
Homework Answers

Add Answer to:
7. Systems of first order equations higher order. Consider the system can sometimes be transformed into...
Consider the following. Xi' = 3x1 - 2x2 x1(0) = 3 xz' = 2x1 – 2x2,...
 Consider the following. Xi' = 3x1 - 2x2 x1(0) = 3 xz' = 2x1 – 2x2, *2(0) = (a) Transform the given system into a single equation of second order by solving the first equation for x2 and substitute into the second equation, thereby obtaining a second order equation for X1. (Use xp1 for xı' and xpP1 for x1".) xpP1 – xP1 – 2x1 = 0 (b) Find X1 and x2 that also satisfy the initial conditions. *2(t) =
Consider the following. Xi' = 3x1 - 2x2 x1(0) = 3 xz' = 2x1 – 2x2, *2(0) = (a) Transform the given system into a single equation of second order by solving the first equation for x2 and substitute into the second equation, thereby obtaining a second order equation for X1. (Use xp1 for xı' and xpP1 for x1".) xpP1 – xP1 – 2x1 = 0 (b) Find X1 and x2 that also satisfy the initial conditions. *2(t) =
Second order systems of ordinary differential equations (ODE) often describe motional systems involving multiple masses. Solve the following second order system of ODE using Laplace transform meth...
 Second order systems of ordinary differential equations (ODE) often describe motional systems involving multiple masses. Solve the following second order system of ODE using Laplace transform method: Xy-=5x1-2x2 + Mu(t-1) x2-=-2x1 + 2x2 x,(t) and x2(t) refer to the motions of the two masses. Consider these initial conditions: x1 (0) = 1, x; (0)-0, x2(0) = 3, x(0) 0
Second order systems of ordinary differential equations (ODE) often describe motional systems involving multiple masses. Solve the following second order system...
Second order systems of ordinary differential equations (ODE) often describe motional systems involving multiple masses. Solve the following second order system of ODE using Laplace transform method: Xy-=5x1-2x2 + Mu(t-1) x2-=-2x1 + 2x2 x,(t) and x2(t) refer to the motions of the two masses. Consider these initial conditions: x1 (0) = 1, x; (0)-0, x2(0) = 3, x(0) 0
Second order systems of ordinary differential equations (ODE) often describe motional systems involving multiple masses. Solve the following second order system...
2) Just as an nth order equation can be transformed to a system of n first...
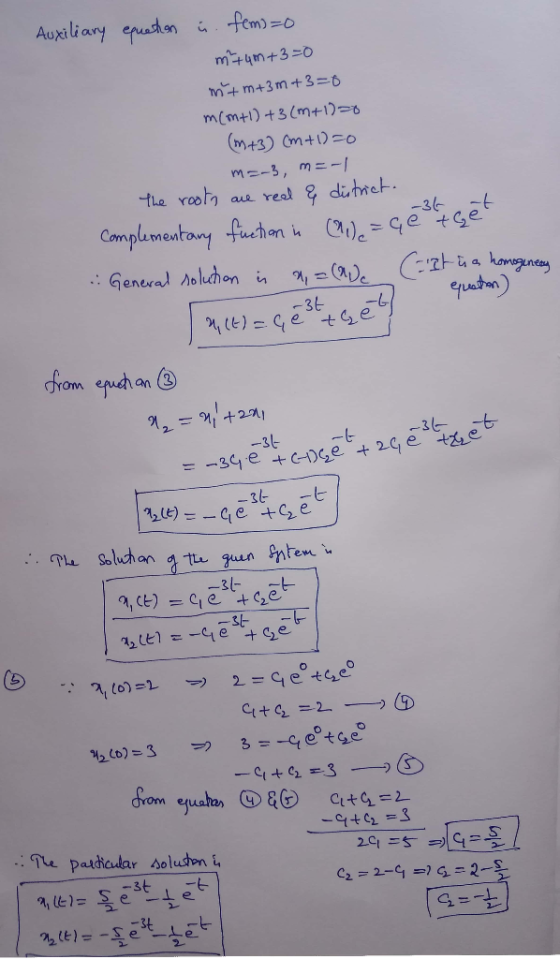
 2) Just as an nth order equation can be transformed to a system of n first order equations, a system of m n" order equations can be transformed into a system of mn first order equations. Transform the system of two second order equations into a system of first order equations. Again, your variables are x,, X2, X3..... x" + 3x' + 4x – 2y=0, y" + 2y' – 3x + y =é cost, where x = x(t), y =...
2) Just as an nth order equation can be transformed to a system of n first order equations, a system of m n" order equations can be transformed into a system of mn first order equations. Transform the system of two second order equations into a system of first order equations. Again, your variables are x,, X2, X3..... x" + 3x' + 4x – 2y=0, y" + 2y' – 3x + y =é cost, where x = x(t), y =...
10. Use variation of parameters to solve the system of first order differential equations: x1(t) = 2x1-12 10. Use variation of parameters to solve the system of first order differential equation...
 10. Use variation of parameters to solve the system of first order differential equations: x1(t) = 2x1-12
10. Use variation of parameters to solve the system of first order differential equations: x1(t) = 2x1-12
10. Use variation of parameters to solve the system of first order differential equations: x1(t) = 2x1-12
10. Use variation of parameters to solve the system of first order differential equations: x1(t) = 2x1-12
2. Solve the following linear systems of equations by writing the system as a matrix equation...
 2. Solve the following linear systems of equations by writing the system as a matrix equation Ax = b and using the inverse of the matrix A. (You may use a calculator or computer software to find A-1. Or you can find A-1 by row-reduction.) 3x1 – 2x2 + 4x3 = 1 x1 + x2 – 2x3 = 3 2x1 + x2 + x3 = 8 321 – 2x2 + 4x3 = 10 X1 + x2 – 2x3 = 30...
2. Solve the following linear systems of equations by writing the system as a matrix equation Ax = b and using the inverse of the matrix A. (You may use a calculator or computer software to find A-1. Or you can find A-1 by row-reduction.) 3x1 – 2x2 + 4x3 = 1 x1 + x2 – 2x3 = 3 2x1 + x2 + x3 = 8 321 – 2x2 + 4x3 = 10 X1 + x2 – 2x3 = 30...
Question. Systems of ODEs of higher order can be solved by the Laplace transform method. As...
 Question. Systems of ODEs of higher order can be solved by the Laplace transform method. As an important application, typical of many similar mechanical systems, consider coupled vibrating masses on springs. Wrovov The mechanical system in the Figure consists of two bodies of mass 1 on three springs of the same spring constant k and of negligibly small masses of the springs. Also damping is assumed to be practically zero. Then the model of the physical system is the system...
Question. Systems of ODEs of higher order can be solved by the Laplace transform method. As an important application, typical of many similar mechanical systems, consider coupled vibrating masses on springs. Wrovov The mechanical system in the Figure consists of two bodies of mass 1 on three springs of the same spring constant k and of negligibly small masses of the springs. Also damping is assumed to be practically zero. Then the model of the physical system is the system...
6. Solve the system of first order differential equations: x'(t) = X1 + X2 x2(t)x 3x2 6. Solve the system of first order differential equations: x'(t) = X1 + X2 x2(t)x 3x2
 6. Solve the system of first order differential equations: x'(t) = X1 + X2 x2(t)x 3x2
6. Solve the system of first order differential equations: x'(t) = X1 + X2 x2(t)x 3x2
6. Solve the system of first order differential equations: x'(t) = X1 + X2 x2(t)x 3x2
6. Solve the system of first order differential equations: x'(t) = X1 + X2 x2(t)x 3x2
Write the system of linear equations in the form Ax = b and solve this matrix...
 Write the system of linear equations in the form Ax = b and solve this matrix equation for x. = 9 -X1 + X2 -2x1 + x2 = 0 (No Response) (No Response) X1 1- [:)] (No Response) (No Response) X2 (No Response) X1 X2 (No Response)
Write the system of linear equations in the form Ax = b and solve this matrix equation for x. = 9 -X1 + X2 -2x1 + x2 = 0 (No Response) (No Response) X1 1- [:)] (No Response) (No Response) X2 (No Response) X1 X2 (No Response)
Problem 4. The higher order differential equation and initial conditions are shown as follows: = dy...
 Problem 4. The higher order differential equation and initial conditions are shown as follows: = dy dy +y?, y(0) = 1, y'(0) = -1, "(0) = 2 dt3 dt (a) [5pts. Transform the above initial value problem into an equivalent first order differential system, including initial conditions. (b) [2pts.] Express the system and the initial condition in (a) in vector form. (c) [4pts.] Using the second order Runge Kutta method as follows Ū* = Ūi + hĚ(ti, Ūi) h =...
Problem 4. The higher order differential equation and initial conditions are shown as follows: = dy dy +y?, y(0) = 1, y'(0) = -1, "(0) = 2 dt3 dt (a) [5pts. Transform the above initial value problem into an equivalent first order differential system, including initial conditions. (b) [2pts.] Express the system and the initial condition in (a) in vector form. (c) [4pts.] Using the second order Runge Kutta method as follows Ū* = Ūi + hĚ(ti, Ūi) h =...
Using the Gauss-Seidel Method to solve the equations in the same order listed below with an...
 Using the Gauss-Seidel Method to solve the equations in the same order listed below with an initial guess of x1 = X2 = X3 = 1, what is the estimated value of x2 after 1 iteration? -8x1 + x2 - 2x3 = -20 2x1 - 6x2 - x3 = -38 -3x1 - x2 + 7x3 = -34 0 6.50 O 6.96 0 100 0 2.38
Using the Gauss-Seidel Method to solve the equations in the same order listed below with an initial guess of x1 = X2 = X3 = 1, what is the estimated value of x2 after 1 iteration? -8x1 + x2 - 2x3 = -20 2x1 - 6x2 - x3 = -38 -3x1 - x2 + 7x3 = -34 0 6.50 O 6.96 0 100 0 2.38
 Consider the following. Xi' = 3x1 - 2x2 x1(0) = 3 xz' = 2x1 – 2x2, *2(0) = (a) Transform the given system into a single equation of second order by solving the first equation for x2 and substitute into the second equation, thereby obtaining a second order equation for X1. (Use xp1 for xı' and xpP1 for x1".) xpP1 – xP1 – 2x1 = 0 (b) Find X1 and x2 that also satisfy the initial conditions. *2(t) =
Consider the following. Xi' = 3x1 - 2x2 x1(0) = 3 xz' = 2x1 – 2x2, *2(0) = (a) Transform the given system into a single equation of second order by solving the first equation for x2 and substitute into the second equation, thereby obtaining a second order equation for X1. (Use xp1 for xı' and xpP1 for x1".) xpP1 – xP1 – 2x1 = 0 (b) Find X1 and x2 that also satisfy the initial conditions. *2(t) =
 Second order systems of ordinary differential equations (ODE) often describe motional systems involving multiple masses. Solve the following second order system of ODE using Laplace transform method: Xy-=5x1-2x2 + Mu(t-1) x2-=-2x1 + 2x2 x,(t) and x2(t) refer to the motions of the two masses. Consider these initial conditions: x1 (0) = 1, x; (0)-0, x2(0) = 3, x(0) 0
Second order systems of ordinary differential equations (ODE) often describe motional systems involving multiple masses. Solve the following second order system...
Second order systems of ordinary differential equations (ODE) often describe motional systems involving multiple masses. Solve the following second order system of ODE using Laplace transform method: Xy-=5x1-2x2 + Mu(t-1) x2-=-2x1 + 2x2 x,(t) and x2(t) refer to the motions of the two masses. Consider these initial conditions: x1 (0) = 1, x; (0)-0, x2(0) = 3, x(0) 0
Second order systems of ordinary differential equations (ODE) often describe motional systems involving multiple masses. Solve the following second order system...
 2) Just as an nth order equation can be transformed to a system of n first order equations, a system of m n" order equations can be transformed into a system of mn first order equations. Transform the system of two second order equations into a system of first order equations. Again, your variables are x,, X2, X3..... x" + 3x' + 4x – 2y=0, y" + 2y' – 3x + y =é cost, where x = x(t), y =...
2) Just as an nth order equation can be transformed to a system of n first order equations, a system of m n" order equations can be transformed into a system of mn first order equations. Transform the system of two second order equations into a system of first order equations. Again, your variables are x,, X2, X3..... x" + 3x' + 4x – 2y=0, y" + 2y' – 3x + y =é cost, where x = x(t), y =...
 10. Use variation of parameters to solve the system of first order differential equations: x1(t) = 2x1-12
10. Use variation of parameters to solve the system of first order differential equations: x1(t) = 2x1-12
10. Use variation of parameters to solve the system of first order differential equations: x1(t) = 2x1-12
10. Use variation of parameters to solve the system of first order differential equations: x1(t) = 2x1-12
 2. Solve the following linear systems of equations by writing the system as a matrix equation Ax = b and using the inverse of the matrix A. (You may use a calculator or computer software to find A-1. Or you can find A-1 by row-reduction.) 3x1 – 2x2 + 4x3 = 1 x1 + x2 – 2x3 = 3 2x1 + x2 + x3 = 8 321 – 2x2 + 4x3 = 10 X1 + x2 – 2x3 = 30...
2. Solve the following linear systems of equations by writing the system as a matrix equation Ax = b and using the inverse of the matrix A. (You may use a calculator or computer software to find A-1. Or you can find A-1 by row-reduction.) 3x1 – 2x2 + 4x3 = 1 x1 + x2 – 2x3 = 3 2x1 + x2 + x3 = 8 321 – 2x2 + 4x3 = 10 X1 + x2 – 2x3 = 30...
 Question. Systems of ODEs of higher order can be solved by the Laplace transform method. As an important application, typical of many similar mechanical systems, consider coupled vibrating masses on springs. Wrovov The mechanical system in the Figure consists of two bodies of mass 1 on three springs of the same spring constant k and of negligibly small masses of the springs. Also damping is assumed to be practically zero. Then the model of the physical system is the system...
Question. Systems of ODEs of higher order can be solved by the Laplace transform method. As an important application, typical of many similar mechanical systems, consider coupled vibrating masses on springs. Wrovov The mechanical system in the Figure consists of two bodies of mass 1 on three springs of the same spring constant k and of negligibly small masses of the springs. Also damping is assumed to be practically zero. Then the model of the physical system is the system...
 6. Solve the system of first order differential equations: x'(t) = X1 + X2 x2(t)x 3x2
6. Solve the system of first order differential equations: x'(t) = X1 + X2 x2(t)x 3x2
6. Solve the system of first order differential equations: x'(t) = X1 + X2 x2(t)x 3x2
6. Solve the system of first order differential equations: x'(t) = X1 + X2 x2(t)x 3x2
 Write the system of linear equations in the form Ax = b and solve this matrix equation for x. = 9 -X1 + X2 -2x1 + x2 = 0 (No Response) (No Response) X1 1- [:)] (No Response) (No Response) X2 (No Response) X1 X2 (No Response)
Write the system of linear equations in the form Ax = b and solve this matrix equation for x. = 9 -X1 + X2 -2x1 + x2 = 0 (No Response) (No Response) X1 1- [:)] (No Response) (No Response) X2 (No Response) X1 X2 (No Response)
 Problem 4. The higher order differential equation and initial conditions are shown as follows: = dy dy +y?, y(0) = 1, y'(0) = -1, "(0) = 2 dt3 dt (a) [5pts. Transform the above initial value problem into an equivalent first order differential system, including initial conditions. (b) [2pts.] Express the system and the initial condition in (a) in vector form. (c) [4pts.] Using the second order Runge Kutta method as follows Ū* = Ūi + hĚ(ti, Ūi) h =...
Problem 4. The higher order differential equation and initial conditions are shown as follows: = dy dy +y?, y(0) = 1, y'(0) = -1, "(0) = 2 dt3 dt (a) [5pts. Transform the above initial value problem into an equivalent first order differential system, including initial conditions. (b) [2pts.] Express the system and the initial condition in (a) in vector form. (c) [4pts.] Using the second order Runge Kutta method as follows Ū* = Ūi + hĚ(ti, Ūi) h =...
 Using the Gauss-Seidel Method to solve the equations in the same order listed below with an initial guess of x1 = X2 = X3 = 1, what is the estimated value of x2 after 1 iteration? -8x1 + x2 - 2x3 = -20 2x1 - 6x2 - x3 = -38 -3x1 - x2 + 7x3 = -34 0 6.50 O 6.96 0 100 0 2.38
Using the Gauss-Seidel Method to solve the equations in the same order listed below with an initial guess of x1 = X2 = X3 = 1, what is the estimated value of x2 after 1 iteration? -8x1 + x2 - 2x3 = -20 2x1 - 6x2 - x3 = -38 -3x1 - x2 + 7x3 = -34 0 6.50 O 6.96 0 100 0 2.38
Most questions answered within 3 hours.
-
For the element arsenic, which one of the following sets of
quantum numbers could not apply...
asked 2 minutes ago -
Compare and contrast the architectures of 3 types of ADCs:
Flash, SAR, and pipelined. Use the...
asked 3 minutes ago -
Given P(A) = 0.40, P(B) = 0.50, P(A ∩ B) = 0.15. Which of the
following...
asked 8 minutes ago -
Explain changes in workforce participation for women with
children. What legislation exists related to work and...
asked 10 minutes ago -
How high must a pointed arch be if it is to span a
space 4.2 m...
asked 15 minutes ago -
A housepainter who weighs 750 N stands 0.6 m from one end of a
2.0 m...
asked 17 minutes ago -
Implement Singly Linked List detectLoop in Java.
It would check whether the linked list contains a...
asked 20 minutes ago -
A small mailbag is released from a helicopter that is descending
steadily at 2.10 m/s.
After...
asked 21 minutes ago -
Write a C – program that calls a user-defined function from
within main() that determines the...
asked 24 minutes ago -
For a 2-Level design, with 8 factors, a recommended screening
design model is:
a. Taguchi L12...
asked 1 hour ago -
1. Define a function in python that returns the sum of the
following 4 lists. Remember...
asked 56 minutes ago -
Elspeth, associate research specialist for a marketing research
firm in a large Midwestern city, had just...
asked 55 minutes ago