part 2 & part 3 please...
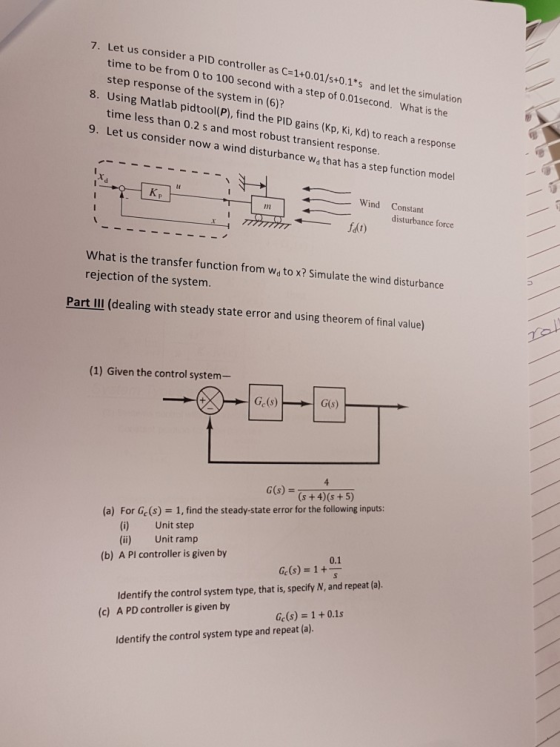
7. Let us consider a PID controller as C-1+0.01/s+0.1's and let the simulation time to be from 0 to 100 second with a step of 0.01second. What is the step response of the system in (6)? 8. Usin g Matlab pidtool(P), find the PID gains (Kp, Ki, Kd) to reach a response time less than 0.2 s and most robust transient response. Let us cons ider now a wind disturbance ws that has a step function model e w that has a step function model Kp Wind Constant 4 In disturbance force ft) What is the transfer function from w to x? Simulate the wind disturbance rejection of the system. Part III (dealing with steady state error and using theorem of final value) (1) Given the control system Ge(s) 4 1, find the steady-state error for the following inputs Unit step Unit ramp (a) For Ge(s) (i) (ii) 0.1 (b) A Pl controller is given by Ge(s)1 Identify the control system type, that is, specify N, and repeat (a). (c) A PD controller is given by Ge(s)1+0.1s Identify the control system type and repeat (a)
Homework Answers



Add Answer to:
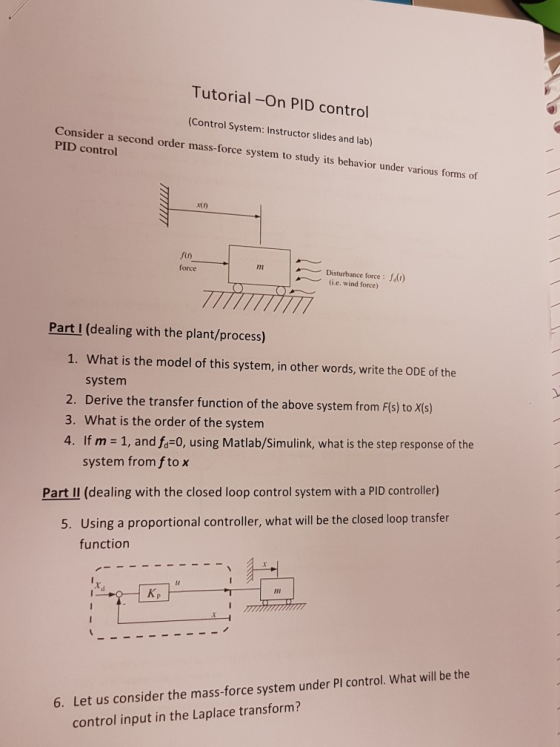
Tutorial -On PID control (Control System: Instructor slides and lab) Consider a second order mass...
3. Consider the following mass-spring-damper system. Let m= 1 kg, b = 10 Ns/m, and k...
 3. Consider the following mass-spring-damper system. Let m= 1 kg, b = 10 Ns/m, and k = 20 N/m. b m F k a) Derive the open-loop transfer function X(S) F(s) Plot the step response using matlab. b) Derive the closed-loop transfer function with P-controller with Kp = 300. Plot the step response using matlab. c) Derive the closed-loop transfer function with PD-controller with Ky and Ka = 10. Plot the step response using matlab. d) Derive the closed-loop transfer...
3. Consider the following mass-spring-damper system. Let m= 1 kg, b = 10 Ns/m, and k = 20 N/m. b m F k a) Derive the open-loop transfer function X(S) F(s) Plot the step response using matlab. b) Derive the closed-loop transfer function with P-controller with Kp = 300. Plot the step response using matlab. c) Derive the closed-loop transfer function with PD-controller with Ky and Ka = 10. Plot the step response using matlab. d) Derive the closed-loop transfer...
PLEASE DO IN MATLAB Problem 8 (PID feedback control). This problem is about Proportional-Integral-Derivative feedback control...
 PLEASE DO IN MATLAB
Problem 8 (PID feedback control). This problem is about Proportional-Integral-Derivative feedback control systems. The general setup of the system we are going to look at is given below: e(t) u(t) |C(s) y(t) P(s) r(t) Here the various signals are: signal/system r(t) y(t) e(t) P(s) C(s) и(t) meaning desired output signal actual output signal error signal r(t) y(t) Laplace transform of the (unstable) plant controller to be designed control signal Our goal is to design a controller...
PLEASE DO IN MATLAB
Problem 8 (PID feedback control). This problem is about Proportional-Integral-Derivative feedback control systems. The general setup of the system we are going to look at is given below: e(t) u(t) |C(s) y(t) P(s) r(t) Here the various signals are: signal/system r(t) y(t) e(t) P(s) C(s) и(t) meaning desired output signal actual output signal error signal r(t) y(t) Laplace transform of the (unstable) plant controller to be designed control signal Our goal is to design a controller...
Implement a PID controller to control the transfer function shown below. The PID controller and plant...
 Implement a PID controller to control the transfer function
shown below. The PID controller and plant transfer function should
be in a closed feedback loop. Assume the feedback loop has a Gain
of 5 associated with it i.e. . The Transfer function of a PID
controller is also given below. Start by:
6. Implement a PID controller to control the transfer function shown below. The PID feedback loop has a Gain of 5 associated with it i.e. (HS) = 5)....
Implement a PID controller to control the transfer function
shown below. The PID controller and plant transfer function should
be in a closed feedback loop. Assume the feedback loop has a Gain
of 5 associated with it i.e. . The Transfer function of a PID
controller is also given below. Start by:
6. Implement a PID controller to control the transfer function shown below. The PID feedback loop has a Gain of 5 associated with it i.e. (HS) = 5)....
System dynamics and control course. Use only “MATLAB “to solve this. Need a pro to help Let a system have plant transfer function (00.2) s3 +22s 156s+232 Design a PID controller such that the cl...
 System dynamics and control course.
Use only “MATLAB “to solve this.
Need a pro to help
Let a system have plant transfer function (00.2) s3 +22s 156s+232 Design a PID controller such that the closed-loop rise time is less than 0.5 seconds, the overshoot is less than 10%, and the steady-state error is zero for a step command.
Let a system have plant transfer function (00.2) s3 +22s 156s+232 Design a PID controller such that the closed-loop rise time is...
System dynamics and control course.
Use only “MATLAB “to solve this.
Need a pro to help
Let a system have plant transfer function (00.2) s3 +22s 156s+232 Design a PID controller such that the closed-loop rise time is less than 0.5 seconds, the overshoot is less than 10%, and the steady-state error is zero for a step command.
Let a system have plant transfer function (00.2) s3 +22s 156s+232 Design a PID controller such that the closed-loop rise time is...
Matlab 2. A PID controller allows one to adjust the performance of a plant to the...
 Matlab
2. A PID controller allows one to adjust the performance of a plant to the designer's specifications. The following system is given (s+1)(0.2 s+ 1 )(0.04 s + 1 )(0.00%+1) Create this system symbolically in Matlab. Use the command expand to get it in the form of a ratio of polynomials. Use the coefficients to create a transfer function. Import the transfer function to 'pidTuner. There is no perfect controller. So, to achieve the best result, one has to...
Matlab
2. A PID controller allows one to adjust the performance of a plant to the designer's specifications. The following system is given (s+1)(0.2 s+ 1 )(0.04 s + 1 )(0.00%+1) Create this system symbolically in Matlab. Use the command expand to get it in the form of a ratio of polynomials. Use the coefficients to create a transfer function. Import the transfer function to 'pidTuner. There is no perfect controller. So, to achieve the best result, one has to...
A unity feedback closed loop control system is displayed in Figure 4. (a) Assume that the control...
 Please solve as a MATLAB code.
A unity feedback closed loop control system is displayed in Figure 4. (a) Assume that the controller is given by G (s) 2. Based on the lsim function of MATLAB, calculate and obtain the graph of the response for (t) at. Here a 0.5°/s. Find the height error after 10 seconds, (b) In order to reduce the steady-state error, substitute G (s) with the following controller This is a Proportional-Integral (PI) controller. Repeat part...
Please solve as a MATLAB code.
A unity feedback closed loop control system is displayed in Figure 4. (a) Assume that the controller is given by G (s) 2. Based on the lsim function of MATLAB, calculate and obtain the graph of the response for (t) at. Here a 0.5°/s. Find the height error after 10 seconds, (b) In order to reduce the steady-state error, substitute G (s) with the following controller This is a Proportional-Integral (PI) controller. Repeat part...
Please answer all the questions with MATLAB and also upload the code. Thanks. 3 Experiment - Matlab controller complexity and steady-state 3.1 Consider the satellite-attitude control problem shown in...
 Please answer all the questions with MATLAB and also upload the
code. Thanks.
3 Experiment - Matlab controller complexity and steady-state 3.1 Consider the satellite-attitude control problem shown in following figure where the normalized parameters are J 10 spacecraft inertia; N-m-sec2 /rad erreference satellite attitude; rad actual satellite attitude; rad Hy 1 sensor scale; factor volts/rad Hr = 1 reference sensor scale factor ; volts/rad w= disturbance torque: N-m H, D(s) Js Figure 4: Satellite attitude control Suppose kP =...
Please answer all the questions with MATLAB and also upload the
code. Thanks.
3 Experiment - Matlab controller complexity and steady-state 3.1 Consider the satellite-attitude control problem shown in following figure where the normalized parameters are J 10 spacecraft inertia; N-m-sec2 /rad erreference satellite attitude; rad actual satellite attitude; rad Hy 1 sensor scale; factor volts/rad Hr = 1 reference sensor scale factor ; volts/rad w= disturbance torque: N-m H, D(s) Js Figure 4: Satellite attitude control Suppose kP =...
Using MATLAB. We want to control output(y) using PID control in Kds? +Kps+Ki C(s) S Input(r)...
 Using MATLAB. We want to control output(y) using PID control in Kds? +Kps+Ki C(s) S Input(r) is a magnitude1 step. Plant is given by 1 (s+1)(s+2)(s+59) controller plant 14 y C(s) P(S) a) Calculate Closed Loop characteristics and steady-state error(unity feedback and Kp=1, Kd=1, Ki=0)) 2.Using automatic PID tuning function, reduce steady-state error=0 and report Kp=?, Kd=? And Ki=?
Using MATLAB. We want to control output(y) using PID control in Kds? +Kps+Ki C(s) S Input(r) is a magnitude1 step. Plant is given by 1 (s+1)(s+2)(s+59) controller plant 14 y C(s) P(S) a) Calculate Closed Loop characteristics and steady-state error(unity feedback and Kp=1, Kd=1, Ki=0)) 2.Using automatic PID tuning function, reduce steady-state error=0 and report Kp=?, Kd=? And Ki=?
Using MATLAB. We want to control output(y) using PID control in Kds? +Kps+Ki C(s) S Input(r)...
 Using MATLAB. We want to control output(y) using PID control in Kds? +Kps+Ki C(s) S Input(r) is a magnitude1 step. Plant is given by 1 (s+1)(3+2)(s+5 ) controller plant + 14 y C(s) P(S) a) Calculate Closed Loop characteristics and steady-state error(unity feedback and Kp=1, Kd=1, Ki=0)) 2.Using automatic PID tuning function, reduce steady-state error=0 and report Kp=?, Kd=? And Ki=?
Using MATLAB. We want to control output(y) using PID control in Kds? +Kps+Ki C(s) S Input(r) is a magnitude1 step. Plant is given by 1 (s+1)(3+2)(s+5 ) controller plant + 14 y C(s) P(S) a) Calculate Closed Loop characteristics and steady-state error(unity feedback and Kp=1, Kd=1, Ki=0)) 2.Using automatic PID tuning function, reduce steady-state error=0 and report Kp=?, Kd=? And Ki=?
please use MATLAB, screenshot the code and the plots. Answer all parts. Laboratory description: The speed...
 please use MATLAB, screenshot the code and the plots. Answer all
parts.
Laboratory description: The speed control of a high-speed train is represented by the system shown in Figure 1. The transfer function of the train dynamics is as follows. G(s) = 2 + 10s + 20 Laboratory assignment: Part A. For the open-loop system described by the following block diagram, assume that the input r(t) is a unit step. (1) Compute the steady-state system output Yss. (2) Find the...
please use MATLAB, screenshot the code and the plots. Answer all
parts.
Laboratory description: The speed control of a high-speed train is represented by the system shown in Figure 1. The transfer function of the train dynamics is as follows. G(s) = 2 + 10s + 20 Laboratory assignment: Part A. For the open-loop system described by the following block diagram, assume that the input r(t) is a unit step. (1) Compute the steady-state system output Yss. (2) Find the...
 3. Consider the following mass-spring-damper system. Let m= 1 kg, b = 10 Ns/m, and k = 20 N/m. b m F k a) Derive the open-loop transfer function X(S) F(s) Plot the step response using matlab. b) Derive the closed-loop transfer function with P-controller with Kp = 300. Plot the step response using matlab. c) Derive the closed-loop transfer function with PD-controller with Ky and Ka = 10. Plot the step response using matlab. d) Derive the closed-loop transfer...
3. Consider the following mass-spring-damper system. Let m= 1 kg, b = 10 Ns/m, and k = 20 N/m. b m F k a) Derive the open-loop transfer function X(S) F(s) Plot the step response using matlab. b) Derive the closed-loop transfer function with P-controller with Kp = 300. Plot the step response using matlab. c) Derive the closed-loop transfer function with PD-controller with Ky and Ka = 10. Plot the step response using matlab. d) Derive the closed-loop transfer...
 PLEASE DO IN MATLAB
Problem 8 (PID feedback control). This problem is about Proportional-Integral-Derivative feedback control systems. The general setup of the system we are going to look at is given below: e(t) u(t) |C(s) y(t) P(s) r(t) Here the various signals are: signal/system r(t) y(t) e(t) P(s) C(s) и(t) meaning desired output signal actual output signal error signal r(t) y(t) Laplace transform of the (unstable) plant controller to be designed control signal Our goal is to design a controller...
PLEASE DO IN MATLAB
Problem 8 (PID feedback control). This problem is about Proportional-Integral-Derivative feedback control systems. The general setup of the system we are going to look at is given below: e(t) u(t) |C(s) y(t) P(s) r(t) Here the various signals are: signal/system r(t) y(t) e(t) P(s) C(s) и(t) meaning desired output signal actual output signal error signal r(t) y(t) Laplace transform of the (unstable) plant controller to be designed control signal Our goal is to design a controller...
 Implement a PID controller to control the transfer function
shown below. The PID controller and plant transfer function should
be in a closed feedback loop. Assume the feedback loop has a Gain
of 5 associated with it i.e. . The Transfer function of a PID
controller is also given below. Start by:
6. Implement a PID controller to control the transfer function shown below. The PID feedback loop has a Gain of 5 associated with it i.e. (HS) = 5)....
Implement a PID controller to control the transfer function
shown below. The PID controller and plant transfer function should
be in a closed feedback loop. Assume the feedback loop has a Gain
of 5 associated with it i.e. . The Transfer function of a PID
controller is also given below. Start by:
6. Implement a PID controller to control the transfer function shown below. The PID feedback loop has a Gain of 5 associated with it i.e. (HS) = 5)....
 System dynamics and control course.
Use only “MATLAB “to solve this.
Need a pro to help
Let a system have plant transfer function (00.2) s3 +22s 156s+232 Design a PID controller such that the closed-loop rise time is less than 0.5 seconds, the overshoot is less than 10%, and the steady-state error is zero for a step command.
Let a system have plant transfer function (00.2) s3 +22s 156s+232 Design a PID controller such that the closed-loop rise time is...
System dynamics and control course.
Use only “MATLAB “to solve this.
Need a pro to help
Let a system have plant transfer function (00.2) s3 +22s 156s+232 Design a PID controller such that the closed-loop rise time is less than 0.5 seconds, the overshoot is less than 10%, and the steady-state error is zero for a step command.
Let a system have plant transfer function (00.2) s3 +22s 156s+232 Design a PID controller such that the closed-loop rise time is...
 Matlab
2. A PID controller allows one to adjust the performance of a plant to the designer's specifications. The following system is given (s+1)(0.2 s+ 1 )(0.04 s + 1 )(0.00%+1) Create this system symbolically in Matlab. Use the command expand to get it in the form of a ratio of polynomials. Use the coefficients to create a transfer function. Import the transfer function to 'pidTuner. There is no perfect controller. So, to achieve the best result, one has to...
Matlab
2. A PID controller allows one to adjust the performance of a plant to the designer's specifications. The following system is given (s+1)(0.2 s+ 1 )(0.04 s + 1 )(0.00%+1) Create this system symbolically in Matlab. Use the command expand to get it in the form of a ratio of polynomials. Use the coefficients to create a transfer function. Import the transfer function to 'pidTuner. There is no perfect controller. So, to achieve the best result, one has to...
 Please solve as a MATLAB code.
A unity feedback closed loop control system is displayed in Figure 4. (a) Assume that the controller is given by G (s) 2. Based on the lsim function of MATLAB, calculate and obtain the graph of the response for (t) at. Here a 0.5°/s. Find the height error after 10 seconds, (b) In order to reduce the steady-state error, substitute G (s) with the following controller This is a Proportional-Integral (PI) controller. Repeat part...
Please solve as a MATLAB code.
A unity feedback closed loop control system is displayed in Figure 4. (a) Assume that the controller is given by G (s) 2. Based on the lsim function of MATLAB, calculate and obtain the graph of the response for (t) at. Here a 0.5°/s. Find the height error after 10 seconds, (b) In order to reduce the steady-state error, substitute G (s) with the following controller This is a Proportional-Integral (PI) controller. Repeat part...
 Please answer all the questions with MATLAB and also upload the
code. Thanks.
3 Experiment - Matlab controller complexity and steady-state 3.1 Consider the satellite-attitude control problem shown in following figure where the normalized parameters are J 10 spacecraft inertia; N-m-sec2 /rad erreference satellite attitude; rad actual satellite attitude; rad Hy 1 sensor scale; factor volts/rad Hr = 1 reference sensor scale factor ; volts/rad w= disturbance torque: N-m H, D(s) Js Figure 4: Satellite attitude control Suppose kP =...
Please answer all the questions with MATLAB and also upload the
code. Thanks.
3 Experiment - Matlab controller complexity and steady-state 3.1 Consider the satellite-attitude control problem shown in following figure where the normalized parameters are J 10 spacecraft inertia; N-m-sec2 /rad erreference satellite attitude; rad actual satellite attitude; rad Hy 1 sensor scale; factor volts/rad Hr = 1 reference sensor scale factor ; volts/rad w= disturbance torque: N-m H, D(s) Js Figure 4: Satellite attitude control Suppose kP =...
 Using MATLAB. We want to control output(y) using PID control in Kds? +Kps+Ki C(s) S Input(r) is a magnitude1 step. Plant is given by 1 (s+1)(s+2)(s+59) controller plant 14 y C(s) P(S) a) Calculate Closed Loop characteristics and steady-state error(unity feedback and Kp=1, Kd=1, Ki=0)) 2.Using automatic PID tuning function, reduce steady-state error=0 and report Kp=?, Kd=? And Ki=?
Using MATLAB. We want to control output(y) using PID control in Kds? +Kps+Ki C(s) S Input(r) is a magnitude1 step. Plant is given by 1 (s+1)(s+2)(s+59) controller plant 14 y C(s) P(S) a) Calculate Closed Loop characteristics and steady-state error(unity feedback and Kp=1, Kd=1, Ki=0)) 2.Using automatic PID tuning function, reduce steady-state error=0 and report Kp=?, Kd=? And Ki=?
 Using MATLAB. We want to control output(y) using PID control in Kds? +Kps+Ki C(s) S Input(r) is a magnitude1 step. Plant is given by 1 (s+1)(3+2)(s+5 ) controller plant + 14 y C(s) P(S) a) Calculate Closed Loop characteristics and steady-state error(unity feedback and Kp=1, Kd=1, Ki=0)) 2.Using automatic PID tuning function, reduce steady-state error=0 and report Kp=?, Kd=? And Ki=?
Using MATLAB. We want to control output(y) using PID control in Kds? +Kps+Ki C(s) S Input(r) is a magnitude1 step. Plant is given by 1 (s+1)(3+2)(s+5 ) controller plant + 14 y C(s) P(S) a) Calculate Closed Loop characteristics and steady-state error(unity feedback and Kp=1, Kd=1, Ki=0)) 2.Using automatic PID tuning function, reduce steady-state error=0 and report Kp=?, Kd=? And Ki=?
 please use MATLAB, screenshot the code and the plots. Answer all
parts.
Laboratory description: The speed control of a high-speed train is represented by the system shown in Figure 1. The transfer function of the train dynamics is as follows. G(s) = 2 + 10s + 20 Laboratory assignment: Part A. For the open-loop system described by the following block diagram, assume that the input r(t) is a unit step. (1) Compute the steady-state system output Yss. (2) Find the...
please use MATLAB, screenshot the code and the plots. Answer all
parts.
Laboratory description: The speed control of a high-speed train is represented by the system shown in Figure 1. The transfer function of the train dynamics is as follows. G(s) = 2 + 10s + 20 Laboratory assignment: Part A. For the open-loop system described by the following block diagram, assume that the input r(t) is a unit step. (1) Compute the steady-state system output Yss. (2) Find the...
Most questions answered within 3 hours.
-
Phosphorous + bromine = phosphorous tribromide. If 35.0 g of
bromine are reacted and 27.9 grams...
asked 57 minutes ago -
Derive the long wavelength limit of the Planck energy density
distribution
asked 47 minutes ago -
Calculate the pH of each of the following solutions.
0.50 M HBr
3.1×10−4 M KOH
4.2×10−5...
asked 4 hours ago -
For the year ended December 31, Depot Max’s cost of merchandise
sold was $85,600. Inventory at the...
asked 4 hours ago -
Week 10 - Professional Memo Assignment
Professional Memo Assignment
Your mission for this week, should you...
asked 4 hours ago -
Write a Python program that stores the data for each
player on the team, and it...
asked 4 hours ago -
In
the last 3 months, mike never knows when he is going to get his
allowance...
asked 5 hours ago -
Is Ca(OH)2 a Bronsted base, Lewis base, or both? Why?
asked 4 hours ago -
1A- Why don’t voters complain about U.S. tariffs on imported
sugar?
Because sugar is only a...
asked 5 hours ago -
Cash Payback Period
Primera Banco is evaluating two capital investment proposals for
a drive-up ATM kiosk,...
asked 5 hours ago -
Create a button in Swift (Xcode) that will create a charge,
create a charge using Stripe's...
asked 5 hours ago -
The reaction rate of CO and NO2 in the reaction
CO(g) + NO2(g) → CO2(g) +...
asked 5 hours ago