
Homework Answers
Add Answer to:
Textbook Problem 3-13 Solve the inverse position kinematics for the cylindrical manipulator of Figure 3.34. Figure...
MATLAB EXERCISE4 This exercise focuses on the inverse-pose kinematics solution for the planar 3-DOF 3R robot...
 MATLAB EXERCISE4 This exercise focuses on the inverse-pose kinematics solution for the planar 3-DOF 3R robot (see Figures 3.6 and 3.7; the DH parameters are given in Figure 3.8). The following fixed-length parameters are given: L-4, L-3, and L3 2(m). a) Analytically derive, by hand, the inverse-pose solution for this robot: Given QT calculate all possible multiple solutions for (01 62 63]. (Three methods are pre- sented in the text-choose one of these.) Hint: To simplify the equations, first cal-...
MATLAB EXERCISE4 This exercise focuses on the inverse-pose kinematics solution for the planar 3-DOF 3R robot (see Figures 3.6 and 3.7; the DH parameters are given in Figure 3.8). The following fixed-length parameters are given: L-4, L-3, and L3 2(m). a) Analytically derive, by hand, the inverse-pose solution for this robot: Given QT calculate all possible multiple solutions for (01 62 63]. (Three methods are pre- sented in the text-choose one of these.) Hint: To simplify the equations, first cal-...
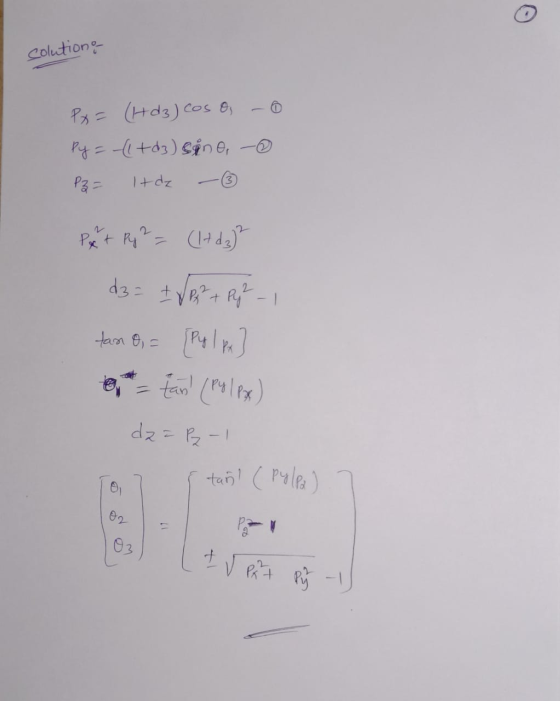
2. Consider the 3-DOF robot configuration in the following figure. Using inverse kinematics, solve for (30 marks) 01.02 and 83, if the position and orientation of point P is given by: 0-1 P=10 Y2...
 2. Consider the 3-DOF robot configuration in the following figure. Using inverse kinematics, solve for (30 marks) 01.02 and 83, if the position and orientation of point P is given by: 0-1 P=10 Y2 Yor Y
2. Consider the 3-DOF robot configuration in the following figure. Using inverse kinematics, solve for (30 marks) 01.02 and 83, if the position and orientation of point P is given by: 0-1 P=10 Y2 Yor Y
2. Consider the 3-DOF robot configuration in the following figure. Using inverse kinematics, solve for (30 marks) 01.02 and 83, if the position and orientation of point P is given by: 0-1 P=10 Y2 Yor Y
2. Consider the 3-DOF robot configuration in the following figure. Using inverse kinematics, solve for (30 marks) 01.02 and 83, if the position and orientation of point P is given by: 0-1 P=10 Y2 Yor Y
3-5 Consider the three-link planar manipulator of Figure 3.26. Derive the forward kinematic equations using the...
 3-5 Consider the three-link planar manipulator of Figure 3.26. Derive the forward kinematic equations using the DH convention. Figure 3.26: Three-link planar arm with prismatic joint of Problem 3-5.
3-5 Consider the three-link planar manipulator of Figure 3.26. Derive the forward kinematic equations using the DH convention. Figure 3.26: Three-link planar arm with prismatic joint of Problem 3-5.
Can you solve this question for me? Link1=0.5 Link2=0.5 Link3=0.55 Link4=0.07 Deliverables: ReportDemonstration of the simulation...
 Can you solve this question for me?
Link1=0.5
Link2=0.5
Link3=0.55
Link4=0.07
Deliverables: ReportDemonstration of the simulation For a 6 DOF industrial manipulator, which consists of a spherical wrist on top of an antropomorphic robot as shown in the figure 1. Draw the robot, place the coordinate axes of the robot and fill its Denavit elro wrist centre 45 Hartenberg variables table Find the homogenous matrix of the robot for its forward kinematics solution. Find the equations of the joint variables...
Can you solve this question for me?
Link1=0.5
Link2=0.5
Link3=0.55
Link4=0.07
Deliverables: ReportDemonstration of the simulation For a 6 DOF industrial manipulator, which consists of a spherical wrist on top of an antropomorphic robot as shown in the figure 1. Draw the robot, place the coordinate axes of the robot and fill its Denavit elro wrist centre 45 Hartenberg variables table Find the homogenous matrix of the robot for its forward kinematics solution. Find the equations of the joint variables...
All questions refer to Figure 1 (a) Construct Cartesian coordinate frame for every robot joints (3 marks, C3) (b...
 All questions refer to Figure 1 (a) Construct Cartesian coordinate frame for every robot joints (3 marks, C3) (b) Calculate Denavit Harternberg Link-Arm Parameter for every robot joints by filing table below o, joint-angle | dioffset distance l ai arm length cri twist angle joint (3 marks, C3) (d) Calculate end effector position (Px, Py, Pz) or forward kinematic. (5 marks, C3) Solve the problem of inverse kinematic for finding positioning joints or the first two joints (e) (e,) and...
All questions refer to Figure 1 (a) Construct Cartesian coordinate frame for every robot joints (3 marks, C3) (b) Calculate Denavit Harternberg Link-Arm Parameter for every robot joints by filing table below o, joint-angle | dioffset distance l ai arm length cri twist angle joint (3 marks, C3) (d) Calculate end effector position (Px, Py, Pz) or forward kinematic. (5 marks, C3) Solve the problem of inverse kinematic for finding positioning joints or the first two joints (e) (e,) and...
KHW#3 Problem 3.34 8 of 15 Part A Earh coed an sustain a maximum tension ofl 25 lb. (Figure 1) Determine the largest we...
 KHW#3 Problem 3.34 8 of 15 Part A Earh coed an sustain a maximum tension ofl 25 lb. (Figure 1) Determine the largest weight af the lamp that can be supported. Express vour answer to three significant tiqures and include the appronriate units. ? Units Value и H t Ans Subrit Part B Delemine of ced DC for equlbium Eщpя уон апкин икіп thини ніцniсant fiuннк. Figure 1 ol 1. AEit 0: Bequest AnswI Submit Provide Feedback Next
KHW#3 Problem...
KHW#3 Problem 3.34 8 of 15 Part A Earh coed an sustain a maximum tension ofl 25 lb. (Figure 1) Determine the largest weight af the lamp that can be supported. Express vour answer to three significant tiqures and include the appronriate units. ? Units Value и H t Ans Subrit Part B Delemine of ced DC for equlbium Eщpя уон апкин икіп thини ніцniсant fiuннк. Figure 1 ol 1. AEit 0: Bequest AnswI Submit Provide Feedback Next
KHW#3 Problem...
(1 point) In this problem you will solve the nonhomogeneous system -3 5]- -5 3 y t A. Write a fundamental matrix for the associated homogeneous system B. Compute the inverse C. Multiply by g and inte...
 (1 point) In this problem you will solve the nonhomogeneous system -3 5]- -5 3 y t A. Write a fundamental matrix for the associated homogeneous system B. Compute the inverse C. Multiply by g and integrate tci (Do not include c1 and c2 in your answers). D. Give the solution to the systenm C + (Do not include ci and c2 in your answers).
(1 point) In this problem you will solve the nonhomogeneous system -3 5]- -5 3...
(1 point) In this problem you will solve the nonhomogeneous system -3 5]- -5 3 y t A. Write a fundamental matrix for the associated homogeneous system B. Compute the inverse C. Multiply by g and integrate tci (Do not include c1 and c2 in your answers). D. Give the solution to the systenm C + (Do not include ci and c2 in your answers).
(1 point) In this problem you will solve the nonhomogeneous system -3 5]- -5 3...
PHYS 121 – Special Problem 1 Multiple Representations and Kinematics Two children are playing a game...
PHYS 121 – Special Problem 1 Multiple Representations and Kinematics Two children are playing a game where they run towards each other and see who can reach a toy that is somewhere between them. In the beginning, Charlie is 23.7 m away from the toy, running towards it at a speed of 0.770 m/s, and is speeding up. At the same time, Amy is 12.5 m away from the toy, is running towards it in the opposite direction as Charlie...
Need to solve problem with Simulink. Need to identify if over damped, critically damped, or under damped. Need to try 2 other coefficients, with explanations. Need screenshot of positiok graphs fo...
 Need to solve problem with Simulink. Need to identify if over
damped, critically damped, or under damped. Need to try 2 other
coefficients, with explanations. Need screenshot of positiok graphs
for all 3 modes, along with screenshot of simulink solution.
Figure 7: Velocity components of projectile at some instant 4.2 Problem #2 The second problem is related to viscous damped free vibration discusion and is problem# 2272 in the textbook. The details of the assignment are given below (You can...
Need to solve problem with Simulink. Need to identify if over
damped, critically damped, or under damped. Need to try 2 other
coefficients, with explanations. Need screenshot of positiok graphs
for all 3 modes, along with screenshot of simulink solution.
Figure 7: Velocity components of projectile at some instant 4.2 Problem #2 The second problem is related to viscous damped free vibration discusion and is problem# 2272 in the textbook. The details of the assignment are given below (You can...
<HW #6 Problem 4.72 ① 2 of 3 Review Part A The two cylindrical rod segments...
 <HW #6 Problem 4.72 ① 2 of 3 Review Part A The two cylindrical rod segments shown in the figure below (Figure 1) are fixed to the rigid walls such that there is a gap of 0.01 in between them when Ti = 60°F. Each rod has a diameter of 1.25 in. Take a = 13(10-)/F, E2 = 10(103) ksi, (oyal = 40 ksi, acu = 9.4(10-/F, (OY)cu - 50 ksi, and Ecu = 15(10) ksi Determine the average normal...
<HW #6 Problem 4.72 ① 2 of 3 Review Part A The two cylindrical rod segments shown in the figure below (Figure 1) are fixed to the rigid walls such that there is a gap of 0.01 in between them when Ti = 60°F. Each rod has a diameter of 1.25 in. Take a = 13(10-)/F, E2 = 10(103) ksi, (oyal = 40 ksi, acu = 9.4(10-/F, (OY)cu - 50 ksi, and Ecu = 15(10) ksi Determine the average normal...
 MATLAB EXERCISE4 This exercise focuses on the inverse-pose kinematics solution for the planar 3-DOF 3R robot (see Figures 3.6 and 3.7; the DH parameters are given in Figure 3.8). The following fixed-length parameters are given: L-4, L-3, and L3 2(m). a) Analytically derive, by hand, the inverse-pose solution for this robot: Given QT calculate all possible multiple solutions for (01 62 63]. (Three methods are pre- sented in the text-choose one of these.) Hint: To simplify the equations, first cal-...
MATLAB EXERCISE4 This exercise focuses on the inverse-pose kinematics solution for the planar 3-DOF 3R robot (see Figures 3.6 and 3.7; the DH parameters are given in Figure 3.8). The following fixed-length parameters are given: L-4, L-3, and L3 2(m). a) Analytically derive, by hand, the inverse-pose solution for this robot: Given QT calculate all possible multiple solutions for (01 62 63]. (Three methods are pre- sented in the text-choose one of these.) Hint: To simplify the equations, first cal-...
 2. Consider the 3-DOF robot configuration in the following figure. Using inverse kinematics, solve for (30 marks) 01.02 and 83, if the position and orientation of point P is given by: 0-1 P=10 Y2 Yor Y
2. Consider the 3-DOF robot configuration in the following figure. Using inverse kinematics, solve for (30 marks) 01.02 and 83, if the position and orientation of point P is given by: 0-1 P=10 Y2 Yor Y
2. Consider the 3-DOF robot configuration in the following figure. Using inverse kinematics, solve for (30 marks) 01.02 and 83, if the position and orientation of point P is given by: 0-1 P=10 Y2 Yor Y
2. Consider the 3-DOF robot configuration in the following figure. Using inverse kinematics, solve for (30 marks) 01.02 and 83, if the position and orientation of point P is given by: 0-1 P=10 Y2 Yor Y
 3-5 Consider the three-link planar manipulator of Figure 3.26. Derive the forward kinematic equations using the DH convention. Figure 3.26: Three-link planar arm with prismatic joint of Problem 3-5.
3-5 Consider the three-link planar manipulator of Figure 3.26. Derive the forward kinematic equations using the DH convention. Figure 3.26: Three-link planar arm with prismatic joint of Problem 3-5.
 Can you solve this question for me?
Link1=0.5
Link2=0.5
Link3=0.55
Link4=0.07
Deliverables: ReportDemonstration of the simulation For a 6 DOF industrial manipulator, which consists of a spherical wrist on top of an antropomorphic robot as shown in the figure 1. Draw the robot, place the coordinate axes of the robot and fill its Denavit elro wrist centre 45 Hartenberg variables table Find the homogenous matrix of the robot for its forward kinematics solution. Find the equations of the joint variables...
Can you solve this question for me?
Link1=0.5
Link2=0.5
Link3=0.55
Link4=0.07
Deliverables: ReportDemonstration of the simulation For a 6 DOF industrial manipulator, which consists of a spherical wrist on top of an antropomorphic robot as shown in the figure 1. Draw the robot, place the coordinate axes of the robot and fill its Denavit elro wrist centre 45 Hartenberg variables table Find the homogenous matrix of the robot for its forward kinematics solution. Find the equations of the joint variables...
 All questions refer to Figure 1 (a) Construct Cartesian coordinate frame for every robot joints (3 marks, C3) (b) Calculate Denavit Harternberg Link-Arm Parameter for every robot joints by filing table below o, joint-angle | dioffset distance l ai arm length cri twist angle joint (3 marks, C3) (d) Calculate end effector position (Px, Py, Pz) or forward kinematic. (5 marks, C3) Solve the problem of inverse kinematic for finding positioning joints or the first two joints (e) (e,) and...
All questions refer to Figure 1 (a) Construct Cartesian coordinate frame for every robot joints (3 marks, C3) (b) Calculate Denavit Harternberg Link-Arm Parameter for every robot joints by filing table below o, joint-angle | dioffset distance l ai arm length cri twist angle joint (3 marks, C3) (d) Calculate end effector position (Px, Py, Pz) or forward kinematic. (5 marks, C3) Solve the problem of inverse kinematic for finding positioning joints or the first two joints (e) (e,) and...
 KHW#3 Problem 3.34 8 of 15 Part A Earh coed an sustain a maximum tension ofl 25 lb. (Figure 1) Determine the largest weight af the lamp that can be supported. Express vour answer to three significant tiqures and include the appronriate units. ? Units Value и H t Ans Subrit Part B Delemine of ced DC for equlbium Eщpя уон апкин икіп thини ніцniсant fiuннк. Figure 1 ol 1. AEit 0: Bequest AnswI Submit Provide Feedback Next
KHW#3 Problem...
KHW#3 Problem 3.34 8 of 15 Part A Earh coed an sustain a maximum tension ofl 25 lb. (Figure 1) Determine the largest weight af the lamp that can be supported. Express vour answer to three significant tiqures and include the appronriate units. ? Units Value и H t Ans Subrit Part B Delemine of ced DC for equlbium Eщpя уон апкин икіп thини ніцniсant fiuннк. Figure 1 ol 1. AEit 0: Bequest AnswI Submit Provide Feedback Next
KHW#3 Problem...
 (1 point) In this problem you will solve the nonhomogeneous system -3 5]- -5 3 y t A. Write a fundamental matrix for the associated homogeneous system B. Compute the inverse C. Multiply by g and integrate tci (Do not include c1 and c2 in your answers). D. Give the solution to the systenm C + (Do not include ci and c2 in your answers).
(1 point) In this problem you will solve the nonhomogeneous system -3 5]- -5 3...
(1 point) In this problem you will solve the nonhomogeneous system -3 5]- -5 3 y t A. Write a fundamental matrix for the associated homogeneous system B. Compute the inverse C. Multiply by g and integrate tci (Do not include c1 and c2 in your answers). D. Give the solution to the systenm C + (Do not include ci and c2 in your answers).
(1 point) In this problem you will solve the nonhomogeneous system -3 5]- -5 3...
 Need to solve problem with Simulink. Need to identify if over
damped, critically damped, or under damped. Need to try 2 other
coefficients, with explanations. Need screenshot of positiok graphs
for all 3 modes, along with screenshot of simulink solution.
Figure 7: Velocity components of projectile at some instant 4.2 Problem #2 The second problem is related to viscous damped free vibration discusion and is problem# 2272 in the textbook. The details of the assignment are given below (You can...
Need to solve problem with Simulink. Need to identify if over
damped, critically damped, or under damped. Need to try 2 other
coefficients, with explanations. Need screenshot of positiok graphs
for all 3 modes, along with screenshot of simulink solution.
Figure 7: Velocity components of projectile at some instant 4.2 Problem #2 The second problem is related to viscous damped free vibration discusion and is problem# 2272 in the textbook. The details of the assignment are given below (You can...
 <HW #6 Problem 4.72 ① 2 of 3 Review Part A The two cylindrical rod segments shown in the figure below (Figure 1) are fixed to the rigid walls such that there is a gap of 0.01 in between them when Ti = 60°F. Each rod has a diameter of 1.25 in. Take a = 13(10-)/F, E2 = 10(103) ksi, (oyal = 40 ksi, acu = 9.4(10-/F, (OY)cu - 50 ksi, and Ecu = 15(10) ksi Determine the average normal...
<HW #6 Problem 4.72 ① 2 of 3 Review Part A The two cylindrical rod segments shown in the figure below (Figure 1) are fixed to the rigid walls such that there is a gap of 0.01 in between them when Ti = 60°F. Each rod has a diameter of 1.25 in. Take a = 13(10-)/F, E2 = 10(103) ksi, (oyal = 40 ksi, acu = 9.4(10-/F, (OY)cu - 50 ksi, and Ecu = 15(10) ksi Determine the average normal...
Most questions answered within 3 hours.
-
Why do organizations decline? What steps can top
management take to halt, decline, and restore organizational...
asked 8 minutes ago -
Under the influence of its drive force, a snowmobile is moving
at a constant velocity along...
asked 22 minutes ago -
What mechanisms Drive speciation??
(I.e. what was Dawins theory on the orgin of species, and how...
asked 1 hour ago -
The manager at a car assembly plant believes that the mean
assembly time for a car...
asked 2 hours ago -
Which of the following is true of electron capture?
A) It decreases the nuclide's mass number...
asked 4 hours ago -
Assuming an efficiency of 43.10%, calculate the actual yield of
magnesium nitrate formed from 114.9 g...
asked 4 hours ago -
The highly pathogenic bacterium Clostridium
perfringens causes gangrene, a disease that results in the
destruction of...
asked 6 hours ago -
In the context of situation analysis, which of the following is
a category for analysis in...
asked 6 hours ago -
In a study of the gas phase decomposition of sulfuryl chloride
at 600 K SO2Cl2(g)SO2(g) +...
asked 6 hours ago -
75 g of 2-propanol (C3H8O) and 25 g of pentane are mixed in a
200 mL...
asked 6 hours ago -
The 2800-turn coil in a dc motor has an area per turn of 1.1 ×
10-2...
asked 6 hours ago -
Draw a combinational logic circuit diagram with a symbol inside
the box for two I/P of...
asked 6 hours ago