
Homework Answers
Add Answer to:
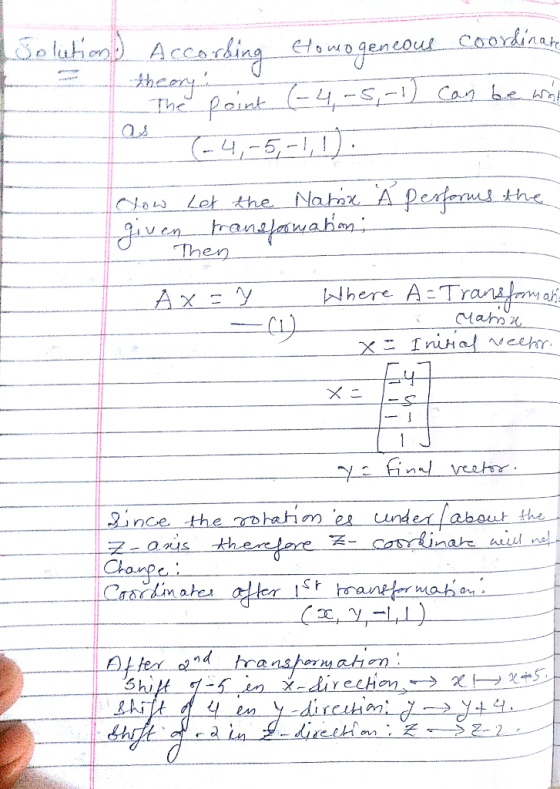
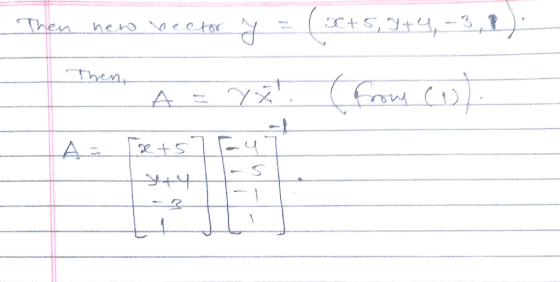
1 point) Using homogeneous coordinates, the matrix A which rotates the point (-4,-5,-1) about the...
(1 point) Using homogeneous coordinates, the matrix A which reflects the point (5,-4,-1) across t...
 (1 point) Using homogeneous coordinates, the matrix A which reflects the point (5,-4,-1) across the x- axis, shifts the result by 1 in the x-direction, -1 in the y-direction, and -1 in the z-direction, and then expands the y coordinate by a factor of 5 is given by A= The image of (5,-4,-1) under this transformation is , and Z =
(1 point) Using homogeneous coordinates, the matrix A which reflects the point (5,-4,-1) across the x- axis, shifts the...
(1 point) Using homogeneous coordinates, the matrix A which reflects the point (5,-4,-1) across the x- axis, shifts the result by 1 in the x-direction, -1 in the y-direction, and -1 in the z-direction, and then expands the y coordinate by a factor of 5 is given by A= The image of (5,-4,-1) under this transformation is , and Z =
(1 point) Using homogeneous coordinates, the matrix A which reflects the point (5,-4,-1) across the x- axis, shifts the...
Problem 3. Construct a single 2 x 2 matrix which defines the transformation on R?, and...
 Problem 3. Construct a single 2 x 2 matrix which defines the transformation on R?, and find the image of the point C) under the transformation. a. A transformation which moves points to one quarter of their original distance to the origin. b. A transformation which first rotates points counterclockwise through an angle 31/2, then reflects them across the y-axis. A transformation which first reflects points across the y-axis, then rotates them counterclockwise through an angle 31/2.
Problem 3. Construct a single 2 x 2 matrix which defines the transformation on R?, and find the image of the point C) under the transformation. a. A transformation which moves points to one quarter of their original distance to the origin. b. A transformation which first rotates points counterclockwise through an angle 31/2, then reflects them across the y-axis. A transformation which first reflects points across the y-axis, then rotates them counterclockwise through an angle 31/2.
4. (22 points) Let To : R2 R2 be the linear transformation that rotates each point in IR2 about the origin through an angle of θ (with counterclockwise corresponding to a positive angle), and let T,p...
 4. (22 points) Let To : R2 R2 be the linear transformation that rotates each point in IR2 about the origin through an angle of θ (with counterclockwise corresponding to a positive angle), and let T,p : R2 → R2 be defined similarly for the angle φ. (a) (8 points) Find the standard matrices for the linear transformations To and To. That is, let A be the matrix associated with Tip, and let B be the matrix associated with To....
4. (22 points) Let To : R2 R2 be the linear transformation that rotates each point in IR2 about the origin through an angle of θ (with counterclockwise corresponding to a positive angle), and let T,p : R2 → R2 be defined similarly for the angle φ. (a) (8 points) Find the standard matrices for the linear transformations To and To. That is, let A be the matrix associated with Tip, and let B be the matrix associated with To....
(1 point) Match each linear transformation with its matrix. A. Contraction by a factor of2 B. Rotation through an angle of 90 in the clockwise direction C. Projection onto the y-axis D. Reflection in...
 (1 point) Match each linear transformation with its matrix. A. Contraction by a factor of2 B. Rotation through an angle of 90 in the clockwise direction C. Projection onto the y-axis D. Reflection in the y-axis E. Rotation through an angle of 90° in the counterclockwise direction -1 0 0.5 0 0 0.5 0 -1 F. Reflection in the r-axis 0 -1
(1 point) Match each linear transformation with its matrix. A. Contraction by a factor of2 B. Rotation through...
(1 point) Match each linear transformation with its matrix. A. Contraction by a factor of2 B. Rotation through an angle of 90 in the clockwise direction C. Projection onto the y-axis D. Reflection in the y-axis E. Rotation through an angle of 90° in the counterclockwise direction -1 0 0.5 0 0 0.5 0 -1 F. Reflection in the r-axis 0 -1
(1 point) Match each linear transformation with its matrix. A. Contraction by a factor of2 B. Rotation through...
Let T : R2 → R2 be the linear transformation given by T(v) = Av that consists of a counterclockwise rotation about the origin through an angle of 30 2, Find the matrix that produces a countercloc...
 Let T : R2 → R2 be the linear transformation given by T(v) = Av that consists of a counterclockwise rotation about the origin through an angle of 30 2, Find the matrix that produces a counterclockwise rotation about the origin through an angle of 30°. Be sure to give the EXACT value of each entry in A. a. b. Plot the parallelogram whose vertices are given by the points A(0, 0), B(4, 0), C(5, 3), and D 1, 3)...
Let T : R2 → R2 be the linear transformation given by T(v) = Av that consists of a counterclockwise rotation about the origin through an angle of 30 2, Find the matrix that produces a counterclockwise rotation about the origin through an angle of 30°. Be sure to give the EXACT value of each entry in A. a. b. Plot the parallelogram whose vertices are given by the points A(0, 0), B(4, 0), C(5, 3), and D 1, 3)...
Calculate the concatenated transformation matrix for the following operations performed in the sequence as below: Translation...
Calculate the concatenated transformation matrix for the following operations performed in the sequence as below: Translation by 4 and 5 units along X and Y axis Change of scale by 2 units in X direction and 4 units in Y direction iii Rotation by 60° in CCW direction about Z axis passing through the point (4, 4). Find new coordinates when the transformation is carried out on a triangle ABC with A (4, 4), B (8, 4) and C (6,...
3. (a) (3 marks) If multiplication by matrix A rotates a vector v in the x-y...
 3. (a) (3 marks) If multiplication by matrix A rotates a vector v in the x-y plane through an angle 0, what is the effect of multiplying v by A?. (b) (3 marks) Describe the geometric effect of multiplying a vector x by the following matrix (cos0 – sin? 0 -2 sin 0 cos 0 ) | 2 sin 6 cos sin0 – cosa e ) (c) (4 marks) In three dimensional space, find a matrix that rotates a vector...
3. (a) (3 marks) If multiplication by matrix A rotates a vector v in the x-y plane through an angle 0, what is the effect of multiplying v by A?. (b) (3 marks) Describe the geometric effect of multiplying a vector x by the following matrix (cos0 – sin? 0 -2 sin 0 cos 0 ) | 2 sin 6 cos sin0 – cosa e ) (c) (4 marks) In three dimensional space, find a matrix that rotates a vector...
LINEAR ALGEBRA: PLEASE FOLLOW THE COMMENT and please tell me what is the rotate matrix and...
 LINEAR ALGEBRA: PLEASE FOLLOW THE COMMENT and please
tell me what is the rotate matrix and why there is cos@ and -sin@ i
think it should be cos@ and sin@ on the first row
For each of the following linear operators on R2,
find the matrix representation of the transformation
with respect to the homogeneous coordinate
system:
(a) The transformation L that rotates each vector
by 120◦ in the counterclockwise direction
(b) The transformation L that translates each point
3...
LINEAR ALGEBRA: PLEASE FOLLOW THE COMMENT and please
tell me what is the rotate matrix and why there is cos@ and -sin@ i
think it should be cos@ and sin@ on the first row
For each of the following linear operators on R2,
find the matrix representation of the transformation
with respect to the homogeneous coordinate
system:
(a) The transformation L that rotates each vector
by 120◦ in the counterclockwise direction
(b) The transformation L that translates each point
3...
2 Homogeneous coordinates Recall that an affine function is of the form f^x) Mx + t for a matrix M and vector t. Homoge...
 2 Homogeneous coordinates Recall that an affine function is of the form f^x) Mx + t for a matrix M and vector t. Homogeneous coordinates are frequently used to represent affine functions in robotics and 3D graphics. We define the function H by and if f-x) Mxtt where then C0 a. Some vectors are valid homogeneous representations of vectors, and some are not. Explain how to tell if some vector y-0 is the homogeneous representation of some other vector -y...
2 Homogeneous coordinates Recall that an affine function is of the form f^x) Mx + t for a matrix M and vector t. Homogeneous coordinates are frequently used to represent affine functions in robotics and 3D graphics. We define the function H by and if f-x) Mxtt where then C0 a. Some vectors are valid homogeneous representations of vectors, and some are not. Explain how to tell if some vector y-0 is the homogeneous representation of some other vector -y...
The cylinder rotates about the fixed z-axis in the direction indicated. If the speed of point...
 The cylinder rotates about the fixed z-axis in the
direction indicated. If the speed of point A is
vA = 3.3 ft/sec and the magnitude of its
acceleration is aA = 50.6 ft/sec2,
determine the magnitudes of the angular velocity and angular
acceleration of the cylinder. Is knowledge of the angle θ
necessary?
y -- TO 4" А * Incorrect Find the magnitude of the angular acceleration of the disk. 235.34 Answer: a = rad/sec the tolerance is +/-2%
The cylinder rotates about the fixed z-axis in the
direction indicated. If the speed of point A is
vA = 3.3 ft/sec and the magnitude of its
acceleration is aA = 50.6 ft/sec2,
determine the magnitudes of the angular velocity and angular
acceleration of the cylinder. Is knowledge of the angle θ
necessary?
y -- TO 4" А * Incorrect Find the magnitude of the angular acceleration of the disk. 235.34 Answer: a = rad/sec the tolerance is +/-2%
 (1 point) Using homogeneous coordinates, the matrix A which reflects the point (5,-4,-1) across the x- axis, shifts the result by 1 in the x-direction, -1 in the y-direction, and -1 in the z-direction, and then expands the y coordinate by a factor of 5 is given by A= The image of (5,-4,-1) under this transformation is , and Z =
(1 point) Using homogeneous coordinates, the matrix A which reflects the point (5,-4,-1) across the x- axis, shifts the...
(1 point) Using homogeneous coordinates, the matrix A which reflects the point (5,-4,-1) across the x- axis, shifts the result by 1 in the x-direction, -1 in the y-direction, and -1 in the z-direction, and then expands the y coordinate by a factor of 5 is given by A= The image of (5,-4,-1) under this transformation is , and Z =
(1 point) Using homogeneous coordinates, the matrix A which reflects the point (5,-4,-1) across the x- axis, shifts the...
 Problem 3. Construct a single 2 x 2 matrix which defines the transformation on R?, and find the image of the point C) under the transformation. a. A transformation which moves points to one quarter of their original distance to the origin. b. A transformation which first rotates points counterclockwise through an angle 31/2, then reflects them across the y-axis. A transformation which first reflects points across the y-axis, then rotates them counterclockwise through an angle 31/2.
Problem 3. Construct a single 2 x 2 matrix which defines the transformation on R?, and find the image of the point C) under the transformation. a. A transformation which moves points to one quarter of their original distance to the origin. b. A transformation which first rotates points counterclockwise through an angle 31/2, then reflects them across the y-axis. A transformation which first reflects points across the y-axis, then rotates them counterclockwise through an angle 31/2.
 4. (22 points) Let To : R2 R2 be the linear transformation that rotates each point in IR2 about the origin through an angle of θ (with counterclockwise corresponding to a positive angle), and let T,p : R2 → R2 be defined similarly for the angle φ. (a) (8 points) Find the standard matrices for the linear transformations To and To. That is, let A be the matrix associated with Tip, and let B be the matrix associated with To....
4. (22 points) Let To : R2 R2 be the linear transformation that rotates each point in IR2 about the origin through an angle of θ (with counterclockwise corresponding to a positive angle), and let T,p : R2 → R2 be defined similarly for the angle φ. (a) (8 points) Find the standard matrices for the linear transformations To and To. That is, let A be the matrix associated with Tip, and let B be the matrix associated with To....
 (1 point) Match each linear transformation with its matrix. A. Contraction by a factor of2 B. Rotation through an angle of 90 in the clockwise direction C. Projection onto the y-axis D. Reflection in the y-axis E. Rotation through an angle of 90° in the counterclockwise direction -1 0 0.5 0 0 0.5 0 -1 F. Reflection in the r-axis 0 -1
(1 point) Match each linear transformation with its matrix. A. Contraction by a factor of2 B. Rotation through...
(1 point) Match each linear transformation with its matrix. A. Contraction by a factor of2 B. Rotation through an angle of 90 in the clockwise direction C. Projection onto the y-axis D. Reflection in the y-axis E. Rotation through an angle of 90° in the counterclockwise direction -1 0 0.5 0 0 0.5 0 -1 F. Reflection in the r-axis 0 -1
(1 point) Match each linear transformation with its matrix. A. Contraction by a factor of2 B. Rotation through...
 Let T : R2 → R2 be the linear transformation given by T(v) = Av that consists of a counterclockwise rotation about the origin through an angle of 30 2, Find the matrix that produces a counterclockwise rotation about the origin through an angle of 30°. Be sure to give the EXACT value of each entry in A. a. b. Plot the parallelogram whose vertices are given by the points A(0, 0), B(4, 0), C(5, 3), and D 1, 3)...
Let T : R2 → R2 be the linear transformation given by T(v) = Av that consists of a counterclockwise rotation about the origin through an angle of 30 2, Find the matrix that produces a counterclockwise rotation about the origin through an angle of 30°. Be sure to give the EXACT value of each entry in A. a. b. Plot the parallelogram whose vertices are given by the points A(0, 0), B(4, 0), C(5, 3), and D 1, 3)...
 3. (a) (3 marks) If multiplication by matrix A rotates a vector v in the x-y plane through an angle 0, what is the effect of multiplying v by A?. (b) (3 marks) Describe the geometric effect of multiplying a vector x by the following matrix (cos0 – sin? 0 -2 sin 0 cos 0 ) | 2 sin 6 cos sin0 – cosa e ) (c) (4 marks) In three dimensional space, find a matrix that rotates a vector...
3. (a) (3 marks) If multiplication by matrix A rotates a vector v in the x-y plane through an angle 0, what is the effect of multiplying v by A?. (b) (3 marks) Describe the geometric effect of multiplying a vector x by the following matrix (cos0 – sin? 0 -2 sin 0 cos 0 ) | 2 sin 6 cos sin0 – cosa e ) (c) (4 marks) In three dimensional space, find a matrix that rotates a vector...
 LINEAR ALGEBRA: PLEASE FOLLOW THE COMMENT and please
tell me what is the rotate matrix and why there is cos@ and -sin@ i
think it should be cos@ and sin@ on the first row
For each of the following linear operators on R2,
find the matrix representation of the transformation
with respect to the homogeneous coordinate
system:
(a) The transformation L that rotates each vector
by 120◦ in the counterclockwise direction
(b) The transformation L that translates each point
3...
LINEAR ALGEBRA: PLEASE FOLLOW THE COMMENT and please
tell me what is the rotate matrix and why there is cos@ and -sin@ i
think it should be cos@ and sin@ on the first row
For each of the following linear operators on R2,
find the matrix representation of the transformation
with respect to the homogeneous coordinate
system:
(a) The transformation L that rotates each vector
by 120◦ in the counterclockwise direction
(b) The transformation L that translates each point
3...
 2 Homogeneous coordinates Recall that an affine function is of the form f^x) Mx + t for a matrix M and vector t. Homogeneous coordinates are frequently used to represent affine functions in robotics and 3D graphics. We define the function H by and if f-x) Mxtt where then C0 a. Some vectors are valid homogeneous representations of vectors, and some are not. Explain how to tell if some vector y-0 is the homogeneous representation of some other vector -y...
2 Homogeneous coordinates Recall that an affine function is of the form f^x) Mx + t for a matrix M and vector t. Homogeneous coordinates are frequently used to represent affine functions in robotics and 3D graphics. We define the function H by and if f-x) Mxtt where then C0 a. Some vectors are valid homogeneous representations of vectors, and some are not. Explain how to tell if some vector y-0 is the homogeneous representation of some other vector -y...
 The cylinder rotates about the fixed z-axis in the
direction indicated. If the speed of point A is
vA = 3.3 ft/sec and the magnitude of its
acceleration is aA = 50.6 ft/sec2,
determine the magnitudes of the angular velocity and angular
acceleration of the cylinder. Is knowledge of the angle θ
necessary?
y -- TO 4" А * Incorrect Find the magnitude of the angular acceleration of the disk. 235.34 Answer: a = rad/sec the tolerance is +/-2%
The cylinder rotates about the fixed z-axis in the
direction indicated. If the speed of point A is
vA = 3.3 ft/sec and the magnitude of its
acceleration is aA = 50.6 ft/sec2,
determine the magnitudes of the angular velocity and angular
acceleration of the cylinder. Is knowledge of the angle θ
necessary?
y -- TO 4" А * Incorrect Find the magnitude of the angular acceleration of the disk. 235.34 Answer: a = rad/sec the tolerance is +/-2%
Most questions answered within 3 hours.
-
Which has the highest energy photons in each pair? a. light with
a wavelength of 5x10^3m...
asked 54 seconds ago -
1. When a TLC plate was developed, detection by UV
light showed a single spot at the...
asked 2 minutes ago -
What is the source of information from natural materials which
can be used to reconstruct climate...
asked 17 minutes ago -
The International Monetary Fund (IMF) has hired you as an
economist. Your assignment is to travel...
asked 21 minutes ago -
Brief Exercise 12-65
Profitability Ratios
Tinker Corporation operates in the highly competitive consulting
industry. Tinker's balance...
asked 47 minutes ago -
Consider Lewin's three-step process. Which of the three steps do
you thin would be hardest to...
asked 47 minutes ago -
A disabled tanker leaks kerosene (n = 1.20) into the
Persian Gulf, creating a large slick...
asked 1 hour ago -
5. Explain the condition for a DC motor to develop the
maximum power. If a DC...
asked 1 hour ago -
Compute the p[Ag] after 35.00 mL of 0.1 M silver nitrate has been
added to the...
asked 1 hour ago -
Walgreen Company (NYSE: WAG) is currently trading at $48.50 on
the NYSE. Walgreen Company is also...
asked 1 hour ago -
Based on historical data, your team knows what proportion of the
company's orders come from Males...
asked 1 hour ago -
8. Which of the following atoms has the largest magnitude
electron affinity?
(a) Sodium (Na)
(b)...
asked 1 hour ago