
Homework Answers
Summary - it is basic problem so I have shown that step by step guide for it
Pls rate it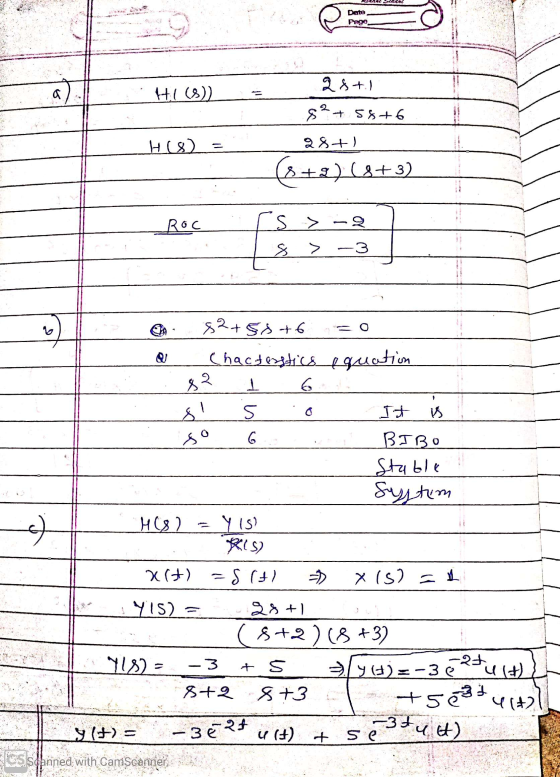
Add Answer to:
= 2s +1 Consider the continuous-time LTI causal system with Transfer function H(s) $? + 5s...
р Question 3 Consider the transfer function, H(s), of a non-causal LTI system H(S) = s+2...
 р Question 3 Consider the transfer function, H(s), of a non-causal LTI system H(S) = s+2 (8+3)(82 +8+5) (82–8+5) 1. Determine ROC for H(s) = = = xx, E P T
р Question 3 Consider the transfer function, H(s), of a non-causal LTI system H(S) = s+2 (8+3)(82 +8+5) (82–8+5) 1. Determine ROC for H(s) = = = xx, E P T
a continuous time causal LTI system has a transfer function: H(s)=(s+3)/(s^2 +3s +2) a) find the...
a continuous time causal LTI system has a transfer function: H(s)=(s+3)/(s^2 +3s +2) a) find the poles and zeros b) indicate the poles and the zeros on the s-plane indicate the region of convergence (ROC) c) write the differential equation of the system. d) determine the gain of the system at dc (ie the transfer function at w=0) e) is the system described by H(s) stable? explain f) for the system described by H(s), does the Fourier transform H(jw) exist?...
Help me do this problem step by step LSM1 Problem (50 pts) Consider a causal continuous-time...
 Help me do this problem step by step
LSM1 Problem (50 pts) Consider a causal continuous-time LTI system with input-output relationship dt+)t). (a) Find the transfer function H(s) of the system and specify its ROC. (b) Find the impulse response h(t) of the system. (12 pts) (12 pts) (c) Using the convolution property of the Laplace transform, find the output y(t) of the system in response to the input (t)ut) e2-u(t 1 (26 pts)
Help me do this problem step by step
LSM1 Problem (50 pts) Consider a causal continuous-time LTI system with input-output relationship dt+)t). (a) Find the transfer function H(s) of the system and specify its ROC. (b) Find the impulse response h(t) of the system. (12 pts) (12 pts) (c) Using the convolution property of the Laplace transform, find the output y(t) of the system in response to the input (t)ut) e2-u(t 1 (26 pts)
Question 1 (10 pts): Consider the continuous-time LTI system S whose unit impulse response h is given by Le., h consists of a unit impulse at time 0 followed by a unit impulse at time (a) (2pts)...
 Question 1 (10 pts): Consider the continuous-time LTI system S whose unit impulse response h is given by Le., h consists of a unit impulse at time 0 followed by a unit impulse at time (a) (2pts) Obtain and plot the unit step response of S. (b) (2pts) Is S stable? Is it causal? Explain Two unrelated questions (c) (2pts) Is the ideal low-pass continuous-time filter (frequency response H(w) for H()0 otherwise) causal? Explain (d) (4 pts) Is the discrete-time...
Question 1 (10 pts): Consider the continuous-time LTI system S whose unit impulse response h is given by Le., h consists of a unit impulse at time 0 followed by a unit impulse at time (a) (2pts) Obtain and plot the unit step response of S. (b) (2pts) Is S stable? Is it causal? Explain Two unrelated questions (c) (2pts) Is the ideal low-pass continuous-time filter (frequency response H(w) for H()0 otherwise) causal? Explain (d) (4 pts) Is the discrete-time...
5. Consider an LTI system with transfer function H(s). Pole-zero plot of H(s) is shown below....
 5. Consider an LTI system with transfer function H(s). Pole-zero plot of H(s) is shown below. Im (a) How many ROCs can be considered for this system? (b) Assume system is causal. Find ROC of H(S) (c) Assume y(t) is system output with step unit as input. Given lim y(t) = 5 , 00 Find H(s).
5. Consider an LTI system with transfer function H(s). Pole-zero plot of H(s) is shown below. Im (a) How many ROCs can be considered for this system? (b) Assume system is causal. Find ROC of H(S) (c) Assume y(t) is system output with step unit as input. Given lim y(t) = 5 , 00 Find H(s).
A continuous-time LTI system has unit impulse response h(t). The Laplace transform of h(t), also called...
 A continuous-time LTI system has unit impulse response h(t). The
Laplace transform of h(t), also called the “transfer function” of
the LTI system, is
.
For each of the following cases, determine the region of
convergence (ROC) for H(s) and the corresponding h(t), and
determine whether the Fourier transform of h(t) exists.
(a) The LTI system is causal but not stable.
(b) The LTI system is stable but not causal.
(c) The LTI system is neither stable nor causal
8...
A continuous-time LTI system has unit impulse response h(t). The
Laplace transform of h(t), also called the “transfer function” of
the LTI system, is
.
For each of the following cases, determine the region of
convergence (ROC) for H(s) and the corresponding h(t), and
determine whether the Fourier transform of h(t) exists.
(a) The LTI system is causal but not stable.
(b) The LTI system is stable but not causal.
(c) The LTI system is neither stable nor causal
8...
3. Consider an LTI system with transfer function H(s). Pole-zero plot of H(s) is shown below....
 3. Consider an LTI system with transfer function H(s). Pole-zero plot of H(s) is shown below. Im O--- Re (a) How many ROCs can be considered for this system? (b) Assume system is causal. Find ROC of H(S) (c) Assume y(t) is system output with step unit as input. Given lim yết) = 5 , Find H(s). (d) (optional) Find y(2) (y(t) for t = 2).
3. Consider an LTI system with transfer function H(s). Pole-zero plot of H(s) is shown below. Im O--- Re (a) How many ROCs can be considered for this system? (b) Assume system is causal. Find ROC of H(S) (c) Assume y(t) is system output with step unit as input. Given lim yết) = 5 , Find H(s). (d) (optional) Find y(2) (y(t) for t = 2).
2.6.1 Consider a causal continuous-time LTI system described by the differential equation u"(t) +...
 2.6.1-2.6.62.6.1 Consider a causal contimuous-time LTI system described by the differential equation$$ y^{\prime \prime}(t)+y(t)=x(t) $$(a) Find the transfer function \(H(s)\), its \(R O C\), and its poles.(b) Find the impulse response \(h(t)\).(c) Classify the system as stable/unstable.(d) Find the step response of the system.2.6.2 Given the impulse response of a continuous-time LTI system, find the transfer function \(H(s),\) the \(\mathrm{ROC}\) of \(H(s)\), and the poles of the system. Also find the differential equation describing each system.(a) \(h(t)=\sin (3 t) u(t)\)(b)...
2.6.1-2.6.62.6.1 Consider a causal contimuous-time LTI system described by the differential equation$$ y^{\prime \prime}(t)+y(t)=x(t) $$(a) Find the transfer function \(H(s)\), its \(R O C\), and its poles.(b) Find the impulse response \(h(t)\).(c) Classify the system as stable/unstable.(d) Find the step response of the system.2.6.2 Given the impulse response of a continuous-time LTI system, find the transfer function \(H(s),\) the \(\mathrm{ROC}\) of \(H(s)\), and the poles of the system. Also find the differential equation describing each system.(a) \(h(t)=\sin (3 t) u(t)\)(b)...
Consider an LTI system for which the system (transfer) function H(s) has a zero at s=2...
Consider an LTI system for which the system (transfer) function H(s) has a zero at s=2 and poles at s=-12, -7, -6. If the system is known to be causal and stable, choose the ROC associated with the given system function. *
LTI Systems-Stability Consider an LTI system with system function: s-1 H (s) = If the system...
 LTI Systems-Stability Consider an LTI system with system function: s-1 H (s) = If the system is non-causal and un-stable, determine the time domain impulse response
LTI Systems-Stability Consider an LTI system with system function: s-1 H (s) = If the system is non-causal and un-stable, determine the time domain impulse response
 р Question 3 Consider the transfer function, H(s), of a non-causal LTI system H(S) = s+2 (8+3)(82 +8+5) (82–8+5) 1. Determine ROC for H(s) = = = xx, E P T
р Question 3 Consider the transfer function, H(s), of a non-causal LTI system H(S) = s+2 (8+3)(82 +8+5) (82–8+5) 1. Determine ROC for H(s) = = = xx, E P T
 Help me do this problem step by step
LSM1 Problem (50 pts) Consider a causal continuous-time LTI system with input-output relationship dt+)t). (a) Find the transfer function H(s) of the system and specify its ROC. (b) Find the impulse response h(t) of the system. (12 pts) (12 pts) (c) Using the convolution property of the Laplace transform, find the output y(t) of the system in response to the input (t)ut) e2-u(t 1 (26 pts)
Help me do this problem step by step
LSM1 Problem (50 pts) Consider a causal continuous-time LTI system with input-output relationship dt+)t). (a) Find the transfer function H(s) of the system and specify its ROC. (b) Find the impulse response h(t) of the system. (12 pts) (12 pts) (c) Using the convolution property of the Laplace transform, find the output y(t) of the system in response to the input (t)ut) e2-u(t 1 (26 pts)
 Question 1 (10 pts): Consider the continuous-time LTI system S whose unit impulse response h is given by Le., h consists of a unit impulse at time 0 followed by a unit impulse at time (a) (2pts) Obtain and plot the unit step response of S. (b) (2pts) Is S stable? Is it causal? Explain Two unrelated questions (c) (2pts) Is the ideal low-pass continuous-time filter (frequency response H(w) for H()0 otherwise) causal? Explain (d) (4 pts) Is the discrete-time...
Question 1 (10 pts): Consider the continuous-time LTI system S whose unit impulse response h is given by Le., h consists of a unit impulse at time 0 followed by a unit impulse at time (a) (2pts) Obtain and plot the unit step response of S. (b) (2pts) Is S stable? Is it causal? Explain Two unrelated questions (c) (2pts) Is the ideal low-pass continuous-time filter (frequency response H(w) for H()0 otherwise) causal? Explain (d) (4 pts) Is the discrete-time...
 5. Consider an LTI system with transfer function H(s). Pole-zero plot of H(s) is shown below. Im (a) How many ROCs can be considered for this system? (b) Assume system is causal. Find ROC of H(S) (c) Assume y(t) is system output with step unit as input. Given lim y(t) = 5 , 00 Find H(s).
5. Consider an LTI system with transfer function H(s). Pole-zero plot of H(s) is shown below. Im (a) How many ROCs can be considered for this system? (b) Assume system is causal. Find ROC of H(S) (c) Assume y(t) is system output with step unit as input. Given lim y(t) = 5 , 00 Find H(s).
 A continuous-time LTI system has unit impulse response h(t). The
Laplace transform of h(t), also called the “transfer function” of
the LTI system, is
.
For each of the following cases, determine the region of
convergence (ROC) for H(s) and the corresponding h(t), and
determine whether the Fourier transform of h(t) exists.
(a) The LTI system is causal but not stable.
(b) The LTI system is stable but not causal.
(c) The LTI system is neither stable nor causal
8...
A continuous-time LTI system has unit impulse response h(t). The
Laplace transform of h(t), also called the “transfer function” of
the LTI system, is
.
For each of the following cases, determine the region of
convergence (ROC) for H(s) and the corresponding h(t), and
determine whether the Fourier transform of h(t) exists.
(a) The LTI system is causal but not stable.
(b) The LTI system is stable but not causal.
(c) The LTI system is neither stable nor causal
8...
 3. Consider an LTI system with transfer function H(s). Pole-zero plot of H(s) is shown below. Im O--- Re (a) How many ROCs can be considered for this system? (b) Assume system is causal. Find ROC of H(S) (c) Assume y(t) is system output with step unit as input. Given lim yết) = 5 , Find H(s). (d) (optional) Find y(2) (y(t) for t = 2).
3. Consider an LTI system with transfer function H(s). Pole-zero plot of H(s) is shown below. Im O--- Re (a) How many ROCs can be considered for this system? (b) Assume system is causal. Find ROC of H(S) (c) Assume y(t) is system output with step unit as input. Given lim yết) = 5 , Find H(s). (d) (optional) Find y(2) (y(t) for t = 2).
 2.6.1-2.6.62.6.1 Consider a causal contimuous-time LTI system described by the differential equation$$ y^{\prime \prime}(t)+y(t)=x(t) $$(a) Find the transfer function \(H(s)\), its \(R O C\), and its poles.(b) Find the impulse response \(h(t)\).(c) Classify the system as stable/unstable.(d) Find the step response of the system.2.6.2 Given the impulse response of a continuous-time LTI system, find the transfer function \(H(s),\) the \(\mathrm{ROC}\) of \(H(s)\), and the poles of the system. Also find the differential equation describing each system.(a) \(h(t)=\sin (3 t) u(t)\)(b)...
2.6.1-2.6.62.6.1 Consider a causal contimuous-time LTI system described by the differential equation$$ y^{\prime \prime}(t)+y(t)=x(t) $$(a) Find the transfer function \(H(s)\), its \(R O C\), and its poles.(b) Find the impulse response \(h(t)\).(c) Classify the system as stable/unstable.(d) Find the step response of the system.2.6.2 Given the impulse response of a continuous-time LTI system, find the transfer function \(H(s),\) the \(\mathrm{ROC}\) of \(H(s)\), and the poles of the system. Also find the differential equation describing each system.(a) \(h(t)=\sin (3 t) u(t)\)(b)...
 LTI Systems-Stability Consider an LTI system with system function: s-1 H (s) = If the system is non-causal and un-stable, determine the time domain impulse response
LTI Systems-Stability Consider an LTI system with system function: s-1 H (s) = If the system is non-causal and un-stable, determine the time domain impulse response
Most questions answered within 3 hours.
-
A 0.035 mol sample of a weak acid, HA, is dissolved in 437 mL of
water...
asked 7 minutes ago -
a sample of Ar gas has a volume of 6.30 L with an unknown
pressure. the...
asked 8 minutes ago -
The
serum cholesterol levels of a population of kids follow a normal
distribution with mean 155...
asked 28 minutes ago -
han discusses the racist practice of badlands, a bar
in the Castro
district of San Francisco,...
asked 40 minutes ago -
A sample of final exam scores is normally distributed with a
mean equal to 25 and...
asked 43 minutes ago -
An investor shorts 100 shares of a stock when the share price is
$50 and closes...
asked 47 minutes ago -
LLOP corporation just paid 4$ dividend per share, you expect the
dividend to grow 8% for...
asked 56 minutes ago -
if we subtract 1000 from 0001 is there overflow? (binary)
asked 1 hour ago -
Hello, I need help with the function below, The language I am
using is Ocaml
open...
asked 1 hour ago -
Explain how the presence of glucose represses the gal structural
genes?
asked 1 hour ago -
For the reaction CaI2+2AgNO3⟶2AgI+Ca(NO3)2 how many grams of
silver iodide, AgI, are produced from 56.5 g...
asked 1 hour ago -
Write an equation for hydrolysis via acid catalysis.
Using ethyl acetate, ethyl benzoate, ethyl formate or...
asked 1 hour ago