Find the equations of motion using D’alembert principle.

Homework Answers
D'Alembert's form of the principle of virtual work states that a system of rigid bodies is in dynamic equilibrium when the virtual work of the sum of the applied forces and the inertial forces is zero for any virtual displacement of the system. Thus, dynamic equilibrium of a system of n rigid bodies with m generalized coordinates requires that is to be

for any set of virtual displacements δqj. This condition yields m equations,

which can also be written as,
 .....................(1)
.....................(1)
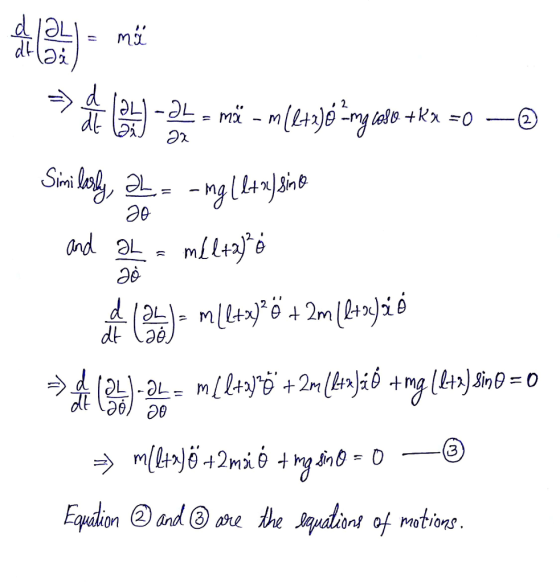
The result is a set of m equations of motion that define the
dynamics of the rigid body system. Where, T is the Kinetic energy
and  is the
generalised force. Here, if we assume velocity independent
potential, we can write generalised Force as gradient of a
potential V.
is the
generalised force. Here, if we assume velocity independent
potential, we can write generalised Force as gradient of a
potential V.

Therefore, we can re-write (1) as,

Where, L=T-V known as the Lagrangian. And the above equation is called as the Lagrangian equation of motion.
Let us consider the system as a pendulum made of a spring with a
mass m on the end . The spring is arranged to lie in a straight
line. The equilibrium length of the spring is  . Let the spring have
length
+ x(t), and let its angle with the vertical be θ(t). Now, Let us
find the Kinetic Energy and Potential Energy of the system. Here,
the generalised coordinates are displacement of spring 'x' and
angle of the pendulum θ.
. Let the spring have
length
+ x(t), and let its angle with the vertical be θ(t). Now, Let us
find the Kinetic Energy and Potential Energy of the system. Here,
the generalised coordinates are displacement of spring 'x' and
angle of the pendulum θ.


Equations of Motion using Lagrange Equation Use Lagranges equations to derive the equations of motion for...
 Equations of Motion using Lagrange Equation
Use Lagranges equations to derive the equations of motion for
the system.
Equations of Motion using Lagrange Equation
Use Lagranges equations to derive the equations of motion for
the system.
Using Lagrange's method, find the equations of motion for: a) A simple Atwood machine. b) A...
Using Lagrange's method, find the equations of motion for: a) A simple Atwood machine. b) A particle that slides along a smooth inclined plane.
Equations of Motion: Lagrange's Method Use Lagrange's Method to find the Equations of Motion for the...
 Equations of Motion: Lagrange's Method Use Lagrange's Method to find the Equations of Motion for the following systems. Define a datum point at the static equilibrium point, solve for the initial spring forces, and substitute them in to get simplified answers. M M
Equations of Motion: Lagrange's Method Use Lagrange's Method to find the Equations of Motion for the following systems. Define a datum point at the static equilibrium point, solve for the initial spring forces, and substitute them in to get simplified answers. M M
Practice Exercises Derive the equations of motion, using Newton s second law of motion, for the g...
 Practice Exercises Derive the equations of motion, using Newton s second law of motion, for the given systems below and write these equations in matrix form mt2 m11
Practice Exercises Derive the equations of motion, using Newton s second law of motion, for the given systems below and write these equations in matrix form mt2 m11
Practice Exercises Derive the equations of motion, using Newton s second law of motion, for the given systems below and write these equations in matrix form mt2 m11
Practice Exercises Derive the equations of motion, using Newton s second law of motion, for the given systems below and write these equations in matrix form mt2 m11
Derive the equations of motion of the system shown in the Figure by using Lagrange's equations...
 Derive the equations of motion of the system shown in the Figure by using Lagrange's equations with x and generalized coordinates. Wu
Derive the equations of motion of the system shown in the Figure by using Lagrange's equations with x and generalized coordinates. Wu
Question 4 (10 marks) Using Lagrange's equations to derive the equations of motion for the system...
 Question 4 (10 marks) Using Lagrange's equations to derive the equations of motion for the system shown below. k k m2
Question 4 (10 marks) Using Lagrange's equations to derive the equations of motion for the system shown below. k k m2
Given the six-degree of freedom equations of motion below, Translational Equations of motion V=PW _ RU...
 Given the six-degree of freedom equations of motion below, Translational Equations of motion V=PW _ RU + g cos@sinO +Y1m W=QU-. PV + g cos@cost+21m Rotational Equations of motion cry Linearize (1) the z-axis (W) translational equation of motion, and (2) the rotational equation of motion about the z-axis (R) using the method from the notes.
Given the six-degree of freedom equations of motion below, Translational Equations of motion V=PW _ RU + g cos@sinO +Y1m W=QU-. PV + g cos@cost+21m Rotational Equations of motion cry Linearize (1) the z-axis (W) translational equation of motion, and (2) the rotational equation of motion about the z-axis (R) using the method from the notes.
4. Show that the system of equations has a unique solution, using the contraction mapping principle....
 4. Show that the system of equations has a unique solution, using the contraction mapping principle. (Hm Either choose a clever norm on R3, or estimate using the Schwarz in equality.)
4. Show that the system of equations has a unique solution, using the contraction mapping principle. (Hm Either choose a clever norm on R3, or estimate using the Schwarz in equality.)
1. Derive the equations of motion of the system shown in Fig 1 by using Lagrange's...
 1. Derive the equations of motion of the system shown in Fig 1 by using Lagrange's equations. Find the natural frequencies and mode shapes of the dynamical system for k 1 N/m, k-2 N/m, k I N/m, and mi 2 kg, m l kg, m -2 kg. scale the eigenvectors matrix Ф in order to achieve a mass normalized eigenvectors matrix Φ such that: F40 Fan Fig. 1
1. Derive the equations of motion of the system shown in Fig 1 by using Lagrange's equations. Find the natural frequencies and mode shapes of the dynamical system for k 1 N/m, k-2 N/m, k I N/m, and mi 2 kg, m l kg, m -2 kg. scale the eigenvectors matrix Ф in order to achieve a mass normalized eigenvectors matrix Φ such that: F40 Fan Fig. 1
Quadratic Equations can be used to model projectile motion. For this discussion, find an example of...
Quadratic Equations can be used to model projectile motion. For this discussion, find an example of a quadratic function that models projectile motion, explain what the variables are in the function and show an example of how to use the function to find the height of an object after a certain amount of time
 Equations of Motion using Lagrange Equation
Use Lagranges equations to derive the equations of motion for
the system.
Equations of Motion using Lagrange Equation
Use Lagranges equations to derive the equations of motion for
the system.
 Equations of Motion: Lagrange's Method Use Lagrange's Method to find the Equations of Motion for the following systems. Define a datum point at the static equilibrium point, solve for the initial spring forces, and substitute them in to get simplified answers. M M
Equations of Motion: Lagrange's Method Use Lagrange's Method to find the Equations of Motion for the following systems. Define a datum point at the static equilibrium point, solve for the initial spring forces, and substitute them in to get simplified answers. M M
 Practice Exercises Derive the equations of motion, using Newton s second law of motion, for the given systems below and write these equations in matrix form mt2 m11
Practice Exercises Derive the equations of motion, using Newton s second law of motion, for the given systems below and write these equations in matrix form mt2 m11
Practice Exercises Derive the equations of motion, using Newton s second law of motion, for the given systems below and write these equations in matrix form mt2 m11
Practice Exercises Derive the equations of motion, using Newton s second law of motion, for the given systems below and write these equations in matrix form mt2 m11
 Derive the equations of motion of the system shown in the Figure by using Lagrange's equations with x and generalized coordinates. Wu
Derive the equations of motion of the system shown in the Figure by using Lagrange's equations with x and generalized coordinates. Wu
 Question 4 (10 marks) Using Lagrange's equations to derive the equations of motion for the system shown below. k k m2
Question 4 (10 marks) Using Lagrange's equations to derive the equations of motion for the system shown below. k k m2
 Given the six-degree of freedom equations of motion below, Translational Equations of motion V=PW _ RU + g cos@sinO +Y1m W=QU-. PV + g cos@cost+21m Rotational Equations of motion cry Linearize (1) the z-axis (W) translational equation of motion, and (2) the rotational equation of motion about the z-axis (R) using the method from the notes.
Given the six-degree of freedom equations of motion below, Translational Equations of motion V=PW _ RU + g cos@sinO +Y1m W=QU-. PV + g cos@cost+21m Rotational Equations of motion cry Linearize (1) the z-axis (W) translational equation of motion, and (2) the rotational equation of motion about the z-axis (R) using the method from the notes.
 4. Show that the system of equations has a unique solution, using the contraction mapping principle. (Hm Either choose a clever norm on R3, or estimate using the Schwarz in equality.)
4. Show that the system of equations has a unique solution, using the contraction mapping principle. (Hm Either choose a clever norm on R3, or estimate using the Schwarz in equality.)
 1. Derive the equations of motion of the system shown in Fig 1 by using Lagrange's equations. Find the natural frequencies and mode shapes of the dynamical system for k 1 N/m, k-2 N/m, k I N/m, and mi 2 kg, m l kg, m -2 kg. scale the eigenvectors matrix Ф in order to achieve a mass normalized eigenvectors matrix Φ such that: F40 Fan Fig. 1
1. Derive the equations of motion of the system shown in Fig 1 by using Lagrange's equations. Find the natural frequencies and mode shapes of the dynamical system for k 1 N/m, k-2 N/m, k I N/m, and mi 2 kg, m l kg, m -2 kg. scale the eigenvectors matrix Ф in order to achieve a mass normalized eigenvectors matrix Φ such that: F40 Fan Fig. 1
Most questions answered within 3 hours.
-
4. Determine the theoretical yield of P2O5, when 3.07 g of P
reacts with 6.09 g...
asked 34 minutes ago -
Explain the PEST analysis and how a marketer would use this when
putting together a marketing...
asked 17 minutes ago -
S sells property with a $500 basis to B for $450, and B later
sells the...
asked 1 hour ago -
True/False Questions
1.
In interpreting an agreement, courts generally apply a
subjective standard.
2.
If, after...
asked 23 minutes ago -
On January 1, 20X7, Green Corp. paid $1,020,000 to acquire Wax
Co. Wax maintained separate incorporation....
asked 1 hour ago -
C++
Write a class Fraction that defines adding, subtracting,
multiplying, and dividing fractions by overloading standard...
asked 2 hours ago -
This java code won't run and I can't figure out the problem with
it. Please help...
asked 3 hours ago -
Trace the following recursive methods:
a) isPal with the string “abccda”
b) isAnBn with the string...
asked 4 hours ago -
1. Which of the following is false about photosynthesis?
A. ATP is the molecule used to...
asked 5 hours ago -
A simple random sample of size n=64 is obtained from a
population with a mean of...
asked 6 hours ago -
(2 dimensions, 1 object, 2 accelerations)
1) A projectile is thrown with a wind. The wind...
asked 7 hours ago -
Brian makes $34,100 per year. How much can Brian expect to
contribute to FICA taxes in...
asked 8 hours ago