
Homework Answers
Hello,
Please find
the answer attached as under. Please give a thumbs up
rating if you find the answer useful! Have a rocking day
ahead!
NOTE: i have solved the problem in SIMULINK:
First, the following block diagram is constructed:

Now, double click on the PD block and tune the controller:
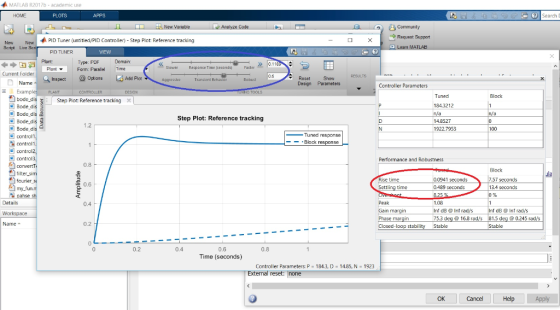
Kp as seen from the tuning table is 184.32
*****************************************************************
PS: Please do not forget the thumbs
up!
Add Answer to:
R(s) C(s) G(s)G(s) Given the simple control loop above and the data below, determine the Kp...
Copy of R(s) G (s) อา G(s) C(s) Given the control loop above, determine the overall gain K for the Gc(s) for a given G(s) and design requirements Peak Time (Tp) 0.2 second Settling time (Ts)-0.12...
 Copy of R(s) G (s) อา G(s) C(s) Given the control loop above, determine the overall gain K for the Gc(s) for a given G(s) and design requirements Peak Time (Tp) 0.2 second Settling time (Ts)-0.12 second Design a Dual PD controller to have two-distinct roots. Assume the angle for (one zero) Z1 60 degreos.
Copy of R(s) G (s) อา G(s) C(s) Given the control loop above, determine the overall gain K for the Gc(s) for a given G(s)...
Copy of R(s) G (s) อา G(s) C(s) Given the control loop above, determine the overall gain K for the Gc(s) for a given G(s) and design requirements Peak Time (Tp) 0.2 second Settling time (Ts)-0.12 second Design a Dual PD controller to have two-distinct roots. Assume the angle for (one zero) Z1 60 degreos.
Copy of R(s) G (s) อา G(s) C(s) Given the control loop above, determine the overall gain K for the Gc(s) for a given G(s)...
Given the control loop above, determine the Kp gain for the Gc(s) for a given G(s) and design requirements. Peak Time (Tp) = 1/2 second Settling time (Ts) = 1 second G(s) = 1/ ( s^2 + 5s + 5.25) Desi...
 Given the control loop above, determine the Kp gain for the
Gc(s) for a given G(s) and design requirements.
Peak Time (Tp) = 1/2 second
Settling time (Ts) = 1 second
G(s) = 1/ ( s^2 + 5s + 5.25)
Design the PID controller to have two-distinct roots. Assume the
angle for (one root) Z1 = 30 degrees.
QUESTION 1 10 points a Answer R(s) C(s) G.(s) G(s) Given the control loop above, determine the Kp gain for the Gcis)...
Given the control loop above, determine the Kp gain for the
Gc(s) for a given G(s) and design requirements.
Peak Time (Tp) = 1/2 second
Settling time (Ts) = 1 second
G(s) = 1/ ( s^2 + 5s + 5.25)
Design the PID controller to have two-distinct roots. Assume the
angle for (one root) Z1 = 30 degrees.
QUESTION 1 10 points a Answer R(s) C(s) G.(s) G(s) Given the control loop above, determine the Kp gain for the Gcis)...
QUESTION 3 Copy of R(s) C(s) G(s) Given the control loop above, determine the overall gain K for the Gc(s) for a given G(s) and design requirements. Peak Time (Tp) 0.2 second Settling time (Ts)-0.12...
 QUESTION 3 Copy of R(s) C(s) G(s) Given the control loop above, determine the overall gain K for the Gc(s) for a given G(s) and design requirements. Peak Time (Tp) 0.2 second Settling time (Ts)-0.12 second G(s) 1/ (s24) Design a Dual PD controller to have two-distinct roots. Assume the angle for (one zero) Z1 60 degrees.
QUESTION 3 Copy of R(s) C(s) G(s) Given the control loop above, determine the overall gain K for the Gc(s) for a given...
QUESTION 3 Copy of R(s) C(s) G(s) Given the control loop above, determine the overall gain K for the Gc(s) for a given G(s) and design requirements. Peak Time (Tp) 0.2 second Settling time (Ts)-0.12 second G(s) 1/ (s24) Design a Dual PD controller to have two-distinct roots. Assume the angle for (one zero) Z1 60 degrees.
QUESTION 3 Copy of R(s) C(s) G(s) Given the control loop above, determine the overall gain K for the Gc(s) for a given...
QUESTION 2 10 points Save Answer R(s) C(s) G(s) Given the control loop above, determine the overall gain K for the Gc(s for a given G(s) and design requirements. Peak Time (Tp) 0.2 second Settling ti...
 QUESTION 2 10 points Save Answer R(s) C(s) G(s) Given the control loop above, determine the overall gain K for the Gc(s for a given G(s) and design requirements. Peak Time (Tp) 0.2 second Settling time (Ts) 0.25 second Design a Dual PD controller to have two-distinct roots. Assume the angle for (one zero) Z1 60 degrees.
QUESTION 2 10 points Save Answer R(s) C(s) G(s) Given the control loop above, determine the overall gain K for the Gc(s for...
QUESTION 2 10 points Save Answer R(s) C(s) G(s) Given the control loop above, determine the overall gain K for the Gc(s for a given G(s) and design requirements. Peak Time (Tp) 0.2 second Settling time (Ts) 0.25 second Design a Dual PD controller to have two-distinct roots. Assume the angle for (one zero) Z1 60 degrees.
QUESTION 2 10 points Save Answer R(s) C(s) G(s) Given the control loop above, determine the overall gain K for the Gc(s for...
Given the control loop above, determine the overall gain K for the Gc(s) for a given G(s) and design requirements. Peak Time (Tp) = 0.2 second Settling time (Ts) = 0.25 second G(s) = 1/ ( s^2 + 10s +...
 Given the control loop above, determine the overall gain K for
the Gc(s) for a given G(s) and design requirements.
Peak Time (Tp) = 0.2 second
Settling time (Ts) = 0.25 second
G(s) = 1/ ( s^2 + 10s + 221)
Design a Dual PD controller to have two-distinct roots. Assume
the angle for (one zero) Z1 = 10 degrees.
R(s) C(s) G(s) G(s) Given the control loop above, determine the overall gain K for the Gc(s) for a given...
Given the control loop above, determine the overall gain K for
the Gc(s) for a given G(s) and design requirements.
Peak Time (Tp) = 0.2 second
Settling time (Ts) = 0.25 second
G(s) = 1/ ( s^2 + 10s + 221)
Design a Dual PD controller to have two-distinct roots. Assume
the angle for (one zero) Z1 = 10 degrees.
R(s) C(s) G(s) G(s) Given the control loop above, determine the overall gain K for the Gc(s) for a given...
QUESTION 3 Copy of R(s) C(s) G(s) G (s) Given the control loop above, determine the overall gain K for the Gc(s) for a given G(s) and design requirements. Peak Time (Tp) = 0.2 second Settling time (T...
 QUESTION 3 Copy of R(s) C(s) G(s) G (s) Given the control loop above, determine the overall gain K for the Gc(s) for a given G(s) and design requirements. Peak Time (Tp) = 0.2 second Settling time (TS) = 0.12 second G(s) = 1/ (s^2 + .1s+4) Design a Dual PD controller to have two-distinct roots. Assume the angle for (one zero) Z1 - 60 degrees.
QUESTION 3 Copy of R(s) C(s) G(s) G (s) Given the control loop above,...
QUESTION 3 Copy of R(s) C(s) G(s) G (s) Given the control loop above, determine the overall gain K for the Gc(s) for a given G(s) and design requirements. Peak Time (Tp) = 0.2 second Settling time (TS) = 0.12 second G(s) = 1/ (s^2 + .1s+4) Design a Dual PD controller to have two-distinct roots. Assume the angle for (one zero) Z1 - 60 degrees.
QUESTION 3 Copy of R(s) C(s) G(s) G (s) Given the control loop above,...
R(s) C(s) G (s) G(s) Given the control loop above, determine the Kd gain for the Gc(s) for a given G(s) and design requirements. Peak Time (Tp) 0.25 second Settling time (Ts) 0.8 second G(s) 1/s211s2...
 R(s) C(s) G (s) G(s) Given the control loop above, determine the Kd gain for the Gc(s) for a given G(s) and design requirements. Peak Time (Tp) 0.25 second Settling time (Ts) 0.8 second G(s) 1/s211s28) Design the PID controller to have two-distinct roots. Assume the angle for (one root) Z1 30 degrees.
R(s) C(s) G (s) G(s) Given the control loop above, determine the Kd gain for the Gc(s) for a given G(s) and design requirements. Peak Time (Tp)...
R(s) C(s) G (s) G(s) Given the control loop above, determine the Kd gain for the Gc(s) for a given G(s) and design requirements. Peak Time (Tp) 0.25 second Settling time (Ts) 0.8 second G(s) 1/s211s28) Design the PID controller to have two-distinct roots. Assume the angle for (one root) Z1 30 degrees.
R(s) C(s) G (s) G(s) Given the control loop above, determine the Kd gain for the Gc(s) for a given G(s) and design requirements. Peak Time (Tp)...
Y(S) Gp(s) Gc(s) R(S) For the given system above, determine the gain K that will give the system desired response below . Settling time of 2 seconds . Peak time of 0.5 seconds . The given plant h...
 Y(S) Gp(s) Gc(s) R(S) For the given system above, determine the gain K that will give the system desired response below . Settling time of 2 seconds . Peak time of 0.5 seconds . The given plant has a transfer function of: Gp - (s +8V( (s +6'(s+4) The controller has a transfer function of: Gc (s+33.7392Vs
Y(S) Gp(s) Gc(s) R(S) For the given system above, determine the gain K that will give the system desired response below . Settling...
Y(S) Gp(s) Gc(s) R(S) For the given system above, determine the gain K that will give the system desired response below . Settling time of 2 seconds . Peak time of 0.5 seconds . The given plant has a transfer function of: Gp - (s +8V( (s +6'(s+4) The controller has a transfer function of: Gc (s+33.7392Vs
Y(S) Gp(s) Gc(s) R(S) For the given system above, determine the gain K that will give the system desired response below . Settling...
Please show all work so I can rate thumbs up. R(s) C(s) G.(s) G(s) Given the...
 Please show all work so I can rate thumbs up.
R(s) C(s) G.(s) G(s) Given the control loop above, determine the Ki gain for the Gc(s) for a given G(s) and design requirements Maximum overshoot-65% Settling Time (Ts)-0.2 seconds G(s) 1/(sA2 - 5s 32) Design the PID controller to have two-distinct roots. Assume the angle for (one root) Z1 45 degrees
Please show all work so I can rate thumbs up.
R(s) C(s) G.(s) G(s) Given the control loop above, determine the Ki gain for the Gc(s) for a given G(s) and design requirements Maximum overshoot-65% Settling Time (Ts)-0.2 seconds G(s) 1/(sA2 - 5s 32) Design the PID controller to have two-distinct roots. Assume the angle for (one root) Z1 45 degrees
PD Controller Design 1 For the closed loop system shown, and given G(s) 35.20 s2+ 0.99 s+ 11.00 Design a PD Controller i.e. where C(s)-Kp + Kds to satisfy the following specifications t 0.03 s...
 PD Controller Design 1 For the closed loop system shown, and given G(s) 35.20 s2+ 0.99 s+ 11.00 Design a PD Controller i.e. where C(s)-Kp + Kds to satisfy the following specifications t 0.03 s ts,1%-020 s K3 of 4 ( Qref Ω0ut C(s) plant control Part A-P Gain ▼ Find the P gain (i.e. Kp ) Submit Previous Answers Request Answer X Incorrect; Try Again Part B- D Gain Find the D gain (i.e. Kd)
PD Controller Design 1...
PD Controller Design 1 For the closed loop system shown, and given G(s) 35.20 s2+ 0.99 s+ 11.00 Design a PD Controller i.e. where C(s)-Kp + Kds to satisfy the following specifications t 0.03 s ts,1%-020 s K3 of 4 ( Qref Ω0ut C(s) plant control Part A-P Gain ▼ Find the P gain (i.e. Kp ) Submit Previous Answers Request Answer X Incorrect; Try Again Part B- D Gain Find the D gain (i.e. Kd)
PD Controller Design 1...
 Copy of R(s) G (s) อา G(s) C(s) Given the control loop above, determine the overall gain K for the Gc(s) for a given G(s) and design requirements Peak Time (Tp) 0.2 second Settling time (Ts)-0.12 second Design a Dual PD controller to have two-distinct roots. Assume the angle for (one zero) Z1 60 degreos.
Copy of R(s) G (s) อา G(s) C(s) Given the control loop above, determine the overall gain K for the Gc(s) for a given G(s)...
Copy of R(s) G (s) อา G(s) C(s) Given the control loop above, determine the overall gain K for the Gc(s) for a given G(s) and design requirements Peak Time (Tp) 0.2 second Settling time (Ts)-0.12 second Design a Dual PD controller to have two-distinct roots. Assume the angle for (one zero) Z1 60 degreos.
Copy of R(s) G (s) อา G(s) C(s) Given the control loop above, determine the overall gain K for the Gc(s) for a given G(s)...
 Given the control loop above, determine the Kp gain for the
Gc(s) for a given G(s) and design requirements.
Peak Time (Tp) = 1/2 second
Settling time (Ts) = 1 second
G(s) = 1/ ( s^2 + 5s + 5.25)
Design the PID controller to have two-distinct roots. Assume the
angle for (one root) Z1 = 30 degrees.
QUESTION 1 10 points a Answer R(s) C(s) G.(s) G(s) Given the control loop above, determine the Kp gain for the Gcis)...
Given the control loop above, determine the Kp gain for the
Gc(s) for a given G(s) and design requirements.
Peak Time (Tp) = 1/2 second
Settling time (Ts) = 1 second
G(s) = 1/ ( s^2 + 5s + 5.25)
Design the PID controller to have two-distinct roots. Assume the
angle for (one root) Z1 = 30 degrees.
QUESTION 1 10 points a Answer R(s) C(s) G.(s) G(s) Given the control loop above, determine the Kp gain for the Gcis)...
 QUESTION 3 Copy of R(s) C(s) G(s) Given the control loop above, determine the overall gain K for the Gc(s) for a given G(s) and design requirements. Peak Time (Tp) 0.2 second Settling time (Ts)-0.12 second G(s) 1/ (s24) Design a Dual PD controller to have two-distinct roots. Assume the angle for (one zero) Z1 60 degrees.
QUESTION 3 Copy of R(s) C(s) G(s) Given the control loop above, determine the overall gain K for the Gc(s) for a given...
QUESTION 3 Copy of R(s) C(s) G(s) Given the control loop above, determine the overall gain K for the Gc(s) for a given G(s) and design requirements. Peak Time (Tp) 0.2 second Settling time (Ts)-0.12 second G(s) 1/ (s24) Design a Dual PD controller to have two-distinct roots. Assume the angle for (one zero) Z1 60 degrees.
QUESTION 3 Copy of R(s) C(s) G(s) Given the control loop above, determine the overall gain K for the Gc(s) for a given...
 QUESTION 2 10 points Save Answer R(s) C(s) G(s) Given the control loop above, determine the overall gain K for the Gc(s for a given G(s) and design requirements. Peak Time (Tp) 0.2 second Settling time (Ts) 0.25 second Design a Dual PD controller to have two-distinct roots. Assume the angle for (one zero) Z1 60 degrees.
QUESTION 2 10 points Save Answer R(s) C(s) G(s) Given the control loop above, determine the overall gain K for the Gc(s for...
QUESTION 2 10 points Save Answer R(s) C(s) G(s) Given the control loop above, determine the overall gain K for the Gc(s for a given G(s) and design requirements. Peak Time (Tp) 0.2 second Settling time (Ts) 0.25 second Design a Dual PD controller to have two-distinct roots. Assume the angle for (one zero) Z1 60 degrees.
QUESTION 2 10 points Save Answer R(s) C(s) G(s) Given the control loop above, determine the overall gain K for the Gc(s for...
 Given the control loop above, determine the overall gain K for
the Gc(s) for a given G(s) and design requirements.
Peak Time (Tp) = 0.2 second
Settling time (Ts) = 0.25 second
G(s) = 1/ ( s^2 + 10s + 221)
Design a Dual PD controller to have two-distinct roots. Assume
the angle for (one zero) Z1 = 10 degrees.
R(s) C(s) G(s) G(s) Given the control loop above, determine the overall gain K for the Gc(s) for a given...
Given the control loop above, determine the overall gain K for
the Gc(s) for a given G(s) and design requirements.
Peak Time (Tp) = 0.2 second
Settling time (Ts) = 0.25 second
G(s) = 1/ ( s^2 + 10s + 221)
Design a Dual PD controller to have two-distinct roots. Assume
the angle for (one zero) Z1 = 10 degrees.
R(s) C(s) G(s) G(s) Given the control loop above, determine the overall gain K for the Gc(s) for a given...
 QUESTION 3 Copy of R(s) C(s) G(s) G (s) Given the control loop above, determine the overall gain K for the Gc(s) for a given G(s) and design requirements. Peak Time (Tp) = 0.2 second Settling time (TS) = 0.12 second G(s) = 1/ (s^2 + .1s+4) Design a Dual PD controller to have two-distinct roots. Assume the angle for (one zero) Z1 - 60 degrees.
QUESTION 3 Copy of R(s) C(s) G(s) G (s) Given the control loop above,...
QUESTION 3 Copy of R(s) C(s) G(s) G (s) Given the control loop above, determine the overall gain K for the Gc(s) for a given G(s) and design requirements. Peak Time (Tp) = 0.2 second Settling time (TS) = 0.12 second G(s) = 1/ (s^2 + .1s+4) Design a Dual PD controller to have two-distinct roots. Assume the angle for (one zero) Z1 - 60 degrees.
QUESTION 3 Copy of R(s) C(s) G(s) G (s) Given the control loop above,...
 R(s) C(s) G (s) G(s) Given the control loop above, determine the Kd gain for the Gc(s) for a given G(s) and design requirements. Peak Time (Tp) 0.25 second Settling time (Ts) 0.8 second G(s) 1/s211s28) Design the PID controller to have two-distinct roots. Assume the angle for (one root) Z1 30 degrees.
R(s) C(s) G (s) G(s) Given the control loop above, determine the Kd gain for the Gc(s) for a given G(s) and design requirements. Peak Time (Tp)...
R(s) C(s) G (s) G(s) Given the control loop above, determine the Kd gain for the Gc(s) for a given G(s) and design requirements. Peak Time (Tp) 0.25 second Settling time (Ts) 0.8 second G(s) 1/s211s28) Design the PID controller to have two-distinct roots. Assume the angle for (one root) Z1 30 degrees.
R(s) C(s) G (s) G(s) Given the control loop above, determine the Kd gain for the Gc(s) for a given G(s) and design requirements. Peak Time (Tp)...
 Y(S) Gp(s) Gc(s) R(S) For the given system above, determine the gain K that will give the system desired response below . Settling time of 2 seconds . Peak time of 0.5 seconds . The given plant has a transfer function of: Gp - (s +8V( (s +6'(s+4) The controller has a transfer function of: Gc (s+33.7392Vs
Y(S) Gp(s) Gc(s) R(S) For the given system above, determine the gain K that will give the system desired response below . Settling...
Y(S) Gp(s) Gc(s) R(S) For the given system above, determine the gain K that will give the system desired response below . Settling time of 2 seconds . Peak time of 0.5 seconds . The given plant has a transfer function of: Gp - (s +8V( (s +6'(s+4) The controller has a transfer function of: Gc (s+33.7392Vs
Y(S) Gp(s) Gc(s) R(S) For the given system above, determine the gain K that will give the system desired response below . Settling...
 Please show all work so I can rate thumbs up.
R(s) C(s) G.(s) G(s) Given the control loop above, determine the Ki gain for the Gc(s) for a given G(s) and design requirements Maximum overshoot-65% Settling Time (Ts)-0.2 seconds G(s) 1/(sA2 - 5s 32) Design the PID controller to have two-distinct roots. Assume the angle for (one root) Z1 45 degrees
Please show all work so I can rate thumbs up.
R(s) C(s) G.(s) G(s) Given the control loop above, determine the Ki gain for the Gc(s) for a given G(s) and design requirements Maximum overshoot-65% Settling Time (Ts)-0.2 seconds G(s) 1/(sA2 - 5s 32) Design the PID controller to have two-distinct roots. Assume the angle for (one root) Z1 45 degrees
 PD Controller Design 1 For the closed loop system shown, and given G(s) 35.20 s2+ 0.99 s+ 11.00 Design a PD Controller i.e. where C(s)-Kp + Kds to satisfy the following specifications t 0.03 s ts,1%-020 s K3 of 4 ( Qref Ω0ut C(s) plant control Part A-P Gain ▼ Find the P gain (i.e. Kp ) Submit Previous Answers Request Answer X Incorrect; Try Again Part B- D Gain Find the D gain (i.e. Kd)
PD Controller Design 1...
PD Controller Design 1 For the closed loop system shown, and given G(s) 35.20 s2+ 0.99 s+ 11.00 Design a PD Controller i.e. where C(s)-Kp + Kds to satisfy the following specifications t 0.03 s ts,1%-020 s K3 of 4 ( Qref Ω0ut C(s) plant control Part A-P Gain ▼ Find the P gain (i.e. Kp ) Submit Previous Answers Request Answer X Incorrect; Try Again Part B- D Gain Find the D gain (i.e. Kd)
PD Controller Design 1...
Most questions answered within 3 hours.
-
3) What are the typical social structures in a global city?
asked 2 hours ago -
Luther Corporation
Consolidated Balance Sheet
December 31, 2019 and 2018 (in $ millions)
Assets
2019
2018...
asked 2 hours ago -
(Expected rate of return and risk) Carter Inc. is evaluating a
security. Calculate the investment’s expected...
asked 4 hours ago -
What specific indicators can point to lack of progress for
African Americans in American society?
asked 5 hours ago -
1-The Electrons in a beam are moving at 2.7×108 m/s in an
electric field of 15000...
asked 6 hours ago -
A gas tank is a vertical cylinder. It has a radius of 1m, a
height of...
asked 6 hours ago -
Accent Software faces the following conditions. All of these
support Accent’s use of a market-penetration pricing...
asked 7 hours ago -
A mathematically inclined friend emails you the following
instructions: "Meet me in the cafeteria the first...
asked 7 hours ago -
A monopoly sells in two countries . The demand curves in the two
countries are p1...
asked 8 hours ago -
A .15kg rubber ball is bounced off a wall. Before hitting the
wall, the ball moves...
asked 9 hours ago -
A manufacturing company preparing to build a new plant is
considering three potential locations for it....
asked 9 hours ago -
B. If compound Y has approximately the same values of solubility
in toluene as compound X,...
asked 9 hours ago