Please answer all the questions with MATLAB and also upload the code. Thanks.
Homework Answers
Add Answer to:
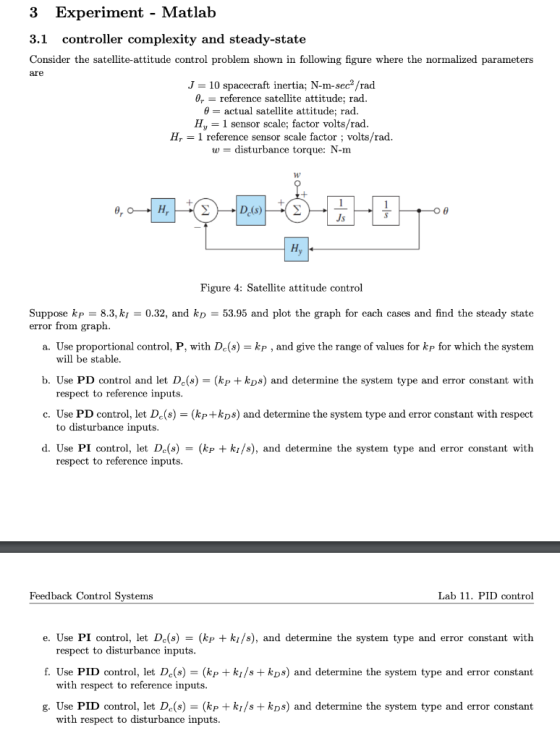
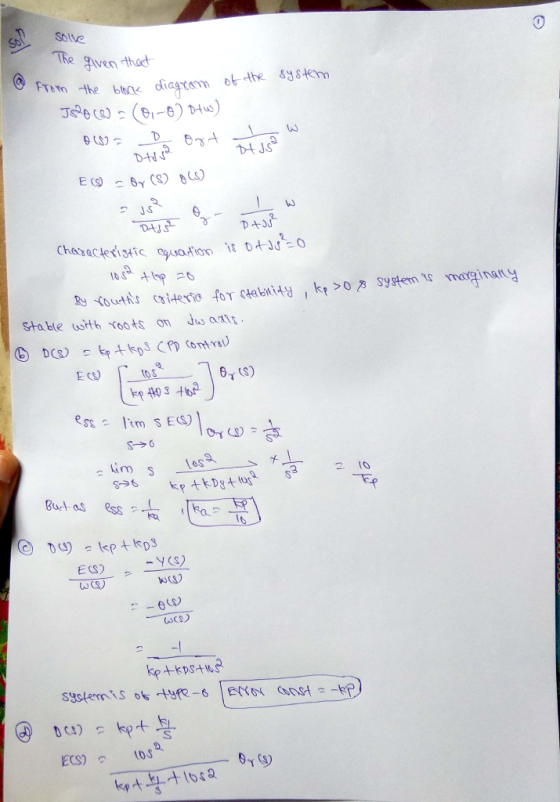
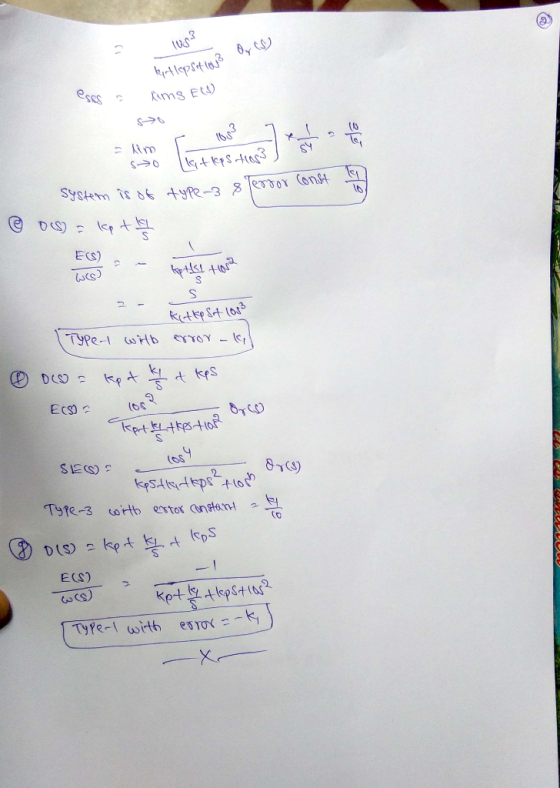
Please answer all the questions with MATLAB and also upload the code. Thanks. 3 Experiment - Matlab controller complexity and steady-state 3.1 Consider the satellite-attitude control problem shown in...
5 Problem 4.41 Consider the second-order plant with transfer function: 1 G(s) = (s1)(5s 1) and...
 5 Problem 4.41 Consider the second-order plant with transfer function: 1 G(s) = (s1)(5s 1) and in a unity feedback structure 1. Determine the system type and error constant with respect to tracking polynomial reference inputs of the system for P (i.e., De = kp), PD (i.e., Dc = kp+kps), and PID (i.e., De=kp +ki/s+ kps) controllers. Let kp = 19,ki 0.5,kp = 4/19. 2. Determine the system type and error constant of the system with respect to disturbance inputs...
5 Problem 4.41 Consider the second-order plant with transfer function: 1 G(s) = (s1)(5s 1) and in a unity feedback structure 1. Determine the system type and error constant with respect to tracking polynomial reference inputs of the system for P (i.e., De = kp), PD (i.e., Dc = kp+kps), and PID (i.e., De=kp +ki/s+ kps) controllers. Let kp = 19,ki 0.5,kp = 4/19. 2. Determine the system type and error constant of the system with respect to disturbance inputs...
Tutorial -On PID control (Control System: Instructor slides and lab) Consider a second order mass...
 part 2 & part 3 please...
Tutorial -On PID control (Control System: Instructor slides and lab) Consider a second order mass-force system to study its behavior under various forms of PID control xtn fon force In Disturbance force: 50) (i.e. wind force) Part I (dealing with the plant/process) 1. What is the model of this system, in other words, write the ODE of the system 2. Derive the transfer function of the above system from Fls) to X(s) 3. What...
part 2 & part 3 please...
Tutorial -On PID control (Control System: Instructor slides and lab) Consider a second order mass-force system to study its behavior under various forms of PID control xtn fon force In Disturbance force: 50) (i.e. wind force) Part I (dealing with the plant/process) 1. What is the model of this system, in other words, write the ODE of the system 2. Derive the transfer function of the above system from Fls) to X(s) 3. What...
please use MATLAB, screenshot the code and the plots. Answer all parts. Laboratory description: The speed...
 please use MATLAB, screenshot the code and the plots. Answer all
parts.
Laboratory description: The speed control of a high-speed train is represented by the system shown in Figure 1. The transfer function of the train dynamics is as follows. G(s) = 2 + 10s + 20 Laboratory assignment: Part A. For the open-loop system described by the following block diagram, assume that the input r(t) is a unit step. (1) Compute the steady-state system output Yss. (2) Find the...
please use MATLAB, screenshot the code and the plots. Answer all
parts.
Laboratory description: The speed control of a high-speed train is represented by the system shown in Figure 1. The transfer function of the train dynamics is as follows. G(s) = 2 + 10s + 20 Laboratory assignment: Part A. For the open-loop system described by the following block diagram, assume that the input r(t) is a unit step. (1) Compute the steady-state system output Yss. (2) Find the...
Problem 4 (25%) Consider the attitude control system of a rigid satellite shown in Figure 1.1....
 Problem 4 (25%) Consider the attitude control system of a rigid satellite shown in Figure 1.1. Fig. 1.1 Satellite tracking control system In this problem we will only consider the control of the angle e (angle of elevation). The dynamic model of the rigid satellite, rotating about an axis perpendicular to the page, can be approximately written as: JÖ = tm - ty - bė where ) is the satellite's moment of inertia, b is the damping coefficient, tm is...
Problem 4 (25%) Consider the attitude control system of a rigid satellite shown in Figure 1.1. Fig. 1.1 Satellite tracking control system In this problem we will only consider the control of the angle e (angle of elevation). The dynamic model of the rigid satellite, rotating about an axis perpendicular to the page, can be approximately written as: JÖ = tm - ty - bė where ) is the satellite's moment of inertia, b is the damping coefficient, tm is...
PLEASE DO IN MATLAB Problem 8 (PID feedback control). This problem is about Proportional-Integral-Derivative feedback control...
 PLEASE DO IN MATLAB
Problem 8 (PID feedback control). This problem is about Proportional-Integral-Derivative feedback control systems. The general setup of the system we are going to look at is given below: e(t) u(t) |C(s) y(t) P(s) r(t) Here the various signals are: signal/system r(t) y(t) e(t) P(s) C(s) и(t) meaning desired output signal actual output signal error signal r(t) y(t) Laplace transform of the (unstable) plant controller to be designed control signal Our goal is to design a controller...
PLEASE DO IN MATLAB
Problem 8 (PID feedback control). This problem is about Proportional-Integral-Derivative feedback control systems. The general setup of the system we are going to look at is given below: e(t) u(t) |C(s) y(t) P(s) r(t) Here the various signals are: signal/system r(t) y(t) e(t) P(s) C(s) и(t) meaning desired output signal actual output signal error signal r(t) y(t) Laplace transform of the (unstable) plant controller to be designed control signal Our goal is to design a controller...
control system System Description: The figure 1 and 2 below show, respectively, components and block diagram...
 control system
System Description: The figure 1 and 2 below show, respectively, components and block diagram of a motor and the measurements of velocity (via the tacho unit) and position (via the potentiometer). n represents the gearbox ratio between the rotating shaft and the output shaft. The left-hand side of the diagram represents the controller. A reference set point for the rotating shaft is entered in degrees and this is equivalent voltage. The error is calculated by subtracting the measured...
control system
System Description: The figure 1 and 2 below show, respectively, components and block diagram of a motor and the measurements of velocity (via the tacho unit) and position (via the potentiometer). n represents the gearbox ratio between the rotating shaft and the output shaft. The left-hand side of the diagram represents the controller. A reference set point for the rotating shaft is entered in degrees and this is equivalent voltage. The error is calculated by subtracting the measured...
MATLAB question. Please answer all the questions and also upload the code by MATLAB. Thanks. Down vote if no code provided. For the circuit shown above, at the moment t = 0, the switch is closed, fin...
 MATLAB question. Please answer all the questions and also upload
the code by MATLAB. Thanks. Down vote if no code provided.
For the circuit shown above, at the moment t = 0, the switch is closed, find w(t) for 120, No energy is stored in the capacitor and inductor at moment t-0 1. Write the dynamic model for RLC circuit after t> 0? a. Show all vour work and calculations b. Write down the characteristic equation of the transfer function...
MATLAB question. Please answer all the questions and also upload
the code by MATLAB. Thanks. Down vote if no code provided.
For the circuit shown above, at the moment t = 0, the switch is closed, find w(t) for 120, No energy is stored in the capacitor and inductor at moment t-0 1. Write the dynamic model for RLC circuit after t> 0? a. Show all vour work and calculations b. Write down the characteristic equation of the transfer function...
 5 Problem 4.41 Consider the second-order plant with transfer function: 1 G(s) = (s1)(5s 1) and in a unity feedback structure 1. Determine the system type and error constant with respect to tracking polynomial reference inputs of the system for P (i.e., De = kp), PD (i.e., Dc = kp+kps), and PID (i.e., De=kp +ki/s+ kps) controllers. Let kp = 19,ki 0.5,kp = 4/19. 2. Determine the system type and error constant of the system with respect to disturbance inputs...
5 Problem 4.41 Consider the second-order plant with transfer function: 1 G(s) = (s1)(5s 1) and in a unity feedback structure 1. Determine the system type and error constant with respect to tracking polynomial reference inputs of the system for P (i.e., De = kp), PD (i.e., Dc = kp+kps), and PID (i.e., De=kp +ki/s+ kps) controllers. Let kp = 19,ki 0.5,kp = 4/19. 2. Determine the system type and error constant of the system with respect to disturbance inputs...
 part 2 & part 3 please...
Tutorial -On PID control (Control System: Instructor slides and lab) Consider a second order mass-force system to study its behavior under various forms of PID control xtn fon force In Disturbance force: 50) (i.e. wind force) Part I (dealing with the plant/process) 1. What is the model of this system, in other words, write the ODE of the system 2. Derive the transfer function of the above system from Fls) to X(s) 3. What...
part 2 & part 3 please...
Tutorial -On PID control (Control System: Instructor slides and lab) Consider a second order mass-force system to study its behavior under various forms of PID control xtn fon force In Disturbance force: 50) (i.e. wind force) Part I (dealing with the plant/process) 1. What is the model of this system, in other words, write the ODE of the system 2. Derive the transfer function of the above system from Fls) to X(s) 3. What...
 please use MATLAB, screenshot the code and the plots. Answer all
parts.
Laboratory description: The speed control of a high-speed train is represented by the system shown in Figure 1. The transfer function of the train dynamics is as follows. G(s) = 2 + 10s + 20 Laboratory assignment: Part A. For the open-loop system described by the following block diagram, assume that the input r(t) is a unit step. (1) Compute the steady-state system output Yss. (2) Find the...
please use MATLAB, screenshot the code and the plots. Answer all
parts.
Laboratory description: The speed control of a high-speed train is represented by the system shown in Figure 1. The transfer function of the train dynamics is as follows. G(s) = 2 + 10s + 20 Laboratory assignment: Part A. For the open-loop system described by the following block diagram, assume that the input r(t) is a unit step. (1) Compute the steady-state system output Yss. (2) Find the...
 Problem 4 (25%) Consider the attitude control system of a rigid satellite shown in Figure 1.1. Fig. 1.1 Satellite tracking control system In this problem we will only consider the control of the angle e (angle of elevation). The dynamic model of the rigid satellite, rotating about an axis perpendicular to the page, can be approximately written as: JÖ = tm - ty - bė where ) is the satellite's moment of inertia, b is the damping coefficient, tm is...
Problem 4 (25%) Consider the attitude control system of a rigid satellite shown in Figure 1.1. Fig. 1.1 Satellite tracking control system In this problem we will only consider the control of the angle e (angle of elevation). The dynamic model of the rigid satellite, rotating about an axis perpendicular to the page, can be approximately written as: JÖ = tm - ty - bė where ) is the satellite's moment of inertia, b is the damping coefficient, tm is...
 PLEASE DO IN MATLAB
Problem 8 (PID feedback control). This problem is about Proportional-Integral-Derivative feedback control systems. The general setup of the system we are going to look at is given below: e(t) u(t) |C(s) y(t) P(s) r(t) Here the various signals are: signal/system r(t) y(t) e(t) P(s) C(s) и(t) meaning desired output signal actual output signal error signal r(t) y(t) Laplace transform of the (unstable) plant controller to be designed control signal Our goal is to design a controller...
PLEASE DO IN MATLAB
Problem 8 (PID feedback control). This problem is about Proportional-Integral-Derivative feedback control systems. The general setup of the system we are going to look at is given below: e(t) u(t) |C(s) y(t) P(s) r(t) Here the various signals are: signal/system r(t) y(t) e(t) P(s) C(s) и(t) meaning desired output signal actual output signal error signal r(t) y(t) Laplace transform of the (unstable) plant controller to be designed control signal Our goal is to design a controller...
 control system
System Description: The figure 1 and 2 below show, respectively, components and block diagram of a motor and the measurements of velocity (via the tacho unit) and position (via the potentiometer). n represents the gearbox ratio between the rotating shaft and the output shaft. The left-hand side of the diagram represents the controller. A reference set point for the rotating shaft is entered in degrees and this is equivalent voltage. The error is calculated by subtracting the measured...
control system
System Description: The figure 1 and 2 below show, respectively, components and block diagram of a motor and the measurements of velocity (via the tacho unit) and position (via the potentiometer). n represents the gearbox ratio between the rotating shaft and the output shaft. The left-hand side of the diagram represents the controller. A reference set point for the rotating shaft is entered in degrees and this is equivalent voltage. The error is calculated by subtracting the measured...
 MATLAB question. Please answer all the questions and also upload
the code by MATLAB. Thanks. Down vote if no code provided.
For the circuit shown above, at the moment t = 0, the switch is closed, find w(t) for 120, No energy is stored in the capacitor and inductor at moment t-0 1. Write the dynamic model for RLC circuit after t> 0? a. Show all vour work and calculations b. Write down the characteristic equation of the transfer function...
MATLAB question. Please answer all the questions and also upload
the code by MATLAB. Thanks. Down vote if no code provided.
For the circuit shown above, at the moment t = 0, the switch is closed, find w(t) for 120, No energy is stored in the capacitor and inductor at moment t-0 1. Write the dynamic model for RLC circuit after t> 0? a. Show all vour work and calculations b. Write down the characteristic equation of the transfer function...
Most questions answered within 3 hours.
-
26) Briefly describe, using words or simple diagrams, the
chemiosmotic theory for coupling oxidation to phosphorylation...
asked 1 hour ago -
Suppose that XX is a random variable with mean 16 and standard
deviation 5 . Also...
asked 2 hours ago -
Calculate the number density of argon gas at a temperature of
24C and a pressure of...
asked 5 hours ago -
Alternative
Classification
How to Estimate
Probabilities from Data? ( For continuous Attributes)
And How to generate...
asked 5 hours ago -
An explosion breaks a 20.0-kg object into three parts. The
object is initially moving at a...
asked 6 hours ago -
Calculate the approximate number of residues of Rubisco, which
is involved in carbon fixation in plants,...
asked 7 hours ago -
Other decisions about scientific claims can have a much broader
impact.ENERGYarrow-10x10.png, environment, health, security - all...
asked 8 hours ago -
I need to write a research paper and work cited about this
topic: The United States...
asked 8 hours ago -
Hello! I was wondering if I could have some help?
If the vapor pressure of carvone...
asked 8 hours ago -
An economist wants to estimate the mean per capita income (in
thousands of dollars) for a...
asked 9 hours ago -
What would be the input/output characteristic of a circuit
obtained by putting two of your 2's-complementers...
asked 9 hours ago -
In Drosophila, the transition from the syncytial blastoderm
stage to the cellular blastoderm stage is a...
asked 9 hours ago