
Homework Answers


Matlab code:
clc;clear all;close all;
k=1;
num=[1 0 0];
denum=[1,0,10,50];
sys=tf(num,denum)
rlocus(sys)
grid on
Output:

Add Answer to:
Sketch the root locus as K varies from 0 Koo 2A unity feedback system has a loop transfer functio...
[7] Sketch the root locus for the unity feedback system whose open loop transfer function is K G(s) Draw the root locus...
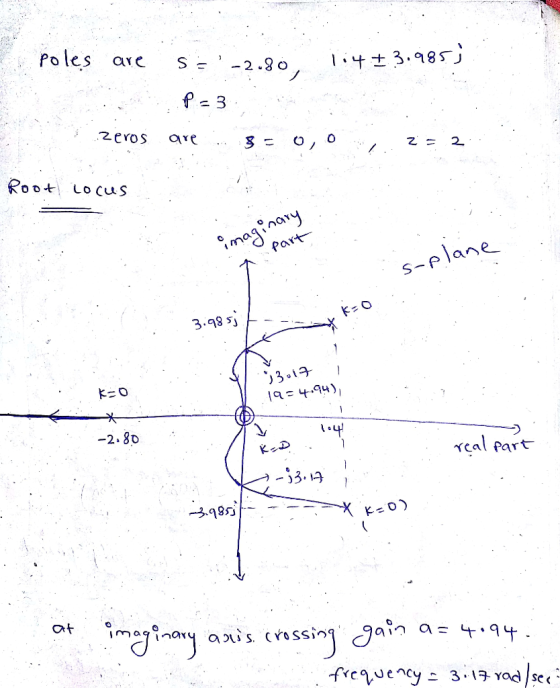
 [7] Sketch the root locus for the unity feedback system whose open loop transfer function is K G(s) Draw the root locus of the system with the gain K as a variable s(s+4) (s2+4s+20)' Determine asymptotes, centroid,, breakaway point, angle of departure, and the gain at which root locus crosses jw -axis.
[7] Sketch the root locus for the unity feedback system whose open loop transfer function is K G(s) Draw the root locus of the system with the gain...
[7] Sketch the root locus for the unity feedback system whose open loop transfer function is K G(s) Draw the root locus of the system with the gain K as a variable s(s+4) (s2+4s+20)' Determine asymptotes, centroid,, breakaway point, angle of departure, and the gain at which root locus crosses jw -axis.
[7] Sketch the root locus for the unity feedback system whose open loop transfer function is K G(s) Draw the root locus of the system with the gain...
Sketch the root locus plot of a unity feedback system with an open loop transfer function...
Sketch the root locus plot of a unity feedback system with an open loop transfer function G(s) = K / s (s+2) (s+4) Determine the value of K so that the dominant pair of complex poles of the system has a damping ratio of 0.5.
[7] Sketch the root locus for the unity feedback system whose open loop transfer function is K G(s) Draw the root lo...
 [7] Sketch the root locus for the unity feedback system whose open loop transfer function is K G(s) Draw the root locus of the system with the gain Kas a variable. s(s+4) (s2+4s+20) Determine asymptotes, centroid, breakaway point, angle of departure, and the gain at which root locus crosses ja-axis. A control system with type-0 process and a PID controller is shown below. Design the [8 parameters of the PID controller so that the following specifications are satisfied. =100 a)...
[7] Sketch the root locus for the unity feedback system whose open loop transfer function is K G(s) Draw the root locus of the system with the gain Kas a variable. s(s+4) (s2+4s+20) Determine asymptotes, centroid, breakaway point, angle of departure, and the gain at which root locus crosses ja-axis. A control system with type-0 process and a PID controller is shown below. Design the [8 parameters of the PID controller so that the following specifications are satisfied. =100 a)...
Sketch the root locus of the unity feedback system with the transfer function, G(s) = [10...
 Sketch the root locus of the unity feedback system with the transfer function, G(s) = [10 marks] (s+1)(s+2)(s+3)(s+4) and C(s) = k.
Sketch the root locus of the unity feedback system with the transfer function, G(s) = [10 marks] (s+1)(s+2)(s+3)(s+4) and C(s) = k.
1 Sketch the root locus for the unity feedback systems that have an open-loop transfer function...
 1 Sketch the root locus for the unity feedback systems that have an open-loop transfer function of: 6. G(S) = k(s? +1) (s - 1)(8 + 2)(8+3)
1 Sketch the root locus for the unity feedback systems that have an open-loop transfer function of: 6. G(S) = k(s? +1) (s - 1)(8 + 2)(8+3)
Lectures 15-18: Root-locus method 5.1 Sketch the root locus for a unity feedback system with the ...
 help on #5.2
L(s) is loop transfer function
1+L(s) = 0
lecture notes:
Lectures 15-18: Root-locus method 5.1 Sketch the root locus for a unity feedback system with the loop transfer function (8+5(+10) .2 +10+20 where K, T, and a are nonnegative parameters. For each case summarize your results in a table similar to the one provided below. Root locus parameters Open loop poles Open loop zeros Number of zeros at infinity Number of branches Number of asymptotes Center of...
help on #5.2
L(s) is loop transfer function
1+L(s) = 0
lecture notes:
Lectures 15-18: Root-locus method 5.1 Sketch the root locus for a unity feedback system with the loop transfer function (8+5(+10) .2 +10+20 where K, T, and a are nonnegative parameters. For each case summarize your results in a table similar to the one provided below. Root locus parameters Open loop poles Open loop zeros Number of zeros at infinity Number of branches Number of asymptotes Center of...
Q1. Show analytically that the Root Locus for the unity feedback system with open loop transfer f...
 Q1. Show analytically that the Root Locus for the unity feedback system with open loop transfer function: (a) [10 marks] K(s 4) (s + 2) is a circle, and find the centre and the radius. Determine the minimum value of the damping ratio and the corresponding value of K (b) The root locus of the open loop transfer function: [10 marks] s(s26s +15) is depicted in Figure Q1(b). Find the minimum value of gain K that will render the system...
Q1. Show analytically that the Root Locus for the unity feedback system with open loop transfer function: (a) [10 marks] K(s 4) (s + 2) is a circle, and find the centre and the radius. Determine the minimum value of the damping ratio and the corresponding value of K (b) The root locus of the open loop transfer function: [10 marks] s(s26s +15) is depicted in Figure Q1(b). Find the minimum value of gain K that will render the system...
A robot force control system with unity feedback has a loop transfer function [6 7.11 Tood transf...
 A robot force control system with unity feedback has a loop transfer function [6 7.11 Tood transfer function (6l K(s +2.5) (s2 + 2s 2) (s2 + 4s + 5) (a) Find the gain K that results in dominant roots with a damping ratio of 0.707. Sketch the root locus. (b) Find the actual percent overshoot and peak time for the gain K of part (a)
A robot force control system with unity feedback has a loop transfer function [6...
A robot force control system with unity feedback has a loop transfer function [6 7.11 Tood transfer function (6l K(s +2.5) (s2 + 2s 2) (s2 + 4s + 5) (a) Find the gain K that results in dominant roots with a damping ratio of 0.707. Sketch the root locus. (b) Find the actual percent overshoot and peak time for the gain K of part (a)
A robot force control system with unity feedback has a loop transfer function [6...
7. Consider a unity feedback control system with open-loop transfer function G(s) = k 5 s...
 7. Consider a unity feedback control system with open-loop transfer function G(s) = k 5 s + 2)(52 + 4s + 5) Find the value of gain K > 0 for which the root locus crosses the imaginary axis.
7. Consider a unity feedback control system with open-loop transfer function G(s) = k 5 s + 2)(52 + 4s + 5) Find the value of gain K > 0 for which the root locus crosses the imaginary axis.
4. (20%) For the unity-feedback system whose feedforward transfer function is K(sub) i K>0, b>a >...
 4. (20%) For the unity-feedback system whose feedforward transfer function is K(sub) i K>0, b>a > 3 (s + a)(s* +45 + 5) (a) (10%) Sketch the root-locus plot. (b) (5%) Determine center and angle of asymptotes. (c) (5%) If a > 0 and b>0, what is the constraint on values of a and b to guarantee that the closed-loop system is stable?
4. (20%) For the unity-feedback system whose feedforward transfer function is K(sub) i K>0, b>a > 3 (s + a)(s* +45 + 5) (a) (10%) Sketch the root-locus plot. (b) (5%) Determine center and angle of asymptotes. (c) (5%) If a > 0 and b>0, what is the constraint on values of a and b to guarantee that the closed-loop system is stable?
 [7] Sketch the root locus for the unity feedback system whose open loop transfer function is K G(s) Draw the root locus of the system with the gain K as a variable s(s+4) (s2+4s+20)' Determine asymptotes, centroid,, breakaway point, angle of departure, and the gain at which root locus crosses jw -axis.
[7] Sketch the root locus for the unity feedback system whose open loop transfer function is K G(s) Draw the root locus of the system with the gain...
[7] Sketch the root locus for the unity feedback system whose open loop transfer function is K G(s) Draw the root locus of the system with the gain K as a variable s(s+4) (s2+4s+20)' Determine asymptotes, centroid,, breakaway point, angle of departure, and the gain at which root locus crosses jw -axis.
[7] Sketch the root locus for the unity feedback system whose open loop transfer function is K G(s) Draw the root locus of the system with the gain...
 [7] Sketch the root locus for the unity feedback system whose open loop transfer function is K G(s) Draw the root locus of the system with the gain Kas a variable. s(s+4) (s2+4s+20) Determine asymptotes, centroid, breakaway point, angle of departure, and the gain at which root locus crosses ja-axis. A control system with type-0 process and a PID controller is shown below. Design the [8 parameters of the PID controller so that the following specifications are satisfied. =100 a)...
[7] Sketch the root locus for the unity feedback system whose open loop transfer function is K G(s) Draw the root locus of the system with the gain Kas a variable. s(s+4) (s2+4s+20) Determine asymptotes, centroid, breakaway point, angle of departure, and the gain at which root locus crosses ja-axis. A control system with type-0 process and a PID controller is shown below. Design the [8 parameters of the PID controller so that the following specifications are satisfied. =100 a)...
 Sketch the root locus of the unity feedback system with the transfer function, G(s) = [10 marks] (s+1)(s+2)(s+3)(s+4) and C(s) = k.
Sketch the root locus of the unity feedback system with the transfer function, G(s) = [10 marks] (s+1)(s+2)(s+3)(s+4) and C(s) = k.
 1 Sketch the root locus for the unity feedback systems that have an open-loop transfer function of: 6. G(S) = k(s? +1) (s - 1)(8 + 2)(8+3)
1 Sketch the root locus for the unity feedback systems that have an open-loop transfer function of: 6. G(S) = k(s? +1) (s - 1)(8 + 2)(8+3)
 help on #5.2
L(s) is loop transfer function
1+L(s) = 0
lecture notes:
Lectures 15-18: Root-locus method 5.1 Sketch the root locus for a unity feedback system with the loop transfer function (8+5(+10) .2 +10+20 where K, T, and a are nonnegative parameters. For each case summarize your results in a table similar to the one provided below. Root locus parameters Open loop poles Open loop zeros Number of zeros at infinity Number of branches Number of asymptotes Center of...
help on #5.2
L(s) is loop transfer function
1+L(s) = 0
lecture notes:
Lectures 15-18: Root-locus method 5.1 Sketch the root locus for a unity feedback system with the loop transfer function (8+5(+10) .2 +10+20 where K, T, and a are nonnegative parameters. For each case summarize your results in a table similar to the one provided below. Root locus parameters Open loop poles Open loop zeros Number of zeros at infinity Number of branches Number of asymptotes Center of...
 Q1. Show analytically that the Root Locus for the unity feedback system with open loop transfer function: (a) [10 marks] K(s 4) (s + 2) is a circle, and find the centre and the radius. Determine the minimum value of the damping ratio and the corresponding value of K (b) The root locus of the open loop transfer function: [10 marks] s(s26s +15) is depicted in Figure Q1(b). Find the minimum value of gain K that will render the system...
Q1. Show analytically that the Root Locus for the unity feedback system with open loop transfer function: (a) [10 marks] K(s 4) (s + 2) is a circle, and find the centre and the radius. Determine the minimum value of the damping ratio and the corresponding value of K (b) The root locus of the open loop transfer function: [10 marks] s(s26s +15) is depicted in Figure Q1(b). Find the minimum value of gain K that will render the system...
 A robot force control system with unity feedback has a loop transfer function [6 7.11 Tood transfer function (6l K(s +2.5) (s2 + 2s 2) (s2 + 4s + 5) (a) Find the gain K that results in dominant roots with a damping ratio of 0.707. Sketch the root locus. (b) Find the actual percent overshoot and peak time for the gain K of part (a)
A robot force control system with unity feedback has a loop transfer function [6...
A robot force control system with unity feedback has a loop transfer function [6 7.11 Tood transfer function (6l K(s +2.5) (s2 + 2s 2) (s2 + 4s + 5) (a) Find the gain K that results in dominant roots with a damping ratio of 0.707. Sketch the root locus. (b) Find the actual percent overshoot and peak time for the gain K of part (a)
A robot force control system with unity feedback has a loop transfer function [6...
 7. Consider a unity feedback control system with open-loop transfer function G(s) = k 5 s + 2)(52 + 4s + 5) Find the value of gain K > 0 for which the root locus crosses the imaginary axis.
7. Consider a unity feedback control system with open-loop transfer function G(s) = k 5 s + 2)(52 + 4s + 5) Find the value of gain K > 0 for which the root locus crosses the imaginary axis.
 4. (20%) For the unity-feedback system whose feedforward transfer function is K(sub) i K>0, b>a > 3 (s + a)(s* +45 + 5) (a) (10%) Sketch the root-locus plot. (b) (5%) Determine center and angle of asymptotes. (c) (5%) If a > 0 and b>0, what is the constraint on values of a and b to guarantee that the closed-loop system is stable?
4. (20%) For the unity-feedback system whose feedforward transfer function is K(sub) i K>0, b>a > 3 (s + a)(s* +45 + 5) (a) (10%) Sketch the root-locus plot. (b) (5%) Determine center and angle of asymptotes. (c) (5%) If a > 0 and b>0, what is the constraint on values of a and b to guarantee that the closed-loop system is stable?
Most questions answered within 3 hours.
-
a) Draw two water molecules.
b) Clearly name and label the type of bond that exists...
asked 41 minutes ago -
C - Language
Write a loop that sets each array element to the sum of itself...
asked 1 hour ago -
(63
#14)
which of the following statments best describes how chamging
the concentration of the substances...
asked 5 hours ago -
In the following reaction, which element is undergoing
oxidation: Na2SO3 + N2O --> N2 + Na2SO4...
asked 6 hours ago -
Which of the following pairs of ions have the same electron
configuration?
I: Br− and Se2−...
asked 8 hours ago -
The Foremost Composite Materials Company is planning a two-day
sales conference for October 19-20. The conference...
asked 9 hours ago -
3) Illustrate the observed pattern of relatedness of organisms
versus adaptations to specific conditions. This means...
asked 9 hours ago -
In winter a lake has a 0.35 m thick ice layer over 1.10 m of
water....
asked 10 hours ago -
Assuming the following has been encrypted with a Vigenere cipher
below, use the method(s) and assumptions...
asked 10 hours ago -
How would I use switch statements to write a program that will
take an input of...
asked 10 hours ago -
Imagine a reaction in which methane gas combusts at a constant
pressure of 1 atm and...
asked 10 hours ago -
Two parallel wires (each 12 m in length) are separated by a
distance of 0.065 m...
asked 10 hours ago