
Homework Answers

Add Answer to:
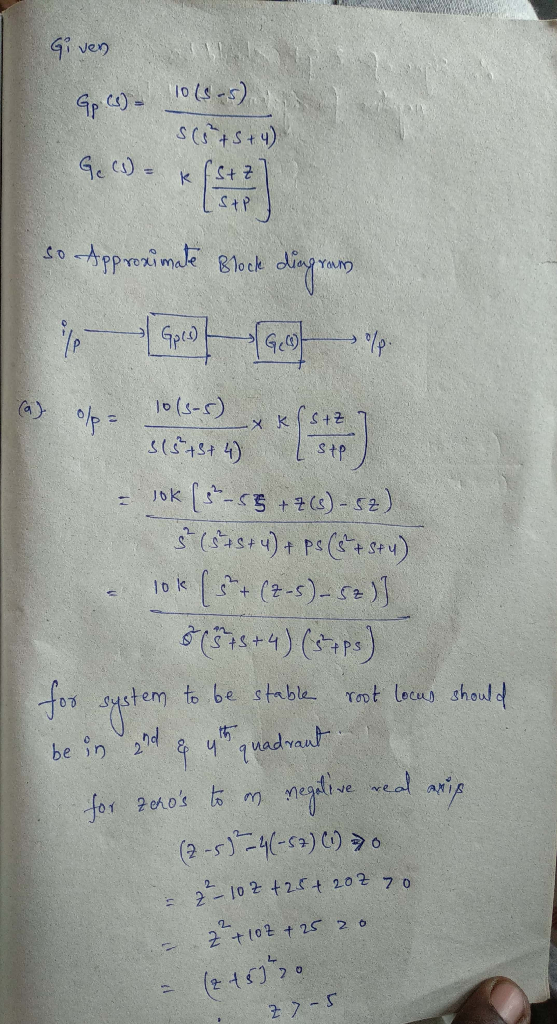
Problem 3: Consider a unity feedback system with a plant model given by 10(s- 5) and a controller...
Problem 5: Suppose that you are to design a unity gain feedback controller for a first order plant. The plant...
 Problem 5: Suppose that you are to design a unity gain feedback controller for a first order plant. The plant and controller respectively take the form ,s+ p where K> 0, p. z are parameters to be specified. (a) Using root-locus methods, specify some p and z for which it is possible to make the closed-loop system strictly stable. Include a sketch of the closed-loop root locus, as well as the corresponding range of gains K for which the system...
Problem 5: Suppose that you are to design a unity gain feedback controller for a first order plant. The plant and controller respectively take the form ,s+ p where K> 0, p. z are parameters to be specified. (a) Using root-locus methods, specify some p and z for which it is possible to make the closed-loop system strictly stable. Include a sketch of the closed-loop root locus, as well as the corresponding range of gains K for which the system...
Consider the unity feedback system is given below R(S) C(s) G(s) with transfer function: G() =...
 Consider the unity feedback system is given below R(S) C(s) G(s) with transfer function: G() = K(+2) s(s+ 1/s + 3)(+5) a) Sketch the root locus. Clearly indicate any asymptotes. b) Find the value of the gain K, that will make the system marginally stable. c) Find the value of the gain K, for which the closed-loop transfer function will have a pole on the real axis at (-0.5).
Consider the unity feedback system is given below R(S) C(s) G(s) with transfer function: G() = K(+2) s(s+ 1/s + 3)(+5) a) Sketch the root locus. Clearly indicate any asymptotes. b) Find the value of the gain K, that will make the system marginally stable. c) Find the value of the gain K, for which the closed-loop transfer function will have a pole on the real axis at (-0.5).
Consider the following controller in a unity feedback configuration: (s + 10) C(s) = k· (s...
 Consider the following controller in a unity feedback configuration: (s + 10) C(s) = k· (s + 5) (a) (by hand) Using an approximation for the plant P(s) a 11 S +2)(s2 + 5s + 25) determine the proper L(s) and sketch an accurate Root Locus plot (b) (by hand) Once you have established the Root Locus, determine the range of k values that guarantees closed-loop stability using the L(jw) method along with the Root Locus plot.
Consider the following controller in a unity feedback configuration: (s + 10) C(s) = k· (s + 5) (a) (by hand) Using an approximation for the plant P(s) a 11 S +2)(s2 + 5s + 25) determine the proper L(s) and sketch an accurate Root Locus plot (b) (by hand) Once you have established the Root Locus, determine the range of k values that guarantees closed-loop stability using the L(jw) method along with the Root Locus plot.
Problem 2 For the unity feedback system below in Figure 2 G(s) Figure 2. With (8+2) G(s) = (a) Sk...
 Problem 2 For the unity feedback system below in Figure 2 G(s) Figure 2. With (8+2) G(s) = (a) Sketch the root locus. 1. Draw the finite open-loop poles and zeros. ii. Draw the real-axis root locus iii. Draw the asymptotes and root locus branches. (b) Find the value of gain that will make the system marginally stable. (c) Find the value of gain for which the closed-loop transfer function will have a pole on the real axis at s...
Problem 2 For the unity feedback system below in Figure 2 G(s) Figure 2. With (8+2) G(s) = (a) Sketch the root locus. 1. Draw the finite open-loop poles and zeros. ii. Draw the real-axis root locus iii. Draw the asymptotes and root locus branches. (b) Find the value of gain that will make the system marginally stable. (c) Find the value of gain for which the closed-loop transfer function will have a pole on the real axis at s...
3. Given the unity feedback system, where G(s) = s(s +2) (s+3)(s +4) do the following:...
 3. Given the unity feedback system, where G(s) = s(s +2) (s+3)(s +4) do the following: (a) Sketch the root locus (b) Find the asymptotes c) Find the value of gain that will make the system marginally stable (d) Find the value of gain for which the closed-loop transfer function will have a pole on the real axis at-0.5
3. Given the unity feedback system, where G(s) = s(s +2) (s+3)(s +4) do the following: (a) Sketch the root locus (b) Find the asymptotes c) Find the value of gain that will make the system marginally stable (d) Find the value of gain for which the closed-loop transfer function will have a pole on the real axis at-0.5
Consider a unity feedback control architecture where P(s) = 1/s^2 and C(s) = K * ((s + z)/(s + p)...
 Consider a unity feedback control architecture where P(s) =
1/s^2 and C(s) = K * ((s + z)/(s + p)) . It is desired to design
the controller to place the dominant closed-loop poles at sd = −2 ±
2j. Fix the pole of the compensator at −20 rad/sec and use root
locus techniques to find values of z and K to place the closed–loop
poles at sd .
Problem 4 (placing a zero) Consider a unity feedback control architecture...
Consider a unity feedback control architecture where P(s) =
1/s^2 and C(s) = K * ((s + z)/(s + p)) . It is desired to design
the controller to place the dominant closed-loop poles at sd = −2 ±
2j. Fix the pole of the compensator at −20 rad/sec and use root
locus techniques to find values of z and K to place the closed–loop
poles at sd .
Problem 4 (placing a zero) Consider a unity feedback control architecture...
Feedback Control of Dynamic System Please Let me know how to solve this problem (5) For the following unity-feedback control system, Y(s) R(s)E D(s) (s+ 2) we want to design a controller D(s) D(s)+a)...
 Feedback Control of Dynamic System
Please Let me know how to solve this problem
(5) For the following unity-feedback control system, Y(s) R(s)E D(s) (s+ 2) we want to design a controller D(s) D(s)+a) that makes the closed-loop stable for certain positive K values. Design the parameters a and b to satisfy the design condition through the root- locus method
(5) For the following unity-feedback control system, Y(s) R(s)E D(s) (s+ 2) we want to design a controller D(s) D(s)+a)...
Feedback Control of Dynamic System
Please Let me know how to solve this problem
(5) For the following unity-feedback control system, Y(s) R(s)E D(s) (s+ 2) we want to design a controller D(s) D(s)+a) that makes the closed-loop stable for certain positive K values. Design the parameters a and b to satisfy the design condition through the root- locus method
(5) For the following unity-feedback control system, Y(s) R(s)E D(s) (s+ 2) we want to design a controller D(s) D(s)+a)...
1. Given the unity feedback system, where K(s+1(s 2) 1)(s-4) G(s) do the following: (a) Find the ...
 1. Given the unity feedback system, where K(s+1(s 2) 1)(s-4) G(s) do the following: (a) Find the root locus form. (b) Sketch the root locus. (c) Find the value of K such that the system is stable. (d) Find one value of K such that the closed-loop has a settling time less than or equal to 4 second and the percent of overshoot is less than or equal to 10 with the aid of MATLAB
1. Given the unity feedback...
1. Given the unity feedback system, where K(s+1(s 2) 1)(s-4) G(s) do the following: (a) Find the root locus form. (b) Sketch the root locus. (c) Find the value of K such that the system is stable. (d) Find one value of K such that the closed-loop has a settling time less than or equal to 4 second and the percent of overshoot is less than or equal to 10 with the aid of MATLAB
1. Given the unity feedback...
1. A system with unity feedback is shown below. The feed-forward transfer function is G(s). Sketch...
 1. A system with unity feedback is shown below. The feed-forward transfer function is G(s). Sketch the root locus for the variations in the values of pi. R(9)+ 66) 69? Fig. 1: Unity-feedback closed-loop system G(s)= 100 s(s+ p) 2. The following closed-loop systems in Fig. 2 and Fig. 3 are operating with a damping ratio of 0.866 (S =0.866). The system in Fig. 2 doesn't have a PI controller, while the one in Fig. 3 does. Gain Plant R(S)...
1. A system with unity feedback is shown below. The feed-forward transfer function is G(s). Sketch the root locus for the variations in the values of pi. R(9)+ 66) 69? Fig. 1: Unity-feedback closed-loop system G(s)= 100 s(s+ p) 2. The following closed-loop systems in Fig. 2 and Fig. 3 are operating with a damping ratio of 0.866 (S =0.866). The system in Fig. 2 doesn't have a PI controller, while the one in Fig. 3 does. Gain Plant R(S)...
3) (10 pts) Consider the unity feedback system as shown in Figure 1, where s(s+1)(s+5s+6) (a) For...
 3) (10 pts) Consider the unity feedback system as shown in Figure 1, where s(s+1)(s+5s+6) (a) For C(s) K, sketch the root locus (b) Based on your root locus in (a), can you find a value of gain K, such that the closed- loop system will have a settling time of 1 second under a step input? Justify your answer.
3) (10 pts) Consider the unity feedback system as shown in Figure 1, where s(s+1)(s+5s+6) (a) For C(s) K, sketch...
3) (10 pts) Consider the unity feedback system as shown in Figure 1, where s(s+1)(s+5s+6) (a) For C(s) K, sketch the root locus (b) Based on your root locus in (a), can you find a value of gain K, such that the closed- loop system will have a settling time of 1 second under a step input? Justify your answer.
3) (10 pts) Consider the unity feedback system as shown in Figure 1, where s(s+1)(s+5s+6) (a) For C(s) K, sketch...
 Problem 5: Suppose that you are to design a unity gain feedback controller for a first order plant. The plant and controller respectively take the form ,s+ p where K> 0, p. z are parameters to be specified. (a) Using root-locus methods, specify some p and z for which it is possible to make the closed-loop system strictly stable. Include a sketch of the closed-loop root locus, as well as the corresponding range of gains K for which the system...
Problem 5: Suppose that you are to design a unity gain feedback controller for a first order plant. The plant and controller respectively take the form ,s+ p where K> 0, p. z are parameters to be specified. (a) Using root-locus methods, specify some p and z for which it is possible to make the closed-loop system strictly stable. Include a sketch of the closed-loop root locus, as well as the corresponding range of gains K for which the system...
 Consider the unity feedback system is given below R(S) C(s) G(s) with transfer function: G() = K(+2) s(s+ 1/s + 3)(+5) a) Sketch the root locus. Clearly indicate any asymptotes. b) Find the value of the gain K, that will make the system marginally stable. c) Find the value of the gain K, for which the closed-loop transfer function will have a pole on the real axis at (-0.5).
Consider the unity feedback system is given below R(S) C(s) G(s) with transfer function: G() = K(+2) s(s+ 1/s + 3)(+5) a) Sketch the root locus. Clearly indicate any asymptotes. b) Find the value of the gain K, that will make the system marginally stable. c) Find the value of the gain K, for which the closed-loop transfer function will have a pole on the real axis at (-0.5).
 Consider the following controller in a unity feedback configuration: (s + 10) C(s) = k· (s + 5) (a) (by hand) Using an approximation for the plant P(s) a 11 S +2)(s2 + 5s + 25) determine the proper L(s) and sketch an accurate Root Locus plot (b) (by hand) Once you have established the Root Locus, determine the range of k values that guarantees closed-loop stability using the L(jw) method along with the Root Locus plot.
Consider the following controller in a unity feedback configuration: (s + 10) C(s) = k· (s + 5) (a) (by hand) Using an approximation for the plant P(s) a 11 S +2)(s2 + 5s + 25) determine the proper L(s) and sketch an accurate Root Locus plot (b) (by hand) Once you have established the Root Locus, determine the range of k values that guarantees closed-loop stability using the L(jw) method along with the Root Locus plot.
 Problem 2 For the unity feedback system below in Figure 2 G(s) Figure 2. With (8+2) G(s) = (a) Sketch the root locus. 1. Draw the finite open-loop poles and zeros. ii. Draw the real-axis root locus iii. Draw the asymptotes and root locus branches. (b) Find the value of gain that will make the system marginally stable. (c) Find the value of gain for which the closed-loop transfer function will have a pole on the real axis at s...
Problem 2 For the unity feedback system below in Figure 2 G(s) Figure 2. With (8+2) G(s) = (a) Sketch the root locus. 1. Draw the finite open-loop poles and zeros. ii. Draw the real-axis root locus iii. Draw the asymptotes and root locus branches. (b) Find the value of gain that will make the system marginally stable. (c) Find the value of gain for which the closed-loop transfer function will have a pole on the real axis at s...
 3. Given the unity feedback system, where G(s) = s(s +2) (s+3)(s +4) do the following: (a) Sketch the root locus (b) Find the asymptotes c) Find the value of gain that will make the system marginally stable (d) Find the value of gain for which the closed-loop transfer function will have a pole on the real axis at-0.5
3. Given the unity feedback system, where G(s) = s(s +2) (s+3)(s +4) do the following: (a) Sketch the root locus (b) Find the asymptotes c) Find the value of gain that will make the system marginally stable (d) Find the value of gain for which the closed-loop transfer function will have a pole on the real axis at-0.5
 Consider a unity feedback control architecture where P(s) =
1/s^2 and C(s) = K * ((s + z)/(s + p)) . It is desired to design
the controller to place the dominant closed-loop poles at sd = −2 ±
2j. Fix the pole of the compensator at −20 rad/sec and use root
locus techniques to find values of z and K to place the closed–loop
poles at sd .
Problem 4 (placing a zero) Consider a unity feedback control architecture...
Consider a unity feedback control architecture where P(s) =
1/s^2 and C(s) = K * ((s + z)/(s + p)) . It is desired to design
the controller to place the dominant closed-loop poles at sd = −2 ±
2j. Fix the pole of the compensator at −20 rad/sec and use root
locus techniques to find values of z and K to place the closed–loop
poles at sd .
Problem 4 (placing a zero) Consider a unity feedback control architecture...
 Feedback Control of Dynamic System
Please Let me know how to solve this problem
(5) For the following unity-feedback control system, Y(s) R(s)E D(s) (s+ 2) we want to design a controller D(s) D(s)+a) that makes the closed-loop stable for certain positive K values. Design the parameters a and b to satisfy the design condition through the root- locus method
(5) For the following unity-feedback control system, Y(s) R(s)E D(s) (s+ 2) we want to design a controller D(s) D(s)+a)...
Feedback Control of Dynamic System
Please Let me know how to solve this problem
(5) For the following unity-feedback control system, Y(s) R(s)E D(s) (s+ 2) we want to design a controller D(s) D(s)+a) that makes the closed-loop stable for certain positive K values. Design the parameters a and b to satisfy the design condition through the root- locus method
(5) For the following unity-feedback control system, Y(s) R(s)E D(s) (s+ 2) we want to design a controller D(s) D(s)+a)...
 1. Given the unity feedback system, where K(s+1(s 2) 1)(s-4) G(s) do the following: (a) Find the root locus form. (b) Sketch the root locus. (c) Find the value of K such that the system is stable. (d) Find one value of K such that the closed-loop has a settling time less than or equal to 4 second and the percent of overshoot is less than or equal to 10 with the aid of MATLAB
1. Given the unity feedback...
1. Given the unity feedback system, where K(s+1(s 2) 1)(s-4) G(s) do the following: (a) Find the root locus form. (b) Sketch the root locus. (c) Find the value of K such that the system is stable. (d) Find one value of K such that the closed-loop has a settling time less than or equal to 4 second and the percent of overshoot is less than or equal to 10 with the aid of MATLAB
1. Given the unity feedback...
 1. A system with unity feedback is shown below. The feed-forward transfer function is G(s). Sketch the root locus for the variations in the values of pi. R(9)+ 66) 69? Fig. 1: Unity-feedback closed-loop system G(s)= 100 s(s+ p) 2. The following closed-loop systems in Fig. 2 and Fig. 3 are operating with a damping ratio of 0.866 (S =0.866). The system in Fig. 2 doesn't have a PI controller, while the one in Fig. 3 does. Gain Plant R(S)...
1. A system with unity feedback is shown below. The feed-forward transfer function is G(s). Sketch the root locus for the variations in the values of pi. R(9)+ 66) 69? Fig. 1: Unity-feedback closed-loop system G(s)= 100 s(s+ p) 2. The following closed-loop systems in Fig. 2 and Fig. 3 are operating with a damping ratio of 0.866 (S =0.866). The system in Fig. 2 doesn't have a PI controller, while the one in Fig. 3 does. Gain Plant R(S)...
 3) (10 pts) Consider the unity feedback system as shown in Figure 1, where s(s+1)(s+5s+6) (a) For C(s) K, sketch the root locus (b) Based on your root locus in (a), can you find a value of gain K, such that the closed- loop system will have a settling time of 1 second under a step input? Justify your answer.
3) (10 pts) Consider the unity feedback system as shown in Figure 1, where s(s+1)(s+5s+6) (a) For C(s) K, sketch...
3) (10 pts) Consider the unity feedback system as shown in Figure 1, where s(s+1)(s+5s+6) (a) For C(s) K, sketch the root locus (b) Based on your root locus in (a), can you find a value of gain K, such that the closed- loop system will have a settling time of 1 second under a step input? Justify your answer.
3) (10 pts) Consider the unity feedback system as shown in Figure 1, where s(s+1)(s+5s+6) (a) For C(s) K, sketch...
Most questions answered within 3 hours.
-
You have been married to your spouse for 10 years. You have two
small children (ages...
asked 21 minutes ago -
Spiderman makes a leap from one building to
another. He starts on one building that is...
asked 25 minutes ago -
A
symbol is something that stands for something else. What are the
symbols in education?what are...
asked 53 minutes ago -
The charge to the left in the figure above has a
magnitude of 2.90 nC, and...
asked 2 hours ago -
Verify the MIRR is 9.29% given cash flows in years 1 and 2 of
$1,000 each,...
asked 2 hours ago -
Calculate the pH of a 5.7 M solution of aniline (C6H5NH2; Kb =
3.8 x 10^-10)
asked 4 hours ago -
LSL R3, R3, R12
Memory
Address
Orig.
Data
Updated
Data
Register
Orig.
Data
Updated
Data
0x84F0...
asked 4 hours ago -
Air at 100 kPa and density of 1.2 kg/m3 flows upward through a
5-cm diameter inclined...
asked 5 hours ago -
Define the following concepts in your own words: (a) stiffness,
(b) strength, (c) strain,
(d) ductility,...
asked 6 hours ago -
In C++
In this homework, you will be tasked with creating functions to
manipulate strings that...
asked 6 hours ago -
An isolated colony represents a pure culture. one rare occasions
, however , a colony can...
asked 6 hours ago -
*****DO NOT ANSWER THIS QUESTION IF YOU DON'T
KNOW*******Rights and Duties of Auditors; Minimum 4000
words...
asked 7 hours ago