
the place poles are -2 ; -3 ; -4
Homework Answers
Add Answer to:
Design a state feedback control u=-Kx, Find K, that could place the closed loop poles at-21 -3,-4...
Problem 2 We have seen in class an algorithm for the design of state feedback controller using po...
 Problem 2 We have seen in class an algorithm for the design of state feedback controller using pole placement for multi-input systems. Consider the system-A Bu with 0 0 4 1. Using the algorithm seen in class, design a state feedback control K, or the gain K, to place the closed loop poles at-2,-3,-4. 2. Exploiting the structure of A and B, find a different feedback gain that place the poles in the same location. This steps shows that there...
Problem 2 We have seen in class an algorithm for the design of state feedback controller using pole placement for multi-input systems. Consider the system-A Bu with 0 0 4 1. Using the algorithm seen in class, design a state feedback control K, or the gain K, to place the closed loop poles at-2,-3,-4. 2. Exploiting the structure of A and B, find a different feedback gain that place the poles in the same location. This steps shows that there...
Problem 2 design of state feedback controller using pole placement for multi-input systems. Consi...
 Problem 2 design of state feedback controller using pole placement for multi-input systems. Consider the system-Ar-Bu with 1. design a state feedback control u-Kr, or the gain K, to place the closed loop poles at -2,-3,-4 2. Exploiting the structure of A and B, find a different feedback gain that place the poles in the same location. This steps shows that there are several ways to design K; by inspection for instance. 3. Use the Matlab command 'place' to generate...
Problem 2 design of state feedback controller using pole placement for multi-input systems. Consider the system-Ar-Bu with 1. design a state feedback control u-Kr, or the gain K, to place the closed loop poles at -2,-3,-4 2. Exploiting the structure of A and B, find a different feedback gain that place the poles in the same location. This steps shows that there are several ways to design K; by inspection for instance. 3. Use the Matlab command 'place' to generate...
Problem 3. Consider the system -2 01 Design feedback control u =-Kx such that the closed-loop pol...
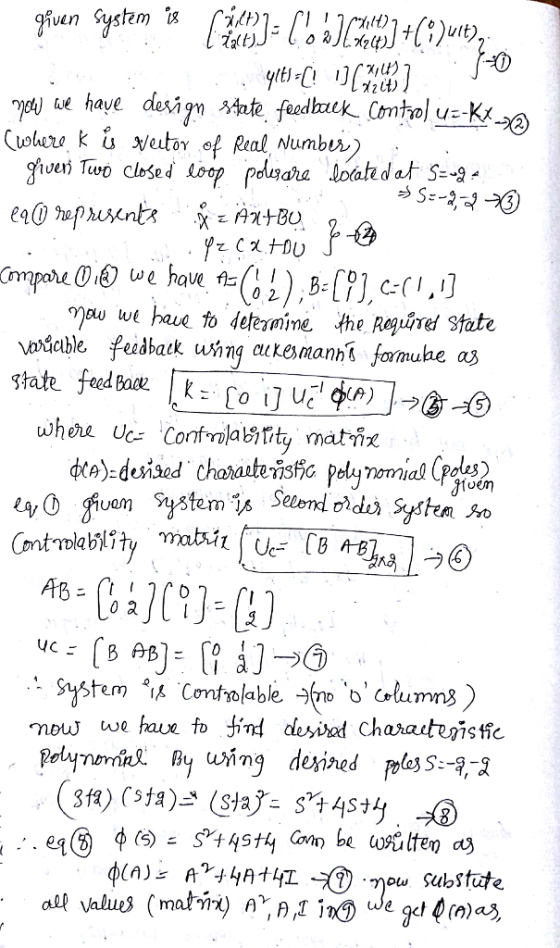
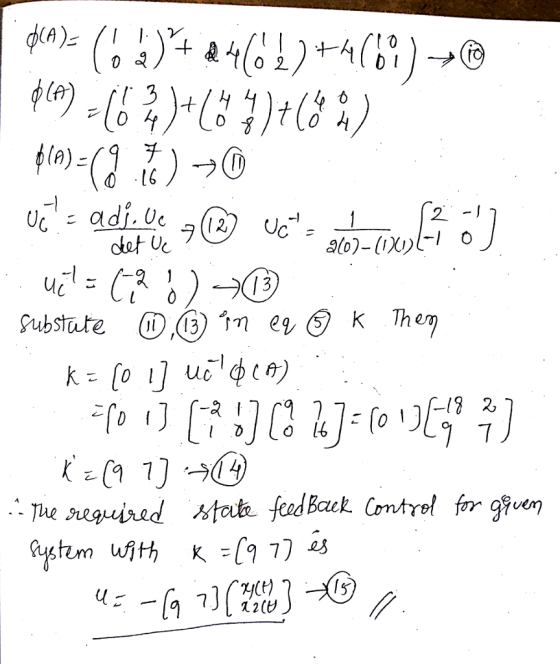
 Problem 3. Consider the system -2 01 Design feedback control u =-Kx such that the closed-loop poles are at s=-2+)2 and s=-2-j2. Assume K= [k1
Problem 3. Consider the system -2 01 Design feedback control u =-Kx such that the closed-loop poles are at s=-2+)2 and s=-2-j2. Assume K= [k1
Problem 3. Consider the system -2 01 Design feedback control u =-Kx such that the closed-loop poles are at s=-2+)2 and s=-2-j2. Assume K= [k1
Problem 3. Consider the system -2 01 Design feedback control u =-Kx such that the closed-loop poles are at s=-2+)2 and s=-2-j2. Assume K= [k1
For the given system, find the full-state feedback gain matrix, K, to place the closed-loop poles...
 For the given system, find the full-state feedback gain matrix, K, to place the closed-loop poles at z - 0.9 1j0.1. 1. x(n + 1)-φχ(n) + l'u(n), with 0.5
For the given system, find the full-state feedback gain matrix, K, to place the closed-loop poles at z - 0.9 1j0.1. 1. x(n + 1)-φχ(n) + l'u(n), with 0.5
Consider the LTI system. Design a state-feedback control law of the form u(t)= -kx(t) such that...
 Consider the LTI system. Design a state-feedback control law of
the form u(t)= -kx(t) such that x(t) goes to zero faster than
e^-t;
Problem 1: (15 points) Consider the LTI system 3 -1 (t)1 3 0 (t)2ut 0 0-1 Desig lim sate-feedback control law of the form u(t)ka(t) such that (t goes to zero faster than e i.e. Hint: fhink of where you want to place the eigenvalues of the closed-loop system.
Consider the LTI system. Design a state-feedback control law of
the form u(t)= -kx(t) such that x(t) goes to zero faster than
e^-t;
Problem 1: (15 points) Consider the LTI system 3 -1 (t)1 3 0 (t)2ut 0 0-1 Desig lim sate-feedback control law of the form u(t)ka(t) such that (t goes to zero faster than e i.e. Hint: fhink of where you want to place the eigenvalues of the closed-loop system.
Consider a unity feedback control architecture where P(s) = 1/s^2 and C(s) = K * ((s + z)/(s + p)...
 Consider a unity feedback control architecture where P(s) =
1/s^2 and C(s) = K * ((s + z)/(s + p)) . It is desired to design
the controller to place the dominant closed-loop poles at sd = −2 ±
2j. Fix the pole of the compensator at −20 rad/sec and use root
locus techniques to find values of z and K to place the closed–loop
poles at sd .
Problem 4 (placing a zero) Consider a unity feedback control architecture...
Consider a unity feedback control architecture where P(s) =
1/s^2 and C(s) = K * ((s + z)/(s + p)) . It is desired to design
the controller to place the dominant closed-loop poles at sd = −2 ±
2j. Fix the pole of the compensator at −20 rad/sec and use root
locus techniques to find values of z and K to place the closed–loop
poles at sd .
Problem 4 (placing a zero) Consider a unity feedback control architecture...
Design state feedback controllers to the following systems such that the closed loop poles are placed at (0.25 and -0.25) o.] ь-r] ^-[.ao? c.10 וי d-o 0.02 0.3 0.1 0 0 0.2 Design state feedback...
 Design state feedback controllers to the following systems such that the closed loop poles are placed at (0.25 and -0.25) o.] ь-r] ^-[.ao? c.10 וי d-o 0.02 0.3 0.1 0 0 0.2
Design state feedback controllers to the following systems such that the closed loop poles are placed at (0.25 and -0.25) o.] ь-r] ^-[.ao? c.10 וי d-o 0.02 0.3 0.1 0 0 0.2
Design state feedback controllers to the following systems such that the closed loop poles are placed at (0.25 and -0.25) o.] ь-r] ^-[.ao? c.10 וי d-o 0.02 0.3 0.1 0 0 0.2
Design state feedback controllers to the following systems such that the closed loop poles are placed at (0.25 and -0.25) o.] ь-r] ^-[.ao? c.10 וי d-o 0.02 0.3 0.1 0 0 0.2
Spring 2019 3. Given a closed-loop control system with unity feedback is shown in the block...
 Spring 2019 3. Given a closed-loop control system with unity feedback is shown in the block diagram. G(s) is the open-loop transfer function, and the controller is a gain, K. 1. (20) Calculate the open-loop transfer function tar →Q--t G(s) (10) Calculate the steady-state error to a step input of the open-loop system. 7. (in Bode Form) from the Bode plot. (10) Calculate the shortest possible settling time with a percentage overshoot of 5% or less. 8. 2. (10)Plot the...
Spring 2019 3. Given a closed-loop control system with unity feedback is shown in the block diagram. G(s) is the open-loop transfer function, and the controller is a gain, K. 1. (20) Calculate the open-loop transfer function tar →Q--t G(s) (10) Calculate the steady-state error to a step input of the open-loop system. 7. (in Bode Form) from the Bode plot. (10) Calculate the shortest possible settling time with a percentage overshoot of 5% or less. 8. 2. (10)Plot the...
Q3. Consider a single loop unity feedback control system of the open loop transfer function (a) Find the range of values of the gain K and the parameter p so that: (i) The overshoot is less than 10%....
 Q3. Consider a single loop unity feedback control system of the open loop transfer function (a) Find the range of values of the gain K and the parameter p so that: (i) The overshoot is less than 10%. (ii)The settling time is less than 4 seconds Note: , 4.6 M. = exp CO 40% (b)What are the three elements in a PID controller? Considering each in turn, explain the main ways in which varying the parameters affects the closed-loop system...
Q3. Consider a single loop unity feedback control system of the open loop transfer function (a) Find the range of values of the gain K and the parameter p so that: (i) The overshoot is less than 10%. (ii)The settling time is less than 4 seconds Note: , 4.6 M. = exp CO 40% (b)What are the three elements in a PID controller? Considering each in turn, explain the main ways in which varying the parameters affects the closed-loop system...
- 4. Full State Feedback and Observer Design Consider the plant s + 1 G(s)- (s + a(s +8(s +10) where a-1. a) Find a...
 - 4. Full State Feedback and Observer Design Consider the plant s + 1 G(s)- (s + a(s +8(s +10) where a-1. a) Find a convenient state space representation of model G(s) . b) Using place design a controller for the system that puts the poles at -1 and-2 +-2 . c) Using place design an observer with poles at-10,-11 and-12 d) Simulate the states with the state estimates overlaid e)Find a state space representation of the closed loop system...
- 4. Full State Feedback and Observer Design Consider the plant s + 1 G(s)- (s + a(s +8(s +10) where a-1. a) Find a convenient state space representation of model G(s) . b) Using place design a controller for the system that puts the poles at -1 and-2 +-2 . c) Using place design an observer with poles at-10,-11 and-12 d) Simulate the states with the state estimates overlaid e)Find a state space representation of the closed loop system...
 Problem 2 We have seen in class an algorithm for the design of state feedback controller using pole placement for multi-input systems. Consider the system-A Bu with 0 0 4 1. Using the algorithm seen in class, design a state feedback control K, or the gain K, to place the closed loop poles at-2,-3,-4. 2. Exploiting the structure of A and B, find a different feedback gain that place the poles in the same location. This steps shows that there...
Problem 2 We have seen in class an algorithm for the design of state feedback controller using pole placement for multi-input systems. Consider the system-A Bu with 0 0 4 1. Using the algorithm seen in class, design a state feedback control K, or the gain K, to place the closed loop poles at-2,-3,-4. 2. Exploiting the structure of A and B, find a different feedback gain that place the poles in the same location. This steps shows that there...
 Problem 2 design of state feedback controller using pole placement for multi-input systems. Consider the system-Ar-Bu with 1. design a state feedback control u-Kr, or the gain K, to place the closed loop poles at -2,-3,-4 2. Exploiting the structure of A and B, find a different feedback gain that place the poles in the same location. This steps shows that there are several ways to design K; by inspection for instance. 3. Use the Matlab command 'place' to generate...
Problem 2 design of state feedback controller using pole placement for multi-input systems. Consider the system-Ar-Bu with 1. design a state feedback control u-Kr, or the gain K, to place the closed loop poles at -2,-3,-4 2. Exploiting the structure of A and B, find a different feedback gain that place the poles in the same location. This steps shows that there are several ways to design K; by inspection for instance. 3. Use the Matlab command 'place' to generate...
 Problem 3. Consider the system -2 01 Design feedback control u =-Kx such that the closed-loop poles are at s=-2+)2 and s=-2-j2. Assume K= [k1
Problem 3. Consider the system -2 01 Design feedback control u =-Kx such that the closed-loop poles are at s=-2+)2 and s=-2-j2. Assume K= [k1
Problem 3. Consider the system -2 01 Design feedback control u =-Kx such that the closed-loop poles are at s=-2+)2 and s=-2-j2. Assume K= [k1
Problem 3. Consider the system -2 01 Design feedback control u =-Kx such that the closed-loop poles are at s=-2+)2 and s=-2-j2. Assume K= [k1
 For the given system, find the full-state feedback gain matrix, K, to place the closed-loop poles at z - 0.9 1j0.1. 1. x(n + 1)-φχ(n) + l'u(n), with 0.5
For the given system, find the full-state feedback gain matrix, K, to place the closed-loop poles at z - 0.9 1j0.1. 1. x(n + 1)-φχ(n) + l'u(n), with 0.5
 Consider the LTI system. Design a state-feedback control law of
the form u(t)= -kx(t) such that x(t) goes to zero faster than
e^-t;
Problem 1: (15 points) Consider the LTI system 3 -1 (t)1 3 0 (t)2ut 0 0-1 Desig lim sate-feedback control law of the form u(t)ka(t) such that (t goes to zero faster than e i.e. Hint: fhink of where you want to place the eigenvalues of the closed-loop system.
Consider the LTI system. Design a state-feedback control law of
the form u(t)= -kx(t) such that x(t) goes to zero faster than
e^-t;
Problem 1: (15 points) Consider the LTI system 3 -1 (t)1 3 0 (t)2ut 0 0-1 Desig lim sate-feedback control law of the form u(t)ka(t) such that (t goes to zero faster than e i.e. Hint: fhink of where you want to place the eigenvalues of the closed-loop system.
 Consider a unity feedback control architecture where P(s) =
1/s^2 and C(s) = K * ((s + z)/(s + p)) . It is desired to design
the controller to place the dominant closed-loop poles at sd = −2 ±
2j. Fix the pole of the compensator at −20 rad/sec and use root
locus techniques to find values of z and K to place the closed–loop
poles at sd .
Problem 4 (placing a zero) Consider a unity feedback control architecture...
Consider a unity feedback control architecture where P(s) =
1/s^2 and C(s) = K * ((s + z)/(s + p)) . It is desired to design
the controller to place the dominant closed-loop poles at sd = −2 ±
2j. Fix the pole of the compensator at −20 rad/sec and use root
locus techniques to find values of z and K to place the closed–loop
poles at sd .
Problem 4 (placing a zero) Consider a unity feedback control architecture...
 Design state feedback controllers to the following systems such that the closed loop poles are placed at (0.25 and -0.25) o.] ь-r] ^-[.ao? c.10 וי d-o 0.02 0.3 0.1 0 0 0.2
Design state feedback controllers to the following systems such that the closed loop poles are placed at (0.25 and -0.25) o.] ь-r] ^-[.ao? c.10 וי d-o 0.02 0.3 0.1 0 0 0.2
Design state feedback controllers to the following systems such that the closed loop poles are placed at (0.25 and -0.25) o.] ь-r] ^-[.ao? c.10 וי d-o 0.02 0.3 0.1 0 0 0.2
Design state feedback controllers to the following systems such that the closed loop poles are placed at (0.25 and -0.25) o.] ь-r] ^-[.ao? c.10 וי d-o 0.02 0.3 0.1 0 0 0.2
 Spring 2019 3. Given a closed-loop control system with unity feedback is shown in the block diagram. G(s) is the open-loop transfer function, and the controller is a gain, K. 1. (20) Calculate the open-loop transfer function tar →Q--t G(s) (10) Calculate the steady-state error to a step input of the open-loop system. 7. (in Bode Form) from the Bode plot. (10) Calculate the shortest possible settling time with a percentage overshoot of 5% or less. 8. 2. (10)Plot the...
Spring 2019 3. Given a closed-loop control system with unity feedback is shown in the block diagram. G(s) is the open-loop transfer function, and the controller is a gain, K. 1. (20) Calculate the open-loop transfer function tar →Q--t G(s) (10) Calculate the steady-state error to a step input of the open-loop system. 7. (in Bode Form) from the Bode plot. (10) Calculate the shortest possible settling time with a percentage overshoot of 5% or less. 8. 2. (10)Plot the...
 Q3. Consider a single loop unity feedback control system of the open loop transfer function (a) Find the range of values of the gain K and the parameter p so that: (i) The overshoot is less than 10%. (ii)The settling time is less than 4 seconds Note: , 4.6 M. = exp CO 40% (b)What are the three elements in a PID controller? Considering each in turn, explain the main ways in which varying the parameters affects the closed-loop system...
Q3. Consider a single loop unity feedback control system of the open loop transfer function (a) Find the range of values of the gain K and the parameter p so that: (i) The overshoot is less than 10%. (ii)The settling time is less than 4 seconds Note: , 4.6 M. = exp CO 40% (b)What are the three elements in a PID controller? Considering each in turn, explain the main ways in which varying the parameters affects the closed-loop system...
 - 4. Full State Feedback and Observer Design Consider the plant s + 1 G(s)- (s + a(s +8(s +10) where a-1. a) Find a convenient state space representation of model G(s) . b) Using place design a controller for the system that puts the poles at -1 and-2 +-2 . c) Using place design an observer with poles at-10,-11 and-12 d) Simulate the states with the state estimates overlaid e)Find a state space representation of the closed loop system...
- 4. Full State Feedback and Observer Design Consider the plant s + 1 G(s)- (s + a(s +8(s +10) where a-1. a) Find a convenient state space representation of model G(s) . b) Using place design a controller for the system that puts the poles at -1 and-2 +-2 . c) Using place design an observer with poles at-10,-11 and-12 d) Simulate the states with the state estimates overlaid e)Find a state space representation of the closed loop system...
Most questions answered within 3 hours.
-
The free energy change for the following reaction at 25 °C, when
[Sn2+] = 1.17 M...
asked 1 hour ago -
An MNE is this kind of industry when competition in one country
is essentially independent of...
asked 2 hours ago -
. For this set of questions, determine what
proportion of a normal distribution is located betweeneach...
asked 3 hours ago -
A college student is employed as a door-to-door newspaper
salesman. Historical data suggests that the student...
asked 4 hours ago -
MATLAB HW 11 problem using Switch Case and Input commands
Write a script file that calculates...
asked 4 hours ago -
Considering gravitational time dilation, calculate the time that
passes in Earth’s surface while 1 hour passes...
asked 4 hours ago -
Minitab Problem: Take the Lake Hume June rainfall data and find
use the processes outlined in...
asked 5 hours ago -
X Company is trying to decide whether to continue using old
equipment to make Product A...
asked 5 hours ago -
IN PYTHON ONLY !! Program 2: Re-work
program #5 (WeeklyHours) from the previous assignment such that...
asked 6 hours ago -
The average length of time between arrivals at a turnpike
toll-booth is 26 seconds. What is...
asked 7 hours ago -
(a) A piston at 6.1 atm contains a gas that occupies a volume of
3.5 L....
asked 9 hours ago -
Please answer true or false. Words
cannot be changed or added in to make it true...
asked 9 hours ago