
Homework Answers








Add Answer to:
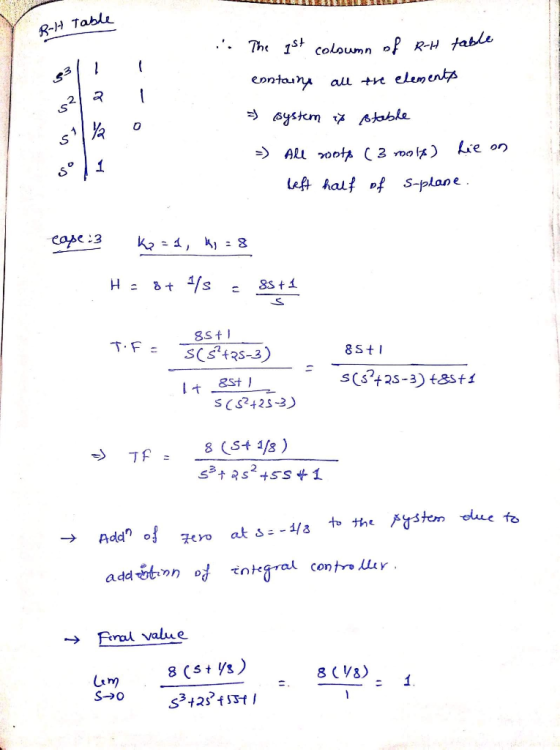
Consider the following control system: R + Let G(s) s +23-3 and H(s) K where K is some positive c...
Consider a unity-feedback control system with a PI controller Gpr(s) and a plant G(s) in cascade. In particular, the plant transfer function is given as 2. G(s) = s+4, and the PI controller trans...
 Consider a unity-feedback control system with a PI controller Gpr(s) and a plant G(s) in cascade. In particular, the plant transfer function is given as 2. G(s) = s+4, and the PI controller transfer function is of the forrm KI p and Ki are the proportional and integral controller gains, respectively where K Design numerical values for Kp and Ki such that the closed-loop control system has a step- response settling time T, 0.5 seconds with a damping ratio of...
Consider a unity-feedback control system with a PI controller Gpr(s) and a plant G(s) in cascade. In particular, the plant transfer function is given as 2. G(s) = s+4, and the PI controller transfer function is of the forrm KI p and Ki are the proportional and integral controller gains, respectively where K Design numerical values for Kp and Ki such that the closed-loop control system has a step- response settling time T, 0.5 seconds with a damping ratio of...
Question 6 The open-loop transfer function G(s) of a control system is given as G(8)- s(s+2)(s +5...
 Question 6 The open-loop transfer function G(s) of a control system is given as G(8)- s(s+2)(s +5) A proportional controller is used to control the system as shown in Figure 6 below: Y(s) R(s) + G(s) Figure 6: A control system with a proportional controller a) Assume Hp(s) is a proportional controller with the transfer function H,(s) kp. Determine, using the Routh-Hurwitz Stability Criterion, the value of kp for which the closed-loop system in Figure 6 is marginally stable. (6...
Question 6 The open-loop transfer function G(s) of a control system is given as G(8)- s(s+2)(s +5) A proportional controller is used to control the system as shown in Figure 6 below: Y(s) R(s) + G(s) Figure 6: A control system with a proportional controller a) Assume Hp(s) is a proportional controller with the transfer function H,(s) kp. Determine, using the Routh-Hurwitz Stability Criterion, the value of kp for which the closed-loop system in Figure 6 is marginally stable. (6...
Consider the unity feedback system is given below R(S) C(s) G() with transfer function: G(s) =...
 Consider the unity feedback system is given below R(S) C(s) G() with transfer function: G(s) = K s(s + 1)(s + 2)(8 + 6) a) Find the value of the gain K, that will make the system stable. b) Find the value of the gain K, that will make the system marginally stable. c) Find the actual location of the closed-loop poles when the system is marginally stable.
Consider the unity feedback system is given below R(S) C(s) G() with transfer function: G(s) = K s(s + 1)(s + 2)(8 + 6) a) Find the value of the gain K, that will make the system stable. b) Find the value of the gain K, that will make the system marginally stable. c) Find the actual location of the closed-loop poles when the system is marginally stable.
Problem S Consider the control system shown in Figure 4 let Cand G,() -K and Gc...
 Problem S Consider the control system shown in Figure 4 let Cand G,() -K and Gc (s) K (s-1) (s+2) (s+3) (a) Determine the open-loop system (i.e., G (s)) poles and zeros. (b) Determine the number of asymptotes and the angles of asymptotes. (c) Determine the break-in/break-out points (if any) (d) Sketch the root locus (e) Determine the value of K (if any) for which the system is marginally stable
Problem S Consider the control system shown in Figure 4 let Cand G,() -K and Gc (s) K (s-1) (s+2) (s+3) (a) Determine the open-loop system (i.e., G (s)) poles and zeros. (b) Determine the number of asymptotes and the angles of asymptotes. (c) Determine the break-in/break-out points (if any) (d) Sketch the root locus (e) Determine the value of K (if any) for which the system is marginally stable
Problem 3: (30) Consider the following systen where K is a proportional gain (K>0). s-2 (a) Sketch the root locus us...
 Problem 3: (30) Consider the following systen where K is a proportional gain (K>0). s-2 (a) Sketch the root locus using the below procedures. (1) find poles and zeros and locate on complex domain (2) find number of branches (3) find asymptotes including centroid and angles of asymptotes (4) intersection at imaginary axis (5) find the angle of departure (6) draw the root migration (b) Find the range of K for which the feedback system is asymptotically stable.
Problem 3:...
Problem 3: (30) Consider the following systen where K is a proportional gain (K>0). s-2 (a) Sketch the root locus using the below procedures. (1) find poles and zeros and locate on complex domain (2) find number of branches (3) find asymptotes including centroid and angles of asymptotes (4) intersection at imaginary axis (5) find the angle of departure (6) draw the root migration (b) Find the range of K for which the feedback system is asymptotically stable.
Problem 3:...
Question 2 System Stability in the s-Domain and in the Frequency Domain: Bode Plots, Root Locus...
 Question 2 System Stability in the s-Domain and in the Frequency Domain: Bode Plots, Root Locus Plots and Routh- Hurwitz Criterion ofStability A unit feedback control system is to be stabilized using a Proportional Controller, as shown in Figure Q2.1. Proportional Controller Process The process transfer function is described as follows: Y(s) G(s) s2 +4s 100 s3 +4s2 5s 2 Figure Q2.1 Your task is to investigate the stability of the closed loop system using s-domain analysis by finding: a)...
Question 2 System Stability in the s-Domain and in the Frequency Domain: Bode Plots, Root Locus Plots and Routh- Hurwitz Criterion ofStability A unit feedback control system is to be stabilized using a Proportional Controller, as shown in Figure Q2.1. Proportional Controller Process The process transfer function is described as follows: Y(s) G(s) s2 +4s 100 s3 +4s2 5s 2 Figure Q2.1 Your task is to investigate the stability of the closed loop system using s-domain analysis by finding: a)...
1. Consider the following feedback control system Controller Process 1 G(s) R(s) Y(s) $2+5s+6 Below are...
 1. Consider the following feedback control system Controller Process 1 G(s) R(s) Y(s) $2+5s+6 Below are two potential controllers for this system: 1) Ge(s) K (Proportional controller) 2) Ge(s) K(1 1/s) (Proportional-integral controller) The design specifications are t 3.2s and P. 0. 10% for a unit step input (a) Determine the area on the S-plane where the dominant closed loop poles must be located such that the design requirements are satisfied. (b) Sketch the root locus with each of the...
1. Consider the following feedback control system Controller Process 1 G(s) R(s) Y(s) $2+5s+6 Below are two potential controllers for this system: 1) Ge(s) K (Proportional controller) 2) Ge(s) K(1 1/s) (Proportional-integral controller) The design specifications are t 3.2s and P. 0. 10% for a unit step input (a) Determine the area on the S-plane where the dominant closed loop poles must be located such that the design requirements are satisfied. (b) Sketch the root locus with each of the...
Problem 3. (15 points) Consider the feedback system in Figure 3, where G(s)1 (s -1)3 Ge(s)...
 Problem 3. (15 points) Consider the feedback system in Figure 3, where G(s)1 (s -1)3 Ge(s) G(s) Figure 3: Problem 3 1. Let the compensator be given by a pure gain, ie, Ge(s)-K, K 0 (a) Draw the root locus of the compensated system (b) Is it possible to stabilize the systems by selecting K appropriately? If so, find the range for K such that the closed-loop system is BIBO stable. If not, explain. 2. This time, let the compensator...
Problem 3. (15 points) Consider the feedback system in Figure 3, where G(s)1 (s -1)3 Ge(s) G(s) Figure 3: Problem 3 1. Let the compensator be given by a pure gain, ie, Ge(s)-K, K 0 (a) Draw the root locus of the compensated system (b) Is it possible to stabilize the systems by selecting K appropriately? If so, find the range for K such that the closed-loop system is BIBO stable. If not, explain. 2. This time, let the compensator...
R(S) + C(s) K $++383+10s2+30s+150 1 A feedback system is described on the figure above. a....
 R(S) + C(s) K $++383+10s2+30s+150 1 A feedback system is described on the figure above. a. If K=450 find the number of closed-loop poles located on the RHS, LHS and on the jw-axis. b. Find the value of the gain K, which will produce undamped system step response (critical gain). Find the respective oscillating frequency. c. For which values of K the system will be (i) stable, (ii) not stable.
R(S) + C(s) K $++383+10s2+30s+150 1 A feedback system is described on the figure above. a. If K=450 find the number of closed-loop poles located on the RHS, LHS and on the jw-axis. b. Find the value of the gain K, which will produce undamped system step response (critical gain). Find the respective oscillating frequency. c. For which values of K the system will be (i) stable, (ii) not stable.
Feedback Control of Dynamic System Please Let me know how to solve this problem (5) For the following unity-feedback control system, Y(s) R(s)E D(s) (s+ 2) we want to design a controller D(s) D(s)+a)...
 Feedback Control of Dynamic System
Please Let me know how to solve this problem
(5) For the following unity-feedback control system, Y(s) R(s)E D(s) (s+ 2) we want to design a controller D(s) D(s)+a) that makes the closed-loop stable for certain positive K values. Design the parameters a and b to satisfy the design condition through the root- locus method
(5) For the following unity-feedback control system, Y(s) R(s)E D(s) (s+ 2) we want to design a controller D(s) D(s)+a)...
Feedback Control of Dynamic System
Please Let me know how to solve this problem
(5) For the following unity-feedback control system, Y(s) R(s)E D(s) (s+ 2) we want to design a controller D(s) D(s)+a) that makes the closed-loop stable for certain positive K values. Design the parameters a and b to satisfy the design condition through the root- locus method
(5) For the following unity-feedback control system, Y(s) R(s)E D(s) (s+ 2) we want to design a controller D(s) D(s)+a)...
 Consider a unity-feedback control system with a PI controller Gpr(s) and a plant G(s) in cascade. In particular, the plant transfer function is given as 2. G(s) = s+4, and the PI controller transfer function is of the forrm KI p and Ki are the proportional and integral controller gains, respectively where K Design numerical values for Kp and Ki such that the closed-loop control system has a step- response settling time T, 0.5 seconds with a damping ratio of...
Consider a unity-feedback control system with a PI controller Gpr(s) and a plant G(s) in cascade. In particular, the plant transfer function is given as 2. G(s) = s+4, and the PI controller transfer function is of the forrm KI p and Ki are the proportional and integral controller gains, respectively where K Design numerical values for Kp and Ki such that the closed-loop control system has a step- response settling time T, 0.5 seconds with a damping ratio of...
 Question 6 The open-loop transfer function G(s) of a control system is given as G(8)- s(s+2)(s +5) A proportional controller is used to control the system as shown in Figure 6 below: Y(s) R(s) + G(s) Figure 6: A control system with a proportional controller a) Assume Hp(s) is a proportional controller with the transfer function H,(s) kp. Determine, using the Routh-Hurwitz Stability Criterion, the value of kp for which the closed-loop system in Figure 6 is marginally stable. (6...
Question 6 The open-loop transfer function G(s) of a control system is given as G(8)- s(s+2)(s +5) A proportional controller is used to control the system as shown in Figure 6 below: Y(s) R(s) + G(s) Figure 6: A control system with a proportional controller a) Assume Hp(s) is a proportional controller with the transfer function H,(s) kp. Determine, using the Routh-Hurwitz Stability Criterion, the value of kp for which the closed-loop system in Figure 6 is marginally stable. (6...
 Consider the unity feedback system is given below R(S) C(s) G() with transfer function: G(s) = K s(s + 1)(s + 2)(8 + 6) a) Find the value of the gain K, that will make the system stable. b) Find the value of the gain K, that will make the system marginally stable. c) Find the actual location of the closed-loop poles when the system is marginally stable.
Consider the unity feedback system is given below R(S) C(s) G() with transfer function: G(s) = K s(s + 1)(s + 2)(8 + 6) a) Find the value of the gain K, that will make the system stable. b) Find the value of the gain K, that will make the system marginally stable. c) Find the actual location of the closed-loop poles when the system is marginally stable.
 Problem S Consider the control system shown in Figure 4 let Cand G,() -K and Gc (s) K (s-1) (s+2) (s+3) (a) Determine the open-loop system (i.e., G (s)) poles and zeros. (b) Determine the number of asymptotes and the angles of asymptotes. (c) Determine the break-in/break-out points (if any) (d) Sketch the root locus (e) Determine the value of K (if any) for which the system is marginally stable
Problem S Consider the control system shown in Figure 4 let Cand G,() -K and Gc (s) K (s-1) (s+2) (s+3) (a) Determine the open-loop system (i.e., G (s)) poles and zeros. (b) Determine the number of asymptotes and the angles of asymptotes. (c) Determine the break-in/break-out points (if any) (d) Sketch the root locus (e) Determine the value of K (if any) for which the system is marginally stable
 Problem 3: (30) Consider the following systen where K is a proportional gain (K>0). s-2 (a) Sketch the root locus using the below procedures. (1) find poles and zeros and locate on complex domain (2) find number of branches (3) find asymptotes including centroid and angles of asymptotes (4) intersection at imaginary axis (5) find the angle of departure (6) draw the root migration (b) Find the range of K for which the feedback system is asymptotically stable.
Problem 3:...
Problem 3: (30) Consider the following systen where K is a proportional gain (K>0). s-2 (a) Sketch the root locus using the below procedures. (1) find poles and zeros and locate on complex domain (2) find number of branches (3) find asymptotes including centroid and angles of asymptotes (4) intersection at imaginary axis (5) find the angle of departure (6) draw the root migration (b) Find the range of K for which the feedback system is asymptotically stable.
Problem 3:...
 Question 2 System Stability in the s-Domain and in the Frequency Domain: Bode Plots, Root Locus Plots and Routh- Hurwitz Criterion ofStability A unit feedback control system is to be stabilized using a Proportional Controller, as shown in Figure Q2.1. Proportional Controller Process The process transfer function is described as follows: Y(s) G(s) s2 +4s 100 s3 +4s2 5s 2 Figure Q2.1 Your task is to investigate the stability of the closed loop system using s-domain analysis by finding: a)...
Question 2 System Stability in the s-Domain and in the Frequency Domain: Bode Plots, Root Locus Plots and Routh- Hurwitz Criterion ofStability A unit feedback control system is to be stabilized using a Proportional Controller, as shown in Figure Q2.1. Proportional Controller Process The process transfer function is described as follows: Y(s) G(s) s2 +4s 100 s3 +4s2 5s 2 Figure Q2.1 Your task is to investigate the stability of the closed loop system using s-domain analysis by finding: a)...
 1. Consider the following feedback control system Controller Process 1 G(s) R(s) Y(s) $2+5s+6 Below are two potential controllers for this system: 1) Ge(s) K (Proportional controller) 2) Ge(s) K(1 1/s) (Proportional-integral controller) The design specifications are t 3.2s and P. 0. 10% for a unit step input (a) Determine the area on the S-plane where the dominant closed loop poles must be located such that the design requirements are satisfied. (b) Sketch the root locus with each of the...
1. Consider the following feedback control system Controller Process 1 G(s) R(s) Y(s) $2+5s+6 Below are two potential controllers for this system: 1) Ge(s) K (Proportional controller) 2) Ge(s) K(1 1/s) (Proportional-integral controller) The design specifications are t 3.2s and P. 0. 10% for a unit step input (a) Determine the area on the S-plane where the dominant closed loop poles must be located such that the design requirements are satisfied. (b) Sketch the root locus with each of the...
 Problem 3. (15 points) Consider the feedback system in Figure 3, where G(s)1 (s -1)3 Ge(s) G(s) Figure 3: Problem 3 1. Let the compensator be given by a pure gain, ie, Ge(s)-K, K 0 (a) Draw the root locus of the compensated system (b) Is it possible to stabilize the systems by selecting K appropriately? If so, find the range for K such that the closed-loop system is BIBO stable. If not, explain. 2. This time, let the compensator...
Problem 3. (15 points) Consider the feedback system in Figure 3, where G(s)1 (s -1)3 Ge(s) G(s) Figure 3: Problem 3 1. Let the compensator be given by a pure gain, ie, Ge(s)-K, K 0 (a) Draw the root locus of the compensated system (b) Is it possible to stabilize the systems by selecting K appropriately? If so, find the range for K such that the closed-loop system is BIBO stable. If not, explain. 2. This time, let the compensator...
 R(S) + C(s) K $++383+10s2+30s+150 1 A feedback system is described on the figure above. a. If K=450 find the number of closed-loop poles located on the RHS, LHS and on the jw-axis. b. Find the value of the gain K, which will produce undamped system step response (critical gain). Find the respective oscillating frequency. c. For which values of K the system will be (i) stable, (ii) not stable.
R(S) + C(s) K $++383+10s2+30s+150 1 A feedback system is described on the figure above. a. If K=450 find the number of closed-loop poles located on the RHS, LHS and on the jw-axis. b. Find the value of the gain K, which will produce undamped system step response (critical gain). Find the respective oscillating frequency. c. For which values of K the system will be (i) stable, (ii) not stable.
 Feedback Control of Dynamic System
Please Let me know how to solve this problem
(5) For the following unity-feedback control system, Y(s) R(s)E D(s) (s+ 2) we want to design a controller D(s) D(s)+a) that makes the closed-loop stable for certain positive K values. Design the parameters a and b to satisfy the design condition through the root- locus method
(5) For the following unity-feedback control system, Y(s) R(s)E D(s) (s+ 2) we want to design a controller D(s) D(s)+a)...
Feedback Control of Dynamic System
Please Let me know how to solve this problem
(5) For the following unity-feedback control system, Y(s) R(s)E D(s) (s+ 2) we want to design a controller D(s) D(s)+a) that makes the closed-loop stable for certain positive K values. Design the parameters a and b to satisfy the design condition through the root- locus method
(5) For the following unity-feedback control system, Y(s) R(s)E D(s) (s+ 2) we want to design a controller D(s) D(s)+a)...
Most questions answered within 3 hours.
-
The average length of time between arrivals at a turnpike
toll-booth is 26 seconds. What is...
asked 36 minutes ago -
(a) A piston at 6.1 atm contains a gas that occupies a volume of
3.5 L....
asked 1 hour ago -
Please answer true or false. Words
cannot be changed or added in to make it true...
asked 1 hour ago -
An empty test tube weighs 15.923 grams. Then,
MgCl2•6H2O is added into the test tube. After...
asked 1 hour ago -
Assume memory access is 10 units of time and disk access is
10000 units of time....
asked 2 hours ago -
1. Are all good samples random?
2. Magazines often report surveys giving statistics such as “63%...
asked 2 hours ago -
Under all the various types of market structures, firms
must eventually earn some economic profits for...
asked 2 hours ago -
Consider the following fitness regime for a single locus trait
with two co-dominant alleles: w11 =...
asked 2 hours ago -
A large cable company reports the following.
80% of its customers subscribe to its cable TV...
asked 2 hours ago -
Please answer the question in brief.
Discuss the role of ERP in organizations. Are ERP tools...
asked 2 hours ago -
Discuss the pros and cons of collaborative software such
as SameTime. Does it increase productivity? What...
asked 2 hours ago -
Buying your in-laws a gift because it’s expected is
due to the ____________ motive of gift-giving....
asked 2 hours ago