
Homework Answers
Add Answer to:
2. Work with matrix representations of linear transformations and use knowledge of matrix properties to prove...
1. Let V be a vector space with bases B and C. Suppose that T:V V is a linear map with matrix representations Ms(T)A and Me(T) B. Prove the following (a) T is one-to-one iff A is one-to-one. (b...
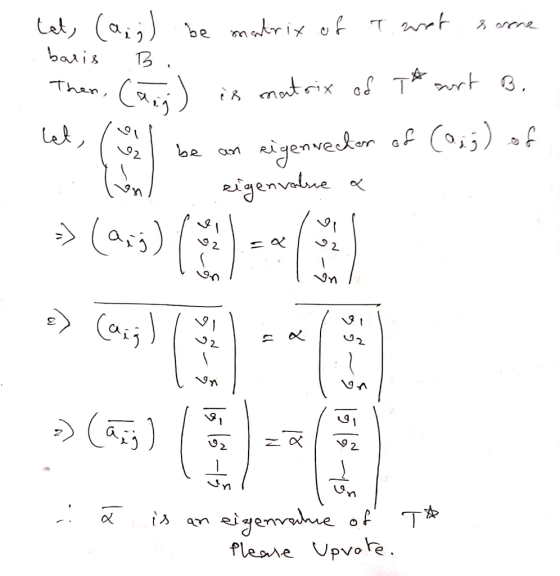
 1. Let V be a vector space with bases B and C. Suppose that T:V V is a linear map with matrix representations Ms(T)A and Me(T) B. Prove the following (a) T is one-to-one iff A is one-to-one. (b) λ is an eigenvalue of T iff λ is an eigenvalue of B. Consequently, A and B have the same eigenvalues (c) There exists an invertible matrix V such that A-V-BV
1. Let V be a vector space with bases B...
1. Let V be a vector space with bases B and C. Suppose that T:V V is a linear map with matrix representations Ms(T)A and Me(T) B. Prove the following (a) T is one-to-one iff A is one-to-one. (b) λ is an eigenvalue of T iff λ is an eigenvalue of B. Consequently, A and B have the same eigenvalues (c) There exists an invertible matrix V such that A-V-BV
1. Let V be a vector space with bases B...
3. Use the Spectral Theorem to prove that if T is a normal operator on a finite dimensional compl...
 Need answer to 5.
3. Use the Spectral Theorem to prove that if T is a normal operator on a finite dimensional complex inner product space V, then there exists a normal operator U on V such that T= U2 4. Give an example of a Hermitian operator T' on a finite dimensional inner product space V such that there does not exist a Hermitian operator U on V with T- U that is, Exercise 3 cannot be extended to...
Need answer to 5.
3. Use the Spectral Theorem to prove that if T is a normal operator on a finite dimensional complex inner product space V, then there exists a normal operator U on V such that T= U2 4. Give an example of a Hermitian operator T' on a finite dimensional inner product space V such that there does not exist a Hermitian operator U on V with T- U that is, Exercise 3 cannot be extended to...
I need all details. Thx 2. Give an example of a matrix with the indicated properties. If the property cannot be attained, explain why not (a) A is 2 x 4 and has rank 3. (b) A is 3 × 3 and has dete...
 I need all details. Thx
2. Give an example of a matrix with the indicated properties. If the property cannot be attained, explain why not (a) A is 2 x 4 and has rank 3. (b) A is 3 × 3 and has determinant 1. (c) A is 3 × 6 and has a 3 dimensional row space and a 6 dinensional column space (d) A is 3 × 3 and has a 2 dimensional null space. (e) A is...
I need all details. Thx
2. Give an example of a matrix with the indicated properties. If the property cannot be attained, explain why not (a) A is 2 x 4 and has rank 3. (b) A is 3 × 3 and has determinant 1. (c) A is 3 × 6 and has a 3 dimensional row space and a 6 dinensional column space (d) A is 3 × 3 and has a 2 dimensional null space. (e) A is...
Let V be a finite dimensional vector space over R with an inner product 〈x, y〉 ∈ R for x, y ∈ V . (a) (3points) Let λ∈...
Let V be a finite dimensional vector space over R with an inner product 〈x, y〉 ∈ R for x, y ∈ V . (a) (3points) Let λ∈R with λ>0. Show that 〈x,y〉′ = λ〈x,y〉, for x,y ∈ V, (b) (2 points) Let T : V → V be a linear operator, such that 〈T(x),T(y)〉 = 〈x,y〉, for all x,y ∈ V. Show that T is one-to-one. (c) (2 points) Recall that the norm of a vector x ∈ V...
s={(8.60) :) :) is a basis of M3x2(R)? (d) (1 point) The set = {(1 9:(....
 s={(8.60) :) :) is a basis of M3x2(R)? (d) (1 point) The set = {(1 9:(. :) : 6 1) (1 1) (1 :) :()} is linearly independent. (e) (1 point) For a linear transformation A:R" + Rd the dimension of the nullspace is larger than d. (f) (1 points) Let AC M4x4 be a diagonal matrix. A is similar to a matrix A which has eigenvalues 1,2,3 with algebraic multiplicities 1,2, 1 and geometric multiplicities 1,1, 1 respectively. 8....
s={(8.60) :) :) is a basis of M3x2(R)? (d) (1 point) The set = {(1 9:(. :) : 6 1) (1 1) (1 :) :()} is linearly independent. (e) (1 point) For a linear transformation A:R" + Rd the dimension of the nullspace is larger than d. (f) (1 points) Let AC M4x4 be a diagonal matrix. A is similar to a matrix A which has eigenvalues 1,2,3 with algebraic multiplicities 1,2, 1 and geometric multiplicities 1,1, 1 respectively. 8....
Use the following information To help you solve the following questions. Show all work for thumbs...
 Use the following information
To help you solve the following questions. Show all
work for thumbs up.
3.1 Rotations and Angular-Momentum Commutation Relations 159 We are particularly interested in an infinitesimal form of Ry: (3.1.4) where terms of order & and higher are ignored. Likewise, we have R0= ° :- R(E) = 1 (3.1.5) and (3.1.5b) - E01 which may be read from (3.1.4) by cyclic permutations of x, y, zthat is, x y , y → 2,2 → x....
Use the following information
To help you solve the following questions. Show all
work for thumbs up.
3.1 Rotations and Angular-Momentum Commutation Relations 159 We are particularly interested in an infinitesimal form of Ry: (3.1.4) where terms of order & and higher are ignored. Likewise, we have R0= ° :- R(E) = 1 (3.1.5) and (3.1.5b) - E01 which may be read from (3.1.4) by cyclic permutations of x, y, zthat is, x y , y → 2,2 → x....
 1. Let V be a vector space with bases B and C. Suppose that T:V V is a linear map with matrix representations Ms(T)A and Me(T) B. Prove the following (a) T is one-to-one iff A is one-to-one. (b) λ is an eigenvalue of T iff λ is an eigenvalue of B. Consequently, A and B have the same eigenvalues (c) There exists an invertible matrix V such that A-V-BV
1. Let V be a vector space with bases B...
1. Let V be a vector space with bases B and C. Suppose that T:V V is a linear map with matrix representations Ms(T)A and Me(T) B. Prove the following (a) T is one-to-one iff A is one-to-one. (b) λ is an eigenvalue of T iff λ is an eigenvalue of B. Consequently, A and B have the same eigenvalues (c) There exists an invertible matrix V such that A-V-BV
1. Let V be a vector space with bases B...
 Need answer to 5.
3. Use the Spectral Theorem to prove that if T is a normal operator on a finite dimensional complex inner product space V, then there exists a normal operator U on V such that T= U2 4. Give an example of a Hermitian operator T' on a finite dimensional inner product space V such that there does not exist a Hermitian operator U on V with T- U that is, Exercise 3 cannot be extended to...
Need answer to 5.
3. Use the Spectral Theorem to prove that if T is a normal operator on a finite dimensional complex inner product space V, then there exists a normal operator U on V such that T= U2 4. Give an example of a Hermitian operator T' on a finite dimensional inner product space V such that there does not exist a Hermitian operator U on V with T- U that is, Exercise 3 cannot be extended to...
 I need all details. Thx
2. Give an example of a matrix with the indicated properties. If the property cannot be attained, explain why not (a) A is 2 x 4 and has rank 3. (b) A is 3 × 3 and has determinant 1. (c) A is 3 × 6 and has a 3 dimensional row space and a 6 dinensional column space (d) A is 3 × 3 and has a 2 dimensional null space. (e) A is...
I need all details. Thx
2. Give an example of a matrix with the indicated properties. If the property cannot be attained, explain why not (a) A is 2 x 4 and has rank 3. (b) A is 3 × 3 and has determinant 1. (c) A is 3 × 6 and has a 3 dimensional row space and a 6 dinensional column space (d) A is 3 × 3 and has a 2 dimensional null space. (e) A is...
 s={(8.60) :) :) is a basis of M3x2(R)? (d) (1 point) The set = {(1 9:(. :) : 6 1) (1 1) (1 :) :()} is linearly independent. (e) (1 point) For a linear transformation A:R" + Rd the dimension of the nullspace is larger than d. (f) (1 points) Let AC M4x4 be a diagonal matrix. A is similar to a matrix A which has eigenvalues 1,2,3 with algebraic multiplicities 1,2, 1 and geometric multiplicities 1,1, 1 respectively. 8....
s={(8.60) :) :) is a basis of M3x2(R)? (d) (1 point) The set = {(1 9:(. :) : 6 1) (1 1) (1 :) :()} is linearly independent. (e) (1 point) For a linear transformation A:R" + Rd the dimension of the nullspace is larger than d. (f) (1 points) Let AC M4x4 be a diagonal matrix. A is similar to a matrix A which has eigenvalues 1,2,3 with algebraic multiplicities 1,2, 1 and geometric multiplicities 1,1, 1 respectively. 8....
 Use the following information
To help you solve the following questions. Show all
work for thumbs up.
3.1 Rotations and Angular-Momentum Commutation Relations 159 We are particularly interested in an infinitesimal form of Ry: (3.1.4) where terms of order & and higher are ignored. Likewise, we have R0= ° :- R(E) = 1 (3.1.5) and (3.1.5b) - E01 which may be read from (3.1.4) by cyclic permutations of x, y, zthat is, x y , y → 2,2 → x....
Use the following information
To help you solve the following questions. Show all
work for thumbs up.
3.1 Rotations and Angular-Momentum Commutation Relations 159 We are particularly interested in an infinitesimal form of Ry: (3.1.4) where terms of order & and higher are ignored. Likewise, we have R0= ° :- R(E) = 1 (3.1.5) and (3.1.5b) - E01 which may be read from (3.1.4) by cyclic permutations of x, y, zthat is, x y , y → 2,2 → x....
Most questions answered within 3 hours.
-
1. An object weighing 40 N rests on a surface. The coefficient
of friction is 0.35....
asked 37 minutes ago -
Investor company owns 35% of investee company voting stock and
accounts for the investment under the...
asked 1 hour ago -
The number of major faults on a randomly chosen 1 km stretch of
highway has a...
asked 2 hours ago -
Consider the competitive environment of Starbuck's, Progressive
Insurance, a manufacturing firm with low turnover, or a...
asked 2 hours ago -
3. Gains from trade
Consider two neighbouring island countries called Euphoria and
Contente. They each have...
asked 4 hours ago -
A business executive has the option to invest money in two
plans: Plan A guarantees that...
asked 7 hours ago -
Hello, can someone please help me answer this question?
How much heat is absorbed by a...
asked 7 hours ago -
. A marketing researcher conducted a survey of 25 shoppers
randomly selected at the local mall...
asked 7 hours ago -
Create an comprehensive response to the
following:
Antimicrobial agents work on a multitude of microbes (bacteria,...
asked 7 hours ago -
6.13 LAB: Step counter. Section 6.3.
A pedometer treats walking 2,000 steps as walking 1 mile....
asked 7 hours ago -
(14.2) A block of mass m = 10 kg riding on a frictionless
horizontal plane is...
asked 7 hours ago -
Use any search engine to search for articles about Starbucks
partnership with Tata Companies in India...
asked 7 hours ago