is given below R(S) C(s) G(s) with transfer function: G() = K(+2) s(s+ 1/s + 3)(+5) a) Sketch the root locus. Clearly indicate any asymptotes. b) Find the value of the gain K, that will make the system marginally stable. c) Find the value of the gain K, for which the closed-loop transfer function will have a pole on the real axis at (-0.5).
Consider the unity feedback system is given below R(S) C(s) G(s) with transfer function: G() = K(+2) s(s+ 1/s + 3)(+5) a) Sketch the root locus. Clearly indicate any asymptotes. b) Find the value of the gain K, that will make the system marginally stable. c) Find the value of the gain K, for which the closed-loop transfer function will have a pole on the real axis at (-0.5).
 2. Consider the unity feedback negative system with an open-loop function G(S)-KS. a. Plot the locations of open-loop poles with X and zeros with O on an s-plane. b. Find the number of segments in the root locus diagram based on the number of poles and zeros. c. The breakaway point (the point at which the two real poles meet and diverge to become complex conjugates) occurs when K = 0.02276. Show that the closed-loop system has repeated poles for...
2. Consider the unity feedback negative system with an open-loop function G(S)-KS. a. Plot the locations of open-loop poles with X and zeros with O on an s-plane. b. Find the number of segments in the root locus diagram based on the number of poles and zeros. c. The breakaway point (the point at which the two real poles meet and diverge to become complex conjugates) occurs when K = 0.02276. Show that the closed-loop system has repeated poles for...
 1. Given the unity feedback system, where K(s+1(s 2) 1)(s-4) G(s) do the following: (a) Find the root locus form. (b) Sketch the root locus. (c) Find the value of K such that the system is stable. (d) Find one value of K such that the closed-loop has a settling time less than or equal to 4 second and the percent of overshoot is less than or equal to 10 with the aid of MATLAB
1. Given the unity feedback...
1. Given the unity feedback system, where K(s+1(s 2) 1)(s-4) G(s) do the following: (a) Find the root locus form. (b) Sketch the root locus. (c) Find the value of K such that the system is stable. (d) Find one value of K such that the closed-loop has a settling time less than or equal to 4 second and the percent of overshoot is less than or equal to 10 with the aid of MATLAB
1. Given the unity feedback...
 A second-order process is described by its transfer function G(s) = (s+1)(843) and a PI controller by Consider feedback control with unit feedback gain as shown in Figure 1 A disturbance D(s) exists, and to achieve zero steady-state error, a small integral component is applied. Technical limitations restrict the controller gain kp to values of 0.2 or less. The goal is to examine the influence of the controller parameter k on the dynamic response. D(s) Controller Process X(s) Y(s) Figure...
A second-order process is described by its transfer function G(s) = (s+1)(843) and a PI controller by Consider feedback control with unit feedback gain as shown in Figure 1 A disturbance D(s) exists, and to achieve zero steady-state error, a small integral component is applied. Technical limitations restrict the controller gain kp to values of 0.2 or less. The goal is to examine the influence of the controller parameter k on the dynamic response. D(s) Controller Process X(s) Y(s) Figure...
 Problem 3: Consider a unity feedback system with a plant model given by 10(s- 5) and a controller given by s + p for K 0 and some real z and p. a) Use the root-locus technique to determine the sign of z and p so that the closed-loop system is stable for all K E (0, K) for some Ku> 0. b) Sketch the possible forms of the root-locus in terms of the pole and zero locations of Ge(s)....
Problem 3: Consider a unity feedback system with a plant model given by 10(s- 5) and a controller given by s + p for K 0 and some real z and p. a) Use the root-locus technique to determine the sign of z and p so that the closed-loop system is stable for all K E (0, K) for some Ku> 0. b) Sketch the possible forms of the root-locus in terms of the pole and zero locations of Ge(s)....
 Please solve as a MATLAB code.
A unity feedback closed loop control system is displayed in Figure 4. (a) Assume that the controller is given by G (s) 2. Based on the lsim function of MATLAB, calculate and obtain the graph of the response for (t) at. Here a 0.5°/s. Find the height error after 10 seconds, (b) In order to reduce the steady-state error, substitute G (s) with the following controller This is a Proportional-Integral (PI) controller. Repeat part...
Please solve as a MATLAB code.
A unity feedback closed loop control system is displayed in Figure 4. (a) Assume that the controller is given by G (s) 2. Based on the lsim function of MATLAB, calculate and obtain the graph of the response for (t) at. Here a 0.5°/s. Find the height error after 10 seconds, (b) In order to reduce the steady-state error, substitute G (s) with the following controller This is a Proportional-Integral (PI) controller. Repeat part...
 Problem 3 A unity feedback system has the loop transfer function G(s) = Kata) s(s + (a) Find the breakway and entry points on the real axis. (b) Find the gain and the roots when the real part of the complex roots is located at -2 (c) Sketch the root locus. Problem 4 The forward path G(s) of a unity feedback system with input R(s) and output Y (s) is given by G(o) 106I) (a) What is the type of...
Problem 3 A unity feedback system has the loop transfer function G(s) = Kata) s(s + (a) Find the breakway and entry points on the real axis. (b) Find the gain and the roots when the real part of the complex roots is located at -2 (c) Sketch the root locus. Problem 4 The forward path G(s) of a unity feedback system with input R(s) and output Y (s) is given by G(o) 106I) (a) What is the type of...
 17. Consider unity feedback system with uncompensated forward transfer function a given by: K G(s) s+3)(s 6) The system requires a damping ratio of 0.5. If the design point is at -1.54 j2.66, design a PI controller to drive the steady-state error of the response to zero
17. Consider unity feedback system with uncompensated forward transfer function a given by: K G(s) s+3)(s 6) The system requires a damping ratio of 0.5. If the design point is at -1.54 j2.66,...
17. Consider unity feedback system with uncompensated forward transfer function a given by: K G(s) s+3)(s 6) The system requires a damping ratio of 0.5. If the design point is at -1.54 j2.66, design a PI controller to drive the steady-state error of the response to zero
17. Consider unity feedback system with uncompensated forward transfer function a given by: K G(s) s+3)(s 6) The system requires a damping ratio of 0.5. If the design point is at -1.54 j2.66,...
 actions in the forward path of a unity-feedback closed-loop system (CLS) are given E(s) = K + 25 , G(s)-8 (a) Plot the root locus of the CLS for K20. (b) Determine K so that the CLS has a pair of complex poles with ( = 0.6 ) Find the unit sterp sponse of the CL.S with K as abhowe
actions in the forward path of a unity-feedback closed-loop system (CLS) are given E(s) = K + 25 , G(s)-8...
actions in the forward path of a unity-feedback closed-loop system (CLS) are given E(s) = K + 25 , G(s)-8 (a) Plot the root locus of the CLS for K20. (b) Determine K so that the CLS has a pair of complex poles with ( = 0.6 ) Find the unit sterp sponse of the CL.S with K as abhowe
actions in the forward path of a unity-feedback closed-loop system (CLS) are given E(s) = K + 25 , G(s)-8...
Most questions answered within 3 hours.
-
Combustion of an unknown compound containing only carbon and
hydrogen produces 54.9 g of CO₂ and...
asked 8 minutes ago -
A basketball player achieves a hang time, the total time of
flight, of 0.748 s when...
asked 9 minutes ago -
A processor of carrots cuts the green top off each carrot,
washes the carrots, and inserts...
asked 21 minutes ago -
Please help me find the coefficient of kinetic and static
friction of two masses (500kg and...
asked 17 minutes ago -
Stanley Department Stores reported net income of $815,000 for
the year ended December 31, 2018.
Additional...
asked 22 minutes ago -
Below are the node_struct, link, list_struct and
list as defined in class and in hw3: typedef...
asked 21 minutes ago -
BA Corp is issuing a 10-year bond with a coupon rate of 6.00
percent. The interest...
asked 29 minutes ago -
How does a cell control the cell cycle? Explain 4 different ways
that cell cycle is...
asked 34 minutes ago -
We have to write some code to simulate
rabbits population growth in Australia. We have determined...
asked 34 minutes ago -
Presidential Aviation has provided charter flights to a wide
array of customers, including business travelers worldwide....
asked 48 minutes ago -
Discuss the significance of accounting systems in generating
reliable accounting information (200 words)
asked 54 minutes ago -
McCracken Aerial,
Inc., produces and sells a unique type of TV antenna. The company
has just...
asked 1 hour ago