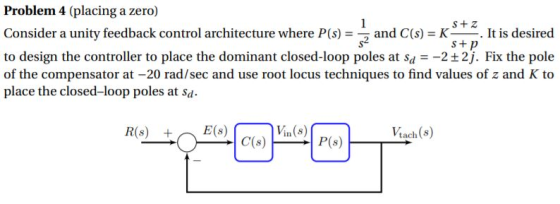
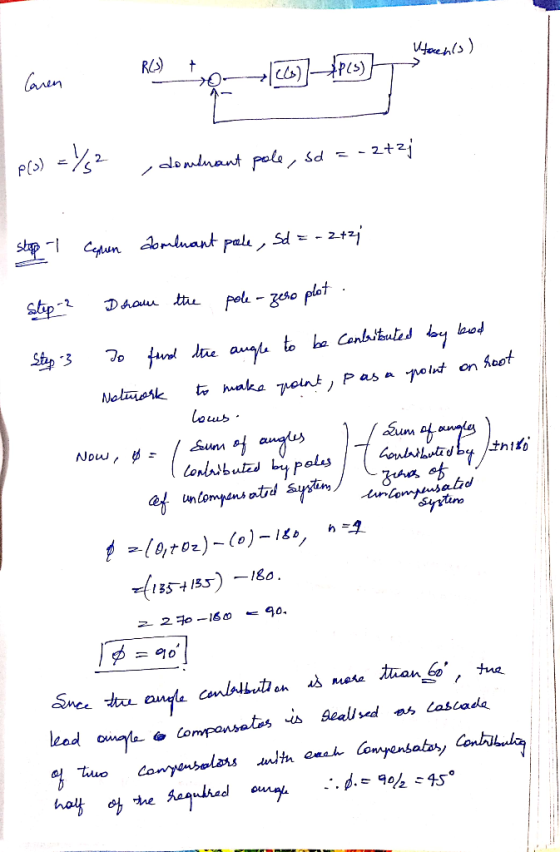
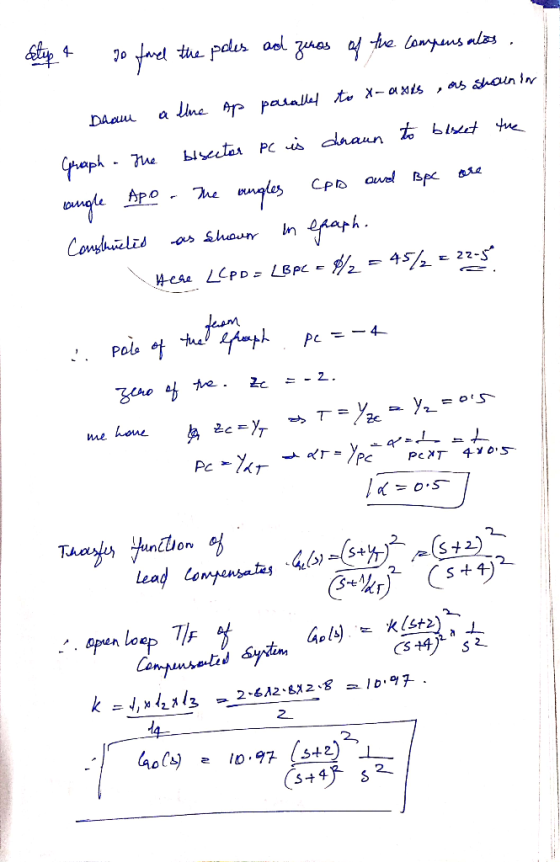
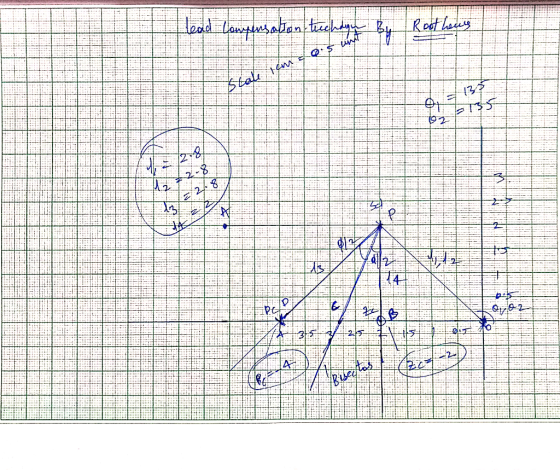
Consider a unity feedback control architecture where P(s) = 1/s^2 and C(s) = K * ((s + z)/(s + p)) . It is desired to design the controller to place the dominant closed-loop poles at sd = −2 ± 2j. Fix the pole of the compensator at −20 rad/sec and use root locus techniques to find values of z and K to place the closed–loop poles at sd .
Homework Answers
Add Answer to:
Consider a unity feedback control architecture where P(s) = 1/s^2 and C(s) = K * ((s + z)/(s + p)...
Problem 3: Consider a unity feedback system with a plant model given by 10(s- 5) and a controller...
 Problem 3: Consider a unity feedback system with a plant model given by 10(s- 5) and a controller given by s + p for K 0 and some real z and p. a) Use the root-locus technique to determine the sign of z and p so that the closed-loop system is stable for all K E (0, K) for some Ku> 0. b) Sketch the possible forms of the root-locus in terms of the pole and zero locations of Ge(s)....
Problem 3: Consider a unity feedback system with a plant model given by 10(s- 5) and a controller given by s + p for K 0 and some real z and p. a) Use the root-locus technique to determine the sign of z and p so that the closed-loop system is stable for all K E (0, K) for some Ku> 0. b) Sketch the possible forms of the root-locus in terms of the pole and zero locations of Ge(s)....
1. Given a unity feedback system with the open-loop transfer function s(0.5s +1) .design a lead c...
 1. Given a unity feedback system with the open-loop transfer function s(0.5s +1) .design a lead compensator ,0 〈 α 〈 1, such that the desired closed-loop poles at -2+2j following steps: J, by completing the (a) Find the angle deficiency from the compensator, (b)Find the zero and poles of the compensator (c) Find constant gain Kc.
1. Given a unity feedback system with the open-loop transfer function s(0.5s +1) .design a lead compensator ,0 〈 α 〈 1, such...
1. Given a unity feedback system with the open-loop transfer function s(0.5s +1) .design a lead compensator ,0 〈 α 〈 1, such that the desired closed-loop poles at -2+2j following steps: J, by completing the (a) Find the angle deficiency from the compensator, (b)Find the zero and poles of the compensator (c) Find constant gain Kc.
1. Given a unity feedback system with the open-loop transfer function s(0.5s +1) .design a lead compensator ,0 〈 α 〈 1, such...
Question 1 (60 points) Consider the following block diagram where G(s)- Controller R(s) G(s) (a) Sketch the root locus assuming a proportional controller is used. [25 points] (b) Design specifica...
 Question 1 (60 points) Consider the following block diagram where G(s)- Controller R(s) G(s) (a) Sketch the root locus assuming a proportional controller is used. [25 points] (b) Design specifications require a closed-loop pole at (-3+j1). Design a lead compensator to make sure the root locus goes through this point. For the design, pick the pole of the compensator at-23 and analytically find its zero. (Hint: Lead compensator transfer function will be Ge (s)$+23 First plot the poles and zeros...
Question 1 (60 points) Consider the following block diagram where G(s)- Controller R(s) G(s) (a) Sketch the root locus assuming a proportional controller is used. [25 points] (b) Design specifications require a closed-loop pole at (-3+j1). Design a lead compensator to make sure the root locus goes through this point. For the design, pick the pole of the compensator at-23 and analytically find its zero. (Hint: Lead compensator transfer function will be Ge (s)$+23 First plot the poles and zeros...
Q. 1 (5 marks) For the system in Fig. (a). Assume proportion control, Gc(s)-K, sketch the root lo...
 pls answer dont just copy other solution or ur catching a
dislike
Q. 1 (5 marks) For the system in Fig. (a). Assume proportion control, Gc(s)-K, sketch the root locus for the closed-loop system (b). Using the angle condition, prove that s12 +j2 is not on the root locus. (c). Design a lead compensator Ge(s) - K such that the dominant closed-loop poles are located at s1--2 2. (d), What are the zero and pole of lead compensator G() (e)....
pls answer dont just copy other solution or ur catching a
dislike
Q. 1 (5 marks) For the system in Fig. (a). Assume proportion control, Gc(s)-K, sketch the root locus for the closed-loop system (b). Using the angle condition, prove that s12 +j2 is not on the root locus. (c). Design a lead compensator Ge(s) - K such that the dominant closed-loop poles are located at s1--2 2. (d), What are the zero and pole of lead compensator G() (e)....
Consider the following controller in a unity feedback configuration: (s + 10) C(s) = k· (s...
 Consider the following controller in a unity feedback configuration: (s + 10) C(s) = k· (s + 5) (a) (by hand) Using an approximation for the plant P(s) a 11 S +2)(s2 + 5s + 25) determine the proper L(s) and sketch an accurate Root Locus plot (b) (by hand) Once you have established the Root Locus, determine the range of k values that guarantees closed-loop stability using the L(jw) method along with the Root Locus plot.
Consider the following controller in a unity feedback configuration: (s + 10) C(s) = k· (s + 5) (a) (by hand) Using an approximation for the plant P(s) a 11 S +2)(s2 + 5s + 25) determine the proper L(s) and sketch an accurate Root Locus plot (b) (by hand) Once you have established the Root Locus, determine the range of k values that guarantees closed-loop stability using the L(jw) method along with the Root Locus plot.
steps R(s) E(s) C(s) G(s) FIGURE P9.1 FIGURE P9.2 9. Consider the unity feedback system shown...
 steps
R(s) E(s) C(s) G(s) FIGURE P9.1 FIGURE P9.2 9. Consider the unity feedback system shown in Figure P9.1 with [Section: 9.3] K G(s) (s+4)3 a. Find the location of the dominant poles to yield a 1.6 second settling time and an overshoot of 25%. b. If a compensator with a zero at -1 is used to achieve the conditions of Part a, what must the angular contribution of the compensator pole be? c. Find the location of the compensator...
steps
R(s) E(s) C(s) G(s) FIGURE P9.1 FIGURE P9.2 9. Consider the unity feedback system shown in Figure P9.1 with [Section: 9.3] K G(s) (s+4)3 a. Find the location of the dominant poles to yield a 1.6 second settling time and an overshoot of 25%. b. If a compensator with a zero at -1 is used to achieve the conditions of Part a, what must the angular contribution of the compensator pole be? c. Find the location of the compensator...
Question# 1 (25 points) For a unity feedback system with open loop transfer function K(s+10)(s+20) (s+30)(s2-20s+2...
 Question# 1 (25 points) For a unity feedback system with open loop transfer function K(s+10)(s+20) (s+30)(s2-20s+200) G(s) = Do the following using Matlab: a) Sketch the root locus. b) Find the range of gain, K that makes the system stable c) Find the value of K that yields a damping ratio of 0.707 for the system's closed-loop dominant poles. d) Obtain Ts, Tp, %OS for the closed loop system in part c). e) Find the value of K that yields...
Question# 1 (25 points) For a unity feedback system with open loop transfer function K(s+10)(s+20) (s+30)(s2-20s+200) G(s) = Do the following using Matlab: a) Sketch the root locus. b) Find the range of gain, K that makes the system stable c) Find the value of K that yields a damping ratio of 0.707 for the system's closed-loop dominant poles. d) Obtain Ts, Tp, %OS for the closed loop system in part c). e) Find the value of K that yields...
1. A system with unity feedback is shown below. The feed-forward transfer function is G(s). Sketch...
 1. A system with unity feedback is shown below. The feed-forward transfer function is G(s). Sketch the root locus for the variations in the values of pi. R(9)+ 66) 69? Fig. 1: Unity-feedback closed-loop system G(s)= 100 s(s+ p) 2. The following closed-loop systems in Fig. 2 and Fig. 3 are operating with a damping ratio of 0.866 (S =0.866). The system in Fig. 2 doesn't have a PI controller, while the one in Fig. 3 does. Gain Plant R(S)...
1. A system with unity feedback is shown below. The feed-forward transfer function is G(s). Sketch the root locus for the variations in the values of pi. R(9)+ 66) 69? Fig. 1: Unity-feedback closed-loop system G(s)= 100 s(s+ p) 2. The following closed-loop systems in Fig. 2 and Fig. 3 are operating with a damping ratio of 0.866 (S =0.866). The system in Fig. 2 doesn't have a PI controller, while the one in Fig. 3 does. Gain Plant R(S)...
1. a. Plot the root loci for the unity-feedback system whose feed-forward transfer function is: K...
 1. a. Plot the root loci for the unity-feedback system whose feed-forward transfer function is: K G(s) = s(s? +48 + 8) If the value of K is set 8, where are the closed loop poles located? Hint: Non-dominant pole is an integer. (5 Points) b. Outline the procedure for design of a lag compensator (on the forward path) that cuts down the rise and settling times to half of the dominant second order system in 1. a. (3 Points)...
1. a. Plot the root loci for the unity-feedback system whose feed-forward transfer function is: K G(s) = s(s? +48 + 8) If the value of K is set 8, where are the closed loop poles located? Hint: Non-dominant pole is an integer. (5 Points) b. Outline the procedure for design of a lag compensator (on the forward path) that cuts down the rise and settling times to half of the dominant second order system in 1. a. (3 Points)...
only b and c please 1 Consider the system whose transfer function is given by: G(S)...
 only b and c please
1 Consider the system whose transfer function is given by: G(S) == (2s +1)(s+3) unction is given by: G(s) - (a) Use the root-locus design methodology to design a lead compensator that will provide a closed-loop damping 5 =0.4 and a natural frequency on =9 rad/sec. The general transfer function for lead compensation is given by D(5)=K (977), p>z, 2=2 (b) Use MATLAB to plot the root locus of the feed-forward transfer function, D(s)*G(s), and...
only b and c please
1 Consider the system whose transfer function is given by: G(S) == (2s +1)(s+3) unction is given by: G(s) - (a) Use the root-locus design methodology to design a lead compensator that will provide a closed-loop damping 5 =0.4 and a natural frequency on =9 rad/sec. The general transfer function for lead compensation is given by D(5)=K (977), p>z, 2=2 (b) Use MATLAB to plot the root locus of the feed-forward transfer function, D(s)*G(s), and...
 Problem 3: Consider a unity feedback system with a plant model given by 10(s- 5) and a controller given by s + p for K 0 and some real z and p. a) Use the root-locus technique to determine the sign of z and p so that the closed-loop system is stable for all K E (0, K) for some Ku> 0. b) Sketch the possible forms of the root-locus in terms of the pole and zero locations of Ge(s)....
Problem 3: Consider a unity feedback system with a plant model given by 10(s- 5) and a controller given by s + p for K 0 and some real z and p. a) Use the root-locus technique to determine the sign of z and p so that the closed-loop system is stable for all K E (0, K) for some Ku> 0. b) Sketch the possible forms of the root-locus in terms of the pole and zero locations of Ge(s)....
 1. Given a unity feedback system with the open-loop transfer function s(0.5s +1) .design a lead compensator ,0 〈 α 〈 1, such that the desired closed-loop poles at -2+2j following steps: J, by completing the (a) Find the angle deficiency from the compensator, (b)Find the zero and poles of the compensator (c) Find constant gain Kc.
1. Given a unity feedback system with the open-loop transfer function s(0.5s +1) .design a lead compensator ,0 〈 α 〈 1, such...
1. Given a unity feedback system with the open-loop transfer function s(0.5s +1) .design a lead compensator ,0 〈 α 〈 1, such that the desired closed-loop poles at -2+2j following steps: J, by completing the (a) Find the angle deficiency from the compensator, (b)Find the zero and poles of the compensator (c) Find constant gain Kc.
1. Given a unity feedback system with the open-loop transfer function s(0.5s +1) .design a lead compensator ,0 〈 α 〈 1, such...
 Question 1 (60 points) Consider the following block diagram where G(s)- Controller R(s) G(s) (a) Sketch the root locus assuming a proportional controller is used. [25 points] (b) Design specifications require a closed-loop pole at (-3+j1). Design a lead compensator to make sure the root locus goes through this point. For the design, pick the pole of the compensator at-23 and analytically find its zero. (Hint: Lead compensator transfer function will be Ge (s)$+23 First plot the poles and zeros...
Question 1 (60 points) Consider the following block diagram where G(s)- Controller R(s) G(s) (a) Sketch the root locus assuming a proportional controller is used. [25 points] (b) Design specifications require a closed-loop pole at (-3+j1). Design a lead compensator to make sure the root locus goes through this point. For the design, pick the pole of the compensator at-23 and analytically find its zero. (Hint: Lead compensator transfer function will be Ge (s)$+23 First plot the poles and zeros...
 pls answer dont just copy other solution or ur catching a
dislike
Q. 1 (5 marks) For the system in Fig. (a). Assume proportion control, Gc(s)-K, sketch the root locus for the closed-loop system (b). Using the angle condition, prove that s12 +j2 is not on the root locus. (c). Design a lead compensator Ge(s) - K such that the dominant closed-loop poles are located at s1--2 2. (d), What are the zero and pole of lead compensator G() (e)....
pls answer dont just copy other solution or ur catching a
dislike
Q. 1 (5 marks) For the system in Fig. (a). Assume proportion control, Gc(s)-K, sketch the root locus for the closed-loop system (b). Using the angle condition, prove that s12 +j2 is not on the root locus. (c). Design a lead compensator Ge(s) - K such that the dominant closed-loop poles are located at s1--2 2. (d), What are the zero and pole of lead compensator G() (e)....
 Consider the following controller in a unity feedback configuration: (s + 10) C(s) = k· (s + 5) (a) (by hand) Using an approximation for the plant P(s) a 11 S +2)(s2 + 5s + 25) determine the proper L(s) and sketch an accurate Root Locus plot (b) (by hand) Once you have established the Root Locus, determine the range of k values that guarantees closed-loop stability using the L(jw) method along with the Root Locus plot.
Consider the following controller in a unity feedback configuration: (s + 10) C(s) = k· (s + 5) (a) (by hand) Using an approximation for the plant P(s) a 11 S +2)(s2 + 5s + 25) determine the proper L(s) and sketch an accurate Root Locus plot (b) (by hand) Once you have established the Root Locus, determine the range of k values that guarantees closed-loop stability using the L(jw) method along with the Root Locus plot.
 steps
R(s) E(s) C(s) G(s) FIGURE P9.1 FIGURE P9.2 9. Consider the unity feedback system shown in Figure P9.1 with [Section: 9.3] K G(s) (s+4)3 a. Find the location of the dominant poles to yield a 1.6 second settling time and an overshoot of 25%. b. If a compensator with a zero at -1 is used to achieve the conditions of Part a, what must the angular contribution of the compensator pole be? c. Find the location of the compensator...
steps
R(s) E(s) C(s) G(s) FIGURE P9.1 FIGURE P9.2 9. Consider the unity feedback system shown in Figure P9.1 with [Section: 9.3] K G(s) (s+4)3 a. Find the location of the dominant poles to yield a 1.6 second settling time and an overshoot of 25%. b. If a compensator with a zero at -1 is used to achieve the conditions of Part a, what must the angular contribution of the compensator pole be? c. Find the location of the compensator...
 Question# 1 (25 points) For a unity feedback system with open loop transfer function K(s+10)(s+20) (s+30)(s2-20s+200) G(s) = Do the following using Matlab: a) Sketch the root locus. b) Find the range of gain, K that makes the system stable c) Find the value of K that yields a damping ratio of 0.707 for the system's closed-loop dominant poles. d) Obtain Ts, Tp, %OS for the closed loop system in part c). e) Find the value of K that yields...
Question# 1 (25 points) For a unity feedback system with open loop transfer function K(s+10)(s+20) (s+30)(s2-20s+200) G(s) = Do the following using Matlab: a) Sketch the root locus. b) Find the range of gain, K that makes the system stable c) Find the value of K that yields a damping ratio of 0.707 for the system's closed-loop dominant poles. d) Obtain Ts, Tp, %OS for the closed loop system in part c). e) Find the value of K that yields...
 1. A system with unity feedback is shown below. The feed-forward transfer function is G(s). Sketch the root locus for the variations in the values of pi. R(9)+ 66) 69? Fig. 1: Unity-feedback closed-loop system G(s)= 100 s(s+ p) 2. The following closed-loop systems in Fig. 2 and Fig. 3 are operating with a damping ratio of 0.866 (S =0.866). The system in Fig. 2 doesn't have a PI controller, while the one in Fig. 3 does. Gain Plant R(S)...
1. A system with unity feedback is shown below. The feed-forward transfer function is G(s). Sketch the root locus for the variations in the values of pi. R(9)+ 66) 69? Fig. 1: Unity-feedback closed-loop system G(s)= 100 s(s+ p) 2. The following closed-loop systems in Fig. 2 and Fig. 3 are operating with a damping ratio of 0.866 (S =0.866). The system in Fig. 2 doesn't have a PI controller, while the one in Fig. 3 does. Gain Plant R(S)...
 1. a. Plot the root loci for the unity-feedback system whose feed-forward transfer function is: K G(s) = s(s? +48 + 8) If the value of K is set 8, where are the closed loop poles located? Hint: Non-dominant pole is an integer. (5 Points) b. Outline the procedure for design of a lag compensator (on the forward path) that cuts down the rise and settling times to half of the dominant second order system in 1. a. (3 Points)...
1. a. Plot the root loci for the unity-feedback system whose feed-forward transfer function is: K G(s) = s(s? +48 + 8) If the value of K is set 8, where are the closed loop poles located? Hint: Non-dominant pole is an integer. (5 Points) b. Outline the procedure for design of a lag compensator (on the forward path) that cuts down the rise and settling times to half of the dominant second order system in 1. a. (3 Points)...
 only b and c please
1 Consider the system whose transfer function is given by: G(S) == (2s +1)(s+3) unction is given by: G(s) - (a) Use the root-locus design methodology to design a lead compensator that will provide a closed-loop damping 5 =0.4 and a natural frequency on =9 rad/sec. The general transfer function for lead compensation is given by D(5)=K (977), p>z, 2=2 (b) Use MATLAB to plot the root locus of the feed-forward transfer function, D(s)*G(s), and...
only b and c please
1 Consider the system whose transfer function is given by: G(S) == (2s +1)(s+3) unction is given by: G(s) - (a) Use the root-locus design methodology to design a lead compensator that will provide a closed-loop damping 5 =0.4 and a natural frequency on =9 rad/sec. The general transfer function for lead compensation is given by D(5)=K (977), p>z, 2=2 (b) Use MATLAB to plot the root locus of the feed-forward transfer function, D(s)*G(s), and...
Most questions answered within 3 hours.
-
Write a program to solve the Josephus problem, with the following
modification:
Sample Input:
./a.out n...
asked 1 hour ago -
At the start of a CD it is spinning at a rate of 525 rpm
(revolutions...
asked 1 hour ago -
4. Without doing any calculations, predict whether the observed
∆T would increase, decrease or remain the...
asked 3 hours ago -
Based on the range, which of the following sets of scores has
the greatest variability? 3,...
asked 4 hours ago -
Ripples in a pond travel at a velocity of 3 m/s with one peak
passing a...
asked 4 hours ago -
A man stands on the roof of a building of height 13.0 mm and
throws a...
asked 4 hours ago -
The extent to which assets are financed by borrowed funds and
other liabilities is indicated by:...
asked 5 hours ago -
Explain in detail
Germany is the fifth largest economy
explain what goods and services Germany specializes...
asked 5 hours ago -
The density of platinum is 21.45 g/mL. If a cube of platinum
with a mass of...
asked 5 hours ago -
Accounts Receivable
Sales
A/R Posting
Extended Sales Invoice
Packing Slip
Compare invoice to packing slip 2...
asked 5 hours ago -
Michaella, age 23, is a full-time law student and is claimed by
her parents as a...
asked 5 hours ago -
Why are polymers not typically casted into products?
asked 5 hours ago