The single degree of freedom model of a vehicle shown below will
be used to obtain a first
approximation of the dynamic behavior of the entire vehicle. The
mass m of the vehicle is
1200 kg when fully loaded and 400 kg when empty. The spring
constant k is 400 kN/m and
the damping ratio ζf is 0.4 when the vehicle is fully
loaded. The vehicle is traveling at 100
km/h over a road whose surface has a sinusoidally varying roughness
with a spatial period
of 4.0 m. We also make the following assumptions about the behavior
of the vehicle:
- As the vehicle moves forward at constant speed, only the
vertical motion u(t) is relevant to the analysis.
- The tire is infinitely stiff, i.e., z(t) represents the
motion of the axle of the vehicle.
- The tire remains in contact with the road.
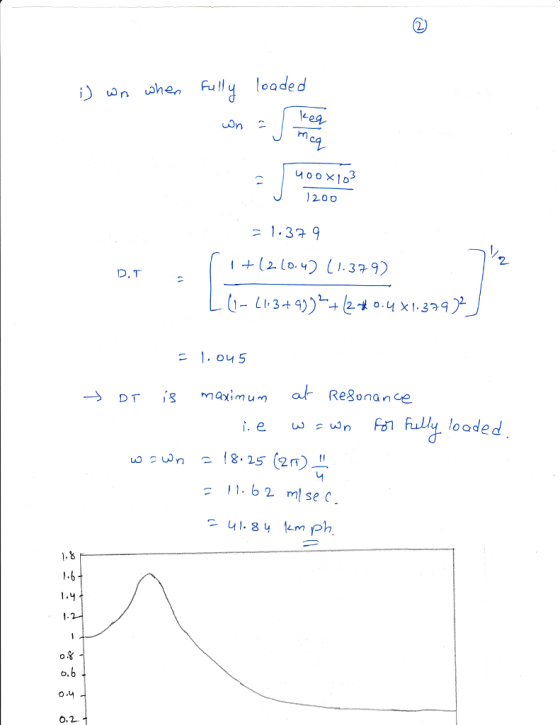
• Compute (Using Matlab) the steady-state
displacement transmissibility (DT) for the vehicle when it is:
1) fully loaded, and
2) empty, and plot the DT vs. r curves for both
together.
• Estimate the vehicle velocity at which the DT (fully loaded)
would be maximum.

Homework Answers
Add Answer to:
The single degree of freedom model of a vehicle shown below will
be used to obtain...
Q5: Fig. Q5 is a simplified model of car (Quarter car model). It is assumed that (1) the vehicle is constrained to one degree of freedom in the vertical direction, (2) the spring constant of the tire...
 Q5: Fig. Q5 is a simplified model of car (Quarter car model). It is assumed that (1) the vehicle is constrained to one degree of freedom in the vertical direction, (2) the spring constant of the tires is infinite, that is, the road roughness is transmitted directly to the suspension system of the vehicle, and (3) the tires do not leave the road surface. Assume a trailer has 1,o00 kg mass fully loaded and 250 kg empty. The spring of...
Q5: Fig. Q5 is a simplified model of car (Quarter car model). It is assumed that (1) the vehicle is constrained to one degree of freedom in the vertical direction, (2) the spring constant of the tires is infinite, that is, the road roughness is transmitted directly to the suspension system of the vehicle, and (3) the tires do not leave the road surface. Assume a trailer has 1,o00 kg mass fully loaded and 250 kg empty. The spring of...
4.16 For the vehicle and "sinusoidal" road shown in Fig. 1 of Example 4.3, the following...
 4.16 For the vehicle and "sinusoidal" road shown in Fig. 1 of Example 4.3, the following parameters are given (f full; empty): e> Wf 3860 lb, W. 2680 lb, k 2000 lb/in., = 0.2, 10 ft/cycle L = Determine the speed of the vehicle in miles per hour that would produce a resonance condition (a) if the vehicle were empty, and (b) if the vehicle were fully loaded. m k/2 z(t) 1 cycle over sinusoidally rough road. Figure 1 SDOF...
4.16 For the vehicle and "sinusoidal" road shown in Fig. 1 of Example 4.3, the following parameters are given (f full; empty): e> Wf 3860 lb, W. 2680 lb, k 2000 lb/in., = 0.2, 10 ft/cycle L = Determine the speed of the vehicle in miles per hour that would produce a resonance condition (a) if the vehicle were empty, and (b) if the vehicle were fully loaded. m k/2 z(t) 1 cycle over sinusoidally rough road. Figure 1 SDOF...
QUESTION 13 Q8 (d): A motor vehicle and its simple mathematical model that can vibrate in the vertical direction while traveling over a rough road is shown in Figure (below). The vehicle can be i...
 QUESTION 13 Q8 (d): A motor vehicle and its simple mathematical model that can vibrate in the vertical direction while traveling over a rough road is shown in Figure (below). The vehicle can be idealized as the spring-mass-damper system. The road surface varies sinusoidally and can be described asy()-r sin ot The vehicle has a mass of m kg. The suspension system has a spring constant of k N/m and a damping ratio of ζ 0.15 ta) For the above...
QUESTION 13 Q8 (d): A motor vehicle and its simple mathematical model that can vibrate in the vertical direction while traveling over a rough road is shown in Figure (below). The vehicle can be idealized as the spring-mass-damper system. The road surface varies sinusoidally and can be described asy()-r sin ot The vehicle has a mass of m kg. The suspension system has a spring constant of k N/m and a damping ratio of ζ 0.15 ta) For the above...
Model for Evaluation The model used for evaluation is the single degree of freedom lumped mass mo...
 Model for Evaluation The model used for evaluation is the single degree of freedom lumped mass model defined by second order differential equation with constant coefficients. This model is shown in Figure 1. x(t)m m f(t) Figure 1 - Single Degree of Freedom Model The equation of motion describing this system can easily be shown to be md-x + cdx + kx = f(t) dt dt where m is the mass, c is the damping and k is the stiffness...
Model for Evaluation The model used for evaluation is the single degree of freedom lumped mass model defined by second order differential equation with constant coefficients. This model is shown in Figure 1. x(t)m m f(t) Figure 1 - Single Degree of Freedom Model The equation of motion describing this system can easily be shown to be md-x + cdx + kx = f(t) dt dt where m is the mass, c is the damping and k is the stiffness...
Consider a single degree of freedom (SDOF) with mass-spring-damper system
 Consider a single degree of freedom (SDOF) with mass-spring-damper system subjected to harmonic excitation having the following characteristics: Mass, m = 850 kg; stiffness, k = 80 kN/m; damping constant, c = 2000 N.s/m, forcing function amplitude, f0 = 5 N; forcing frequency, ωt = 30 rad/s. (a) Calculate the steady-state response of the system and state whether the system is underdamped, critically damped, or overdamped. (b) What happen to the steady-state response when the damping is increased to 18000 N.s/m? (Hint: Determine...
Consider a single degree of freedom (SDOF) with mass-spring-damper system subjected to harmonic excitation having the following characteristics: Mass, m = 850 kg; stiffness, k = 80 kN/m; damping constant, c = 2000 N.s/m, forcing function amplitude, f0 = 5 N; forcing frequency, ωt = 30 rad/s. (a) Calculate the steady-state response of the system and state whether the system is underdamped, critically damped, or overdamped. (b) What happen to the steady-state response when the damping is increased to 18000 N.s/m? (Hint: Determine...
Consider the DC motor-driven wheeled mobile robot shown in figure, in which m is the mass...
Consider the DC motor-driven wheeled mobile robot shown in figure, in which m is the mass of the wheeled mobile robot, r is the radius of the driving wheel, and T is the torque delivered to the wheeled mobile robot by the DC motor. For simplicity, the motion is restricted to one spatial dimension. The figure also shows the simplified drive system, including the equivalent electrical circuit of the DC motor, the gears, and the driving wheel. The motor parameter...
For the mechanical system shown below find the input-output equation relating xolt) to the displacement input...
 For the mechanical system shown below find the input-output equation relating xolt) to the displacement input x(t) 1. ド ド Ki Derive the transfer function X,G)/X, (s)of the mechanical system shown below. The displacements x, and xo are measured from their respective equilibrium potions. Is the system a first-order system if so, what is the time constant? 2. k1 bz k2 3. Consider the mechanical system shown below. The system is initially at rest. The displacements x, and x2 are...
For the mechanical system shown below find the input-output equation relating xolt) to the displacement input x(t) 1. ド ド Ki Derive the transfer function X,G)/X, (s)of the mechanical system shown below. The displacements x, and xo are measured from their respective equilibrium potions. Is the system a first-order system if so, what is the time constant? 2. k1 bz k2 3. Consider the mechanical system shown below. The system is initially at rest. The displacements x, and x2 are...
 Q5: Fig. Q5 is a simplified model of car (Quarter car model). It is assumed that (1) the vehicle is constrained to one degree of freedom in the vertical direction, (2) the spring constant of the tires is infinite, that is, the road roughness is transmitted directly to the suspension system of the vehicle, and (3) the tires do not leave the road surface. Assume a trailer has 1,o00 kg mass fully loaded and 250 kg empty. The spring of...
Q5: Fig. Q5 is a simplified model of car (Quarter car model). It is assumed that (1) the vehicle is constrained to one degree of freedom in the vertical direction, (2) the spring constant of the tires is infinite, that is, the road roughness is transmitted directly to the suspension system of the vehicle, and (3) the tires do not leave the road surface. Assume a trailer has 1,o00 kg mass fully loaded and 250 kg empty. The spring of...
 4.16 For the vehicle and "sinusoidal" road shown in Fig. 1 of Example 4.3, the following parameters are given (f full; empty): e> Wf 3860 lb, W. 2680 lb, k 2000 lb/in., = 0.2, 10 ft/cycle L = Determine the speed of the vehicle in miles per hour that would produce a resonance condition (a) if the vehicle were empty, and (b) if the vehicle were fully loaded. m k/2 z(t) 1 cycle over sinusoidally rough road. Figure 1 SDOF...
4.16 For the vehicle and "sinusoidal" road shown in Fig. 1 of Example 4.3, the following parameters are given (f full; empty): e> Wf 3860 lb, W. 2680 lb, k 2000 lb/in., = 0.2, 10 ft/cycle L = Determine the speed of the vehicle in miles per hour that would produce a resonance condition (a) if the vehicle were empty, and (b) if the vehicle were fully loaded. m k/2 z(t) 1 cycle over sinusoidally rough road. Figure 1 SDOF...
 QUESTION 13 Q8 (d): A motor vehicle and its simple mathematical model that can vibrate in the vertical direction while traveling over a rough road is shown in Figure (below). The vehicle can be idealized as the spring-mass-damper system. The road surface varies sinusoidally and can be described asy()-r sin ot The vehicle has a mass of m kg. The suspension system has a spring constant of k N/m and a damping ratio of ζ 0.15 ta) For the above...
QUESTION 13 Q8 (d): A motor vehicle and its simple mathematical model that can vibrate in the vertical direction while traveling over a rough road is shown in Figure (below). The vehicle can be idealized as the spring-mass-damper system. The road surface varies sinusoidally and can be described asy()-r sin ot The vehicle has a mass of m kg. The suspension system has a spring constant of k N/m and a damping ratio of ζ 0.15 ta) For the above...
 Model for Evaluation The model used for evaluation is the single degree of freedom lumped mass model defined by second order differential equation with constant coefficients. This model is shown in Figure 1. x(t)m m f(t) Figure 1 - Single Degree of Freedom Model The equation of motion describing this system can easily be shown to be md-x + cdx + kx = f(t) dt dt where m is the mass, c is the damping and k is the stiffness...
Model for Evaluation The model used for evaluation is the single degree of freedom lumped mass model defined by second order differential equation with constant coefficients. This model is shown in Figure 1. x(t)m m f(t) Figure 1 - Single Degree of Freedom Model The equation of motion describing this system can easily be shown to be md-x + cdx + kx = f(t) dt dt where m is the mass, c is the damping and k is the stiffness...
 For the mechanical system shown below find the input-output equation relating xolt) to the displacement input x(t) 1. ド ド Ki Derive the transfer function X,G)/X, (s)of the mechanical system shown below. The displacements x, and xo are measured from their respective equilibrium potions. Is the system a first-order system if so, what is the time constant? 2. k1 bz k2 3. Consider the mechanical system shown below. The system is initially at rest. The displacements x, and x2 are...
For the mechanical system shown below find the input-output equation relating xolt) to the displacement input x(t) 1. ド ド Ki Derive the transfer function X,G)/X, (s)of the mechanical system shown below. The displacements x, and xo are measured from their respective equilibrium potions. Is the system a first-order system if so, what is the time constant? 2. k1 bz k2 3. Consider the mechanical system shown below. The system is initially at rest. The displacements x, and x2 are...
Most questions answered within 3 hours.
-
IP address for Device-A is: 172.255.17.30/21 and Device-B is:
172.255.31.30/21. Are these devices on the same...
asked 9 seconds from now -
Using Atmel Studio Assembler, Write a subroutine to multiply two
unsigned 16-bit integers 0x3732 and 0x4148...
asked 3 minutes ago -
Suppose 0.756g of barium nitrate is dissolved in 200.mL of a
26.0mM aqueous solution of ammonium...
asked 4 minutes ago -
You hypothesize that students in fraternities/sororities on your
campus are more extroverted (on an introversion/extroversion scale)...
asked 3 minutes ago -
Perform encryption and decryption using RSA algorithm for the
following
P= 5; q = 11, M=...
asked 22 minutes ago -
The mass Tris base for 100mL of a 0.1M solution is
121.1g . Use the Henderson-Hasselbalch...
asked 14 minutes ago -
Given the following data from Swamp & Sand Industries,
calculate the NI. The tax rate is...
asked 18 minutes ago -
Suppose we mix 1 mole each of Cl2(g) and Cl(g) at 298K, 1 bar.
Which way...
asked 15 minutes ago -
How
many 14 AWG THW conductors are permitted in a 3 in x 2 in x...
asked 20 minutes ago -
1. Summarize"Soils of the Tropics and the World Food Crisis" the
article in a paragraph, making...
asked 20 minutes ago -
Say that you are looking to build a structure (home or something
else of interest) on...
asked 20 minutes ago -
1(a). Draw both chair conformations of
trans-1-chloro-2-methylcyclohexane. Compare stabilities. (b) .Draw
both chair conformations of cis-1-...
asked 31 minutes ago