
Homework Answers

Add Answer to:
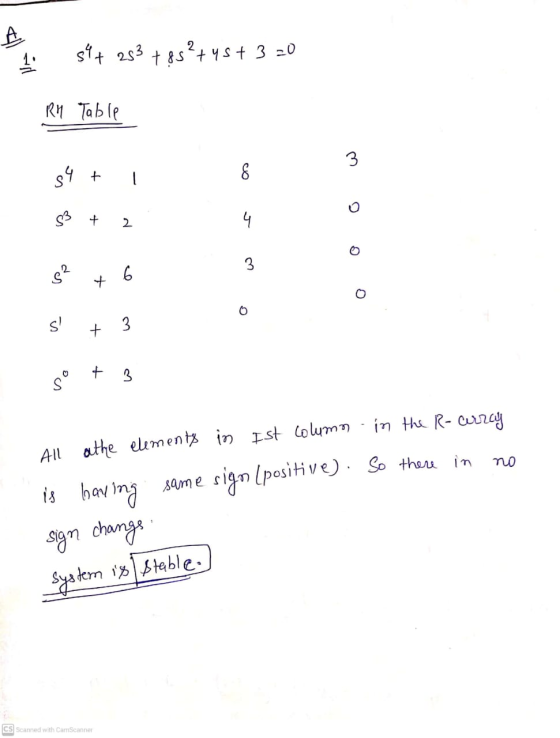
A. Consider the characteristic equations below, comment on their system stability? 1. D(s)=s4 +253 +852 +...
Question 8: Consider the closed-loop magnetic levitation system shown in Figure below. With Ko = 1,...
 Question 8: Consider the closed-loop magnetic levitation system shown in Figure below. With Ko = 1, determine the conditions on the system parameters (a, K, Z, p) to guarantee closed-loop system stability. Question 9: Considering following transfer function, find the range of K for which system will be stable K(s +2) T(S) 54 +353-352 + (K + 3) + (2K-4)
Question 8: Consider the closed-loop magnetic levitation system shown in Figure below. With Ko = 1, determine the conditions on the system parameters (a, K, Z, p) to guarantee closed-loop system stability. Question 9: Considering following transfer function, find the range of K for which system will be stable K(s +2) T(S) 54 +353-352 + (K + 3) + (2K-4)
control systems 1) Using Routh Hurwitz Stability Criteria, determine whether the following system of equation is...
 control systems
1) Using Routh Hurwitz Stability Criteria, determine whether the following system of equation is stable or not. a) S4+253+3S2+45+5=0 2) Using the Routh Hurwitz stability criterion, determine the range of K for stability of the following characteristic equation. a) s4+2s8+(4+K)s2+9s+25=0 3)Sketch the root-locus of the following systems a) G(s)H(s) = s(s+1)(s+2) b) G(s)H(s) = 52(8+3.6) K(5+1)
control systems
1) Using Routh Hurwitz Stability Criteria, determine whether the following system of equation is stable or not. a) S4+253+3S2+45+5=0 2) Using the Routh Hurwitz stability criterion, determine the range of K for stability of the following characteristic equation. a) s4+2s8+(4+K)s2+9s+25=0 3)Sketch the root-locus of the following systems a) G(s)H(s) = s(s+1)(s+2) b) G(s)H(s) = 52(8+3.6) K(5+1)
please do part D only the matlab. thank you 3. Consider the following system s(s2 +4s...
 please do part D only the matlab. thank you
3. Consider the following system s(s2 +4s 13) (a) Draw the root locus. b) Use Routh's criterion to find the range of the gain K for which the closed-loop system is stable. (continued on next page) (c) The range of K for which the system is stable can also be obtained by finding a point of the root locus that crosses the Imaginary axis. When you have an Im-axis crossing, the...
please do part D only the matlab. thank you
3. Consider the following system s(s2 +4s 13) (a) Draw the root locus. b) Use Routh's criterion to find the range of the gain K for which the closed-loop system is stable. (continued on next page) (c) The range of K for which the system is stable can also be obtained by finding a point of the root locus that crosses the Imaginary axis. When you have an Im-axis crossing, the...
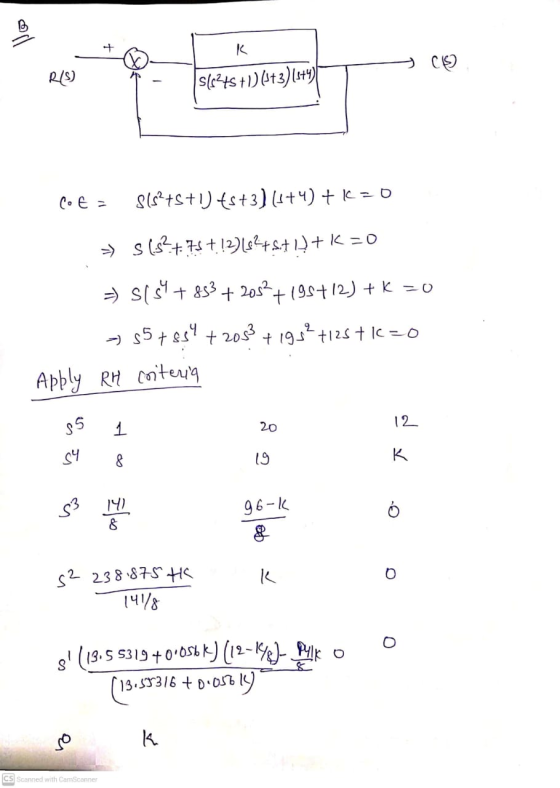
6. Consider the following control system. s(s1)(s +3) (a) Derive the characteristic equation of the (closed-loop)...
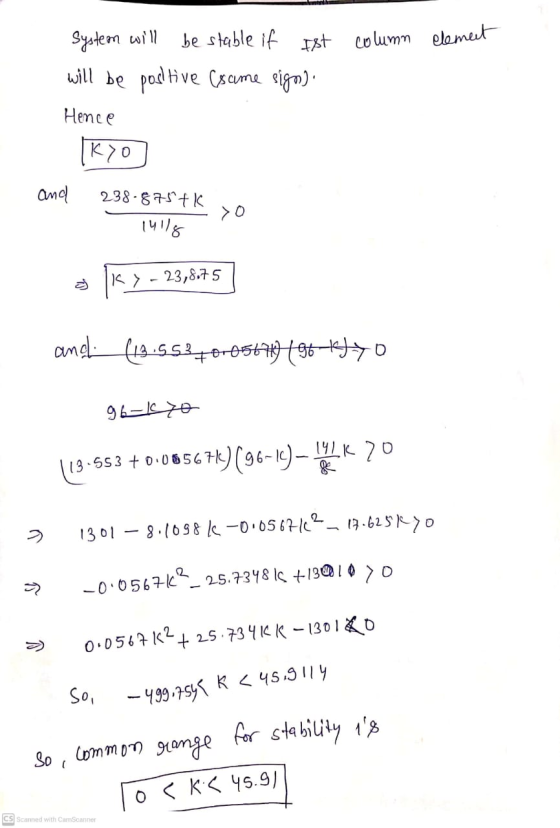
 6. Consider the following control system. s(s1)(s +3) (a) Derive the characteristic equation of the (closed-loop) system. (b) Determine the range of K for stability using Routh's stability criterion.
6. Consider the following control system. s(s1)(s +3) (a) Derive the characteristic equation of the (closed-loop) system. (b) Determine the range of K for stability using Routh's stability criterion.
. S3 G(s) H (s) = K s2 + s-4 For the closed loop system use a Nyquist plot to, a. Classify the st...
 . S3 G(s) H (s) = K s2 + s-4 For the closed loop system use a Nyquist plot to, a. Classify the stability of the system. b. Find the range of K for a stable system. (analytic by hand) c. Find the value of K for a marginally stable system. (analytic by hand)
. S3 G(s) H (s) = K s2 + s-4 For the closed loop system use a Nyquist plot to, a. Classify the stability of the...
. S3 G(s) H (s) = K s2 + s-4 For the closed loop system use a Nyquist plot to, a. Classify the stability of the system. b. Find the range of K for a stable system. (analytic by hand) c. Find the value of K for a marginally stable system. (analytic by hand)
. S3 G(s) H (s) = K s2 + s-4 For the closed loop system use a Nyquist plot to, a. Classify the stability of the...
For the system of Figure P1: 1. a) Find the range of K for stability. b)...
 For the system of Figure P1: 1. a) Find the range of K for stability. b) Find the value of K for marginal stability. c) Find the actual location of the closed-loop poles when the system is marginally stable. Cis) s(s+i)(s+2)6+5)
For the system of Figure P1: 1. a) Find the range of K for stability. b) Find the value of K for marginal stability. c) Find the actual location of the closed-loop poles when the system is marginally stable. Cis) s(s+i)(s+2)6+5)
Question 2 System Stability in the s-Domain and in the Frequency Domain: Bode Plots, Root Locus...
 Question 2 System Stability in the s-Domain and in the Frequency Domain: Bode Plots, Root Locus Plots and Routh- Hurwitz Criterion ofStability A unit feedback control system is to be stabilized using a Proportional Controller, as shown in Figure Q2.1. Proportional Controller Process The process transfer function is described as follows: Y(s) G(s) s2 +4s 100 s3 +4s2 5s 2 Figure Q2.1 Your task is to investigate the stability of the closed loop system using s-domain analysis by finding: a)...
Question 2 System Stability in the s-Domain and in the Frequency Domain: Bode Plots, Root Locus Plots and Routh- Hurwitz Criterion ofStability A unit feedback control system is to be stabilized using a Proportional Controller, as shown in Figure Q2.1. Proportional Controller Process The process transfer function is described as follows: Y(s) G(s) s2 +4s 100 s3 +4s2 5s 2 Figure Q2.1 Your task is to investigate the stability of the closed loop system using s-domain analysis by finding: a)...
Please sketch the Root Loci of the system below and show intermediate steps. Thanks! Problem 2....
 Please sketch the Root Loci of the system below and show
intermediate steps. Thanks!
Problem 2. [5 points] Utilizing the Routh's stability criterion, determine the range of K for stability for the given characteristic equation s+2s3 (4+K)s2 +9s25 0, and verify the analysis by selecting K values for stable and unstable regions, respectively, and by observing time responses with Simulink simulations. Note that the associated open-loop transfer function can be derived such that s +2s3 +4s+925+Ks2-0+K G() 0 where G(5...
Please sketch the Root Loci of the system below and show
intermediate steps. Thanks!
Problem 2. [5 points] Utilizing the Routh's stability criterion, determine the range of K for stability for the given characteristic equation s+2s3 (4+K)s2 +9s25 0, and verify the analysis by selecting K values for stable and unstable regions, respectively, and by observing time responses with Simulink simulations. Note that the associated open-loop transfer function can be derived such that s +2s3 +4s+925+Ks2-0+K G() 0 where G(5...
Consider the following control system: R + Let G(s) s +23-3 and H(s) K where K is some positive c...
 Consider the following control system: R + Let G(s) s +23-3 and H(s) K where K is some positive constant. The transfer function H(s) can be considered a proportional feedback controller. (a) Examine the behavior of the system for different values of K. Try the values K 2, 4, 8. In each case, plot the pole-zero map of the closed-loop system and examine the step response. Comment on the stability of the system. Find the value of K for which...
Consider the following control system: R + Let G(s) s +23-3 and H(s) K where K is some positive constant. The transfer function H(s) can be considered a proportional feedback controller. (a) Examine the behavior of the system for different values of K. Try the values K 2, 4, 8. In each case, plot the pole-zero map of the closed-loop system and examine the step response. Comment on the stability of the system. Find the value of K for which...
3. For the feedback control system shown in Figure Q3 below, the forward-path transfer function given...
 3. For the feedback control system shown in Figure Q3 below, the forward-path transfer function given by G(s) and the sensor transfer function is given by H(s). R(s) C(s) G(s) H(s) Figure Q3 It is known that G(s) -- K(+20) S(+5) H(s) = and K is the proportional gain. (S+10) i. Determine the closed-loop transfer function and hence the characteristic equation of the system. [6 marks] ii. Using the Routh-Hurwitz criterion, determine the stability of the closed-loop system. Determine the...
3. For the feedback control system shown in Figure Q3 below, the forward-path transfer function given by G(s) and the sensor transfer function is given by H(s). R(s) C(s) G(s) H(s) Figure Q3 It is known that G(s) -- K(+20) S(+5) H(s) = and K is the proportional gain. (S+10) i. Determine the closed-loop transfer function and hence the characteristic equation of the system. [6 marks] ii. Using the Routh-Hurwitz criterion, determine the stability of the closed-loop system. Determine the...
 Question 8: Consider the closed-loop magnetic levitation system shown in Figure below. With Ko = 1, determine the conditions on the system parameters (a, K, Z, p) to guarantee closed-loop system stability. Question 9: Considering following transfer function, find the range of K for which system will be stable K(s +2) T(S) 54 +353-352 + (K + 3) + (2K-4)
Question 8: Consider the closed-loop magnetic levitation system shown in Figure below. With Ko = 1, determine the conditions on the system parameters (a, K, Z, p) to guarantee closed-loop system stability. Question 9: Considering following transfer function, find the range of K for which system will be stable K(s +2) T(S) 54 +353-352 + (K + 3) + (2K-4)
 control systems
1) Using Routh Hurwitz Stability Criteria, determine whether the following system of equation is stable or not. a) S4+253+3S2+45+5=0 2) Using the Routh Hurwitz stability criterion, determine the range of K for stability of the following characteristic equation. a) s4+2s8+(4+K)s2+9s+25=0 3)Sketch the root-locus of the following systems a) G(s)H(s) = s(s+1)(s+2) b) G(s)H(s) = 52(8+3.6) K(5+1)
control systems
1) Using Routh Hurwitz Stability Criteria, determine whether the following system of equation is stable or not. a) S4+253+3S2+45+5=0 2) Using the Routh Hurwitz stability criterion, determine the range of K for stability of the following characteristic equation. a) s4+2s8+(4+K)s2+9s+25=0 3)Sketch the root-locus of the following systems a) G(s)H(s) = s(s+1)(s+2) b) G(s)H(s) = 52(8+3.6) K(5+1)
 please do part D only the matlab. thank you
3. Consider the following system s(s2 +4s 13) (a) Draw the root locus. b) Use Routh's criterion to find the range of the gain K for which the closed-loop system is stable. (continued on next page) (c) The range of K for which the system is stable can also be obtained by finding a point of the root locus that crosses the Imaginary axis. When you have an Im-axis crossing, the...
please do part D only the matlab. thank you
3. Consider the following system s(s2 +4s 13) (a) Draw the root locus. b) Use Routh's criterion to find the range of the gain K for which the closed-loop system is stable. (continued on next page) (c) The range of K for which the system is stable can also be obtained by finding a point of the root locus that crosses the Imaginary axis. When you have an Im-axis crossing, the...
 6. Consider the following control system. s(s1)(s +3) (a) Derive the characteristic equation of the (closed-loop) system. (b) Determine the range of K for stability using Routh's stability criterion.
6. Consider the following control system. s(s1)(s +3) (a) Derive the characteristic equation of the (closed-loop) system. (b) Determine the range of K for stability using Routh's stability criterion.
 . S3 G(s) H (s) = K s2 + s-4 For the closed loop system use a Nyquist plot to, a. Classify the stability of the system. b. Find the range of K for a stable system. (analytic by hand) c. Find the value of K for a marginally stable system. (analytic by hand)
. S3 G(s) H (s) = K s2 + s-4 For the closed loop system use a Nyquist plot to, a. Classify the stability of the...
. S3 G(s) H (s) = K s2 + s-4 For the closed loop system use a Nyquist plot to, a. Classify the stability of the system. b. Find the range of K for a stable system. (analytic by hand) c. Find the value of K for a marginally stable system. (analytic by hand)
. S3 G(s) H (s) = K s2 + s-4 For the closed loop system use a Nyquist plot to, a. Classify the stability of the...
 For the system of Figure P1: 1. a) Find the range of K for stability. b) Find the value of K for marginal stability. c) Find the actual location of the closed-loop poles when the system is marginally stable. Cis) s(s+i)(s+2)6+5)
For the system of Figure P1: 1. a) Find the range of K for stability. b) Find the value of K for marginal stability. c) Find the actual location of the closed-loop poles when the system is marginally stable. Cis) s(s+i)(s+2)6+5)
 Question 2 System Stability in the s-Domain and in the Frequency Domain: Bode Plots, Root Locus Plots and Routh- Hurwitz Criterion ofStability A unit feedback control system is to be stabilized using a Proportional Controller, as shown in Figure Q2.1. Proportional Controller Process The process transfer function is described as follows: Y(s) G(s) s2 +4s 100 s3 +4s2 5s 2 Figure Q2.1 Your task is to investigate the stability of the closed loop system using s-domain analysis by finding: a)...
Question 2 System Stability in the s-Domain and in the Frequency Domain: Bode Plots, Root Locus Plots and Routh- Hurwitz Criterion ofStability A unit feedback control system is to be stabilized using a Proportional Controller, as shown in Figure Q2.1. Proportional Controller Process The process transfer function is described as follows: Y(s) G(s) s2 +4s 100 s3 +4s2 5s 2 Figure Q2.1 Your task is to investigate the stability of the closed loop system using s-domain analysis by finding: a)...
 Please sketch the Root Loci of the system below and show
intermediate steps. Thanks!
Problem 2. [5 points] Utilizing the Routh's stability criterion, determine the range of K for stability for the given characteristic equation s+2s3 (4+K)s2 +9s25 0, and verify the analysis by selecting K values for stable and unstable regions, respectively, and by observing time responses with Simulink simulations. Note that the associated open-loop transfer function can be derived such that s +2s3 +4s+925+Ks2-0+K G() 0 where G(5...
Please sketch the Root Loci of the system below and show
intermediate steps. Thanks!
Problem 2. [5 points] Utilizing the Routh's stability criterion, determine the range of K for stability for the given characteristic equation s+2s3 (4+K)s2 +9s25 0, and verify the analysis by selecting K values for stable and unstable regions, respectively, and by observing time responses with Simulink simulations. Note that the associated open-loop transfer function can be derived such that s +2s3 +4s+925+Ks2-0+K G() 0 where G(5...
 Consider the following control system: R + Let G(s) s +23-3 and H(s) K where K is some positive constant. The transfer function H(s) can be considered a proportional feedback controller. (a) Examine the behavior of the system for different values of K. Try the values K 2, 4, 8. In each case, plot the pole-zero map of the closed-loop system and examine the step response. Comment on the stability of the system. Find the value of K for which...
Consider the following control system: R + Let G(s) s +23-3 and H(s) K where K is some positive constant. The transfer function H(s) can be considered a proportional feedback controller. (a) Examine the behavior of the system for different values of K. Try the values K 2, 4, 8. In each case, plot the pole-zero map of the closed-loop system and examine the step response. Comment on the stability of the system. Find the value of K for which...
 3. For the feedback control system shown in Figure Q3 below, the forward-path transfer function given by G(s) and the sensor transfer function is given by H(s). R(s) C(s) G(s) H(s) Figure Q3 It is known that G(s) -- K(+20) S(+5) H(s) = and K is the proportional gain. (S+10) i. Determine the closed-loop transfer function and hence the characteristic equation of the system. [6 marks] ii. Using the Routh-Hurwitz criterion, determine the stability of the closed-loop system. Determine the...
3. For the feedback control system shown in Figure Q3 below, the forward-path transfer function given by G(s) and the sensor transfer function is given by H(s). R(s) C(s) G(s) H(s) Figure Q3 It is known that G(s) -- K(+20) S(+5) H(s) = and K is the proportional gain. (S+10) i. Determine the closed-loop transfer function and hence the characteristic equation of the system. [6 marks] ii. Using the Routh-Hurwitz criterion, determine the stability of the closed-loop system. Determine the...
Most questions answered within 3 hours.
-
A cohort study is conducted to determine whether smoking is
associated with an increased risk of...
asked 2 minutes from now -
Create the pseudo-code/flowchart for an application class named
Monogram. Its main() method inputs three variables that...
asked 1 minute from now -
How many liters of water are required to dissolve 1.00 g of
silver chromate? Express your...
asked 1 minute ago -
Hot: T_inlet = 80, T_out = 65
Cold: T_inlet = 10, T_out = 25
Explain in...
asked 1 minute ago -
Two protons fly in different directions and collide. They both
have a total energy of 1.5...
asked 10 minutes ago -
What is the oxidation number of each atom in sodium phosphate,
Na3PO4?
>>> SHOW YOUR WORK...
asked 17 minutes ago -
D company purchased goods with a list price of $60000, subject
to trade discounts of 20%...
asked 19 minutes ago -
Transposable elements make up more than 40% of the human genome
and are inserted more-or-less randomly...
asked 30 minutes ago -
Can I get some samples of the following:
1) Write four sentences in first person, singular....
asked 35 minutes ago -
Described how search engines work. Be sure to describe in detail
.
asked 35 minutes ago -
The position of a particle as a function of time is given by
x=(2.0m/s)t+(−3.0m/s3)t^3. Part A...
asked 41 minutes ago -
If you wanted to insert a gene into a plasmid, why
would it be helpful to...
asked 40 minutes ago