
Homework Answers

Add Answer to:
A robot force control system with unity feedback has a loop transfer function [6 7.11 Tood transf...
Question# 1 (25 points) For a unity feedback system with open loop transfer function K(s+10)(s+20) (s+30)(s2-20s+2...
 Question# 1 (25 points) For a unity feedback system with open loop transfer function K(s+10)(s+20) (s+30)(s2-20s+200) G(s) = Do the following using Matlab: a) Sketch the root locus. b) Find the range of gain, K that makes the system stable c) Find the value of K that yields a damping ratio of 0.707 for the system's closed-loop dominant poles. d) Obtain Ts, Tp, %OS for the closed loop system in part c). e) Find the value of K that yields...
Question# 1 (25 points) For a unity feedback system with open loop transfer function K(s+10)(s+20) (s+30)(s2-20s+200) G(s) = Do the following using Matlab: a) Sketch the root locus. b) Find the range of gain, K that makes the system stable c) Find the value of K that yields a damping ratio of 0.707 for the system's closed-loop dominant poles. d) Obtain Ts, Tp, %OS for the closed loop system in part c). e) Find the value of K that yields...
[7] Sketch the root locus for the unity feedback system whose open loop transfer function is K G(s) Draw the root locus...
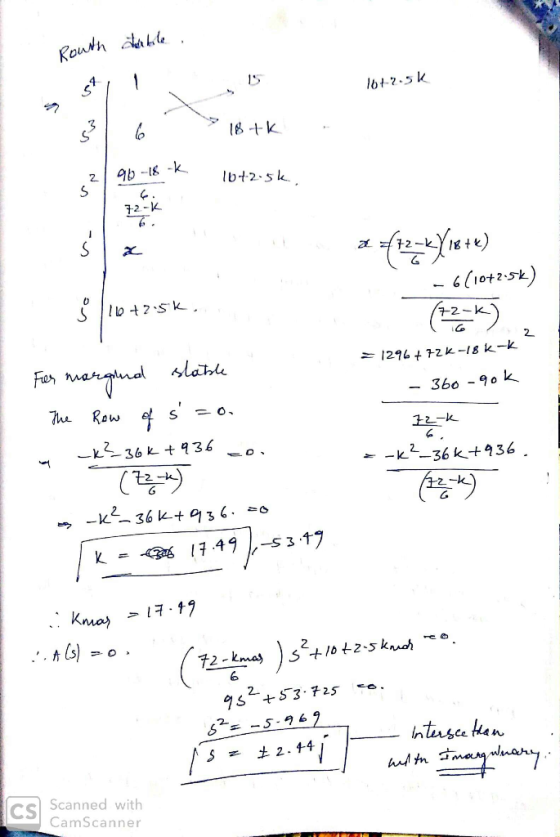
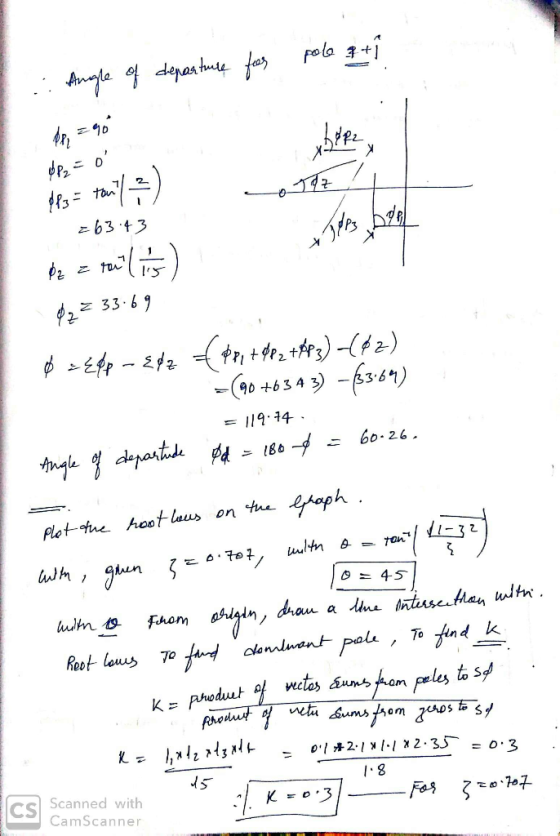
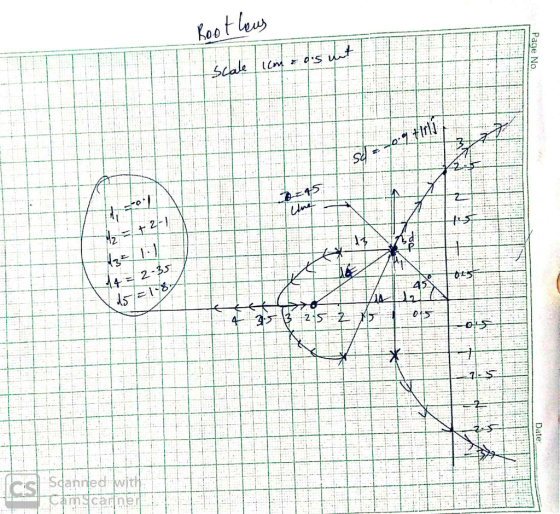
 [7] Sketch the root locus for the unity feedback system whose open loop transfer function is K G(s) Draw the root locus of the system with the gain K as a variable s(s+4) (s2+4s+20)' Determine asymptotes, centroid,, breakaway point, angle of departure, and the gain at which root locus crosses jw -axis.
[7] Sketch the root locus for the unity feedback system whose open loop transfer function is K G(s) Draw the root locus of the system with the gain...
[7] Sketch the root locus for the unity feedback system whose open loop transfer function is K G(s) Draw the root locus of the system with the gain K as a variable s(s+4) (s2+4s+20)' Determine asymptotes, centroid,, breakaway point, angle of departure, and the gain at which root locus crosses jw -axis.
[7] Sketch the root locus for the unity feedback system whose open loop transfer function is K G(s) Draw the root locus of the system with the gain...
Sketch the root locus plot of a unity feedback system with an open loop transfer function...
Sketch the root locus plot of a unity feedback system with an open loop transfer function G(s) = K / s (s+2) (s+4) Determine the value of K so that the dominant pair of complex poles of the system has a damping ratio of 0.5.
[7] Sketch the root locus for the unity feedback system whose open loop transfer function is K G(s) Draw the root lo...
 [7] Sketch the root locus for the unity feedback system whose open loop transfer function is K G(s) Draw the root locus of the system with the gain Kas a variable. s(s+4) (s2+4s+20) Determine asymptotes, centroid, breakaway point, angle of departure, and the gain at which root locus crosses ja-axis. A control system with type-0 process and a PID controller is shown below. Design the [8 parameters of the PID controller so that the following specifications are satisfied. =100 a)...
[7] Sketch the root locus for the unity feedback system whose open loop transfer function is K G(s) Draw the root locus of the system with the gain Kas a variable. s(s+4) (s2+4s+20) Determine asymptotes, centroid, breakaway point, angle of departure, and the gain at which root locus crosses ja-axis. A control system with type-0 process and a PID controller is shown below. Design the [8 parameters of the PID controller so that the following specifications are satisfied. =100 a)...
7. Consider a unity feedback control system with open-loop transfer function G(s) = k 5 s...
 7. Consider a unity feedback control system with open-loop transfer function G(s) = k 5 s + 2)(52 + 4s + 5) Find the value of gain K > 0 for which the root locus crosses the imaginary axis.
7. Consider a unity feedback control system with open-loop transfer function G(s) = k 5 s + 2)(52 + 4s + 5) Find the value of gain K > 0 for which the root locus crosses the imaginary axis.
Q1. Show analytically that the Root Locus for the unity feedback system with open loop transfer f...
 Q1. Show analytically that the Root Locus for the unity feedback system with open loop transfer function: (a) [10 marks] K(s 4) (s + 2) is a circle, and find the centre and the radius. Determine the minimum value of the damping ratio and the corresponding value of K (b) The root locus of the open loop transfer function: [10 marks] s(s26s +15) is depicted in Figure Q1(b). Find the minimum value of gain K that will render the system...
Q1. Show analytically that the Root Locus for the unity feedback system with open loop transfer function: (a) [10 marks] K(s 4) (s + 2) is a circle, and find the centre and the radius. Determine the minimum value of the damping ratio and the corresponding value of K (b) The root locus of the open loop transfer function: [10 marks] s(s26s +15) is depicted in Figure Q1(b). Find the minimum value of gain K that will render the system...
The open loop transfer function of a unity negative feedback system is given by : G(s)...
 3. The open loop transfer function of a unity feedback system is given by \(G(S)=\frac{K}{S(1+S T)}\) Where Tand \(\mathrm{K}\) are constants having positive values. By what factor the amplifier gain be reduced so that (a) peak overshoot of unit step response of the system is reduced from \(75 \%\) to \(25 \% .\) b) The damping ratio increases from \(0.1\) to \(0.6\).
3. The open loop transfer function of a unity feedback system is given by \(G(S)=\frac{K}{S(1+S T)}\) Where Tand \(\mathrm{K}\) are constants having positive values. By what factor the amplifier gain be reduced so that (a) peak overshoot of unit step response of the system is reduced from \(75 \%\) to \(25 \% .\) b) The damping ratio increases from \(0.1\) to \(0.6\).
Sketch the root locus as K varies from 0 Koo 2A unity feedback system has a loop transfer functio...
 Sketch the root locus as K varies from 0 Koo 2A unity feedback system has a loop transfer function 10 (s + 5) (s + a) し(s) = Gc(s)G(s) = . Sketch the root locus for 0 s a o0
Sketch the root locus as K varies from 0 Koo 2A unity feedback system has a loop transfer function 10 (s + 5) (s + a) し(s) = Gc(s)G(s) = . Sketch the root locus for 0 s a o0
Sketch the root locus as K varies from 0 Koo 2A unity feedback system has a loop transfer function 10 (s + 5) (s + a) し(s) = Gc(s)G(s) = . Sketch the root locus for 0 s a o0
Sketch the root locus as K varies from 0 Koo 2A unity feedback system has a loop transfer function 10 (s + 5) (s + a) し(s) = Gc(s)G(s) = . Sketch the root locus for 0 s a o0
Due Date: April 20, 2 Problem 2: Consider a unity-feedback control system with the following open-loop...
 Due Date: April 20, 2 Problem 2: Consider a unity-feedback control system with the following open-loop transfer function: K G(s)H(s) = s(s2 + 4s + 8) 1. Sketch the root-locus plot. 2. IfK 2, where are the closed-loop poles located? 3. If x = 0.5, where are the closed-loop poles located?
Due Date: April 20, 2 Problem 2: Consider a unity-feedback control system with the following open-loop transfer function: K G(s)H(s) = s(s2 + 4s + 8) 1. Sketch the root-locus plot. 2. IfK 2, where are the closed-loop poles located? 3. If x = 0.5, where are the closed-loop poles located?
Problem 3 A unity feedback system has the loop transfer function G(s) = Kata) s(s +...
 Problem 3 A unity feedback system has the loop transfer function G(s) = Kata) s(s + (a) Find the breakway and entry points on the real axis. (b) Find the gain and the roots when the real part of the complex roots is located at -2 (c) Sketch the root locus. Problem 4 The forward path G(s) of a unity feedback system with input R(s) and output Y (s) is given by G(o) 106I) (a) What is the type of...
Problem 3 A unity feedback system has the loop transfer function G(s) = Kata) s(s + (a) Find the breakway and entry points on the real axis. (b) Find the gain and the roots when the real part of the complex roots is located at -2 (c) Sketch the root locus. Problem 4 The forward path G(s) of a unity feedback system with input R(s) and output Y (s) is given by G(o) 106I) (a) What is the type of...
 Question# 1 (25 points) For a unity feedback system with open loop transfer function K(s+10)(s+20) (s+30)(s2-20s+200) G(s) = Do the following using Matlab: a) Sketch the root locus. b) Find the range of gain, K that makes the system stable c) Find the value of K that yields a damping ratio of 0.707 for the system's closed-loop dominant poles. d) Obtain Ts, Tp, %OS for the closed loop system in part c). e) Find the value of K that yields...
Question# 1 (25 points) For a unity feedback system with open loop transfer function K(s+10)(s+20) (s+30)(s2-20s+200) G(s) = Do the following using Matlab: a) Sketch the root locus. b) Find the range of gain, K that makes the system stable c) Find the value of K that yields a damping ratio of 0.707 for the system's closed-loop dominant poles. d) Obtain Ts, Tp, %OS for the closed loop system in part c). e) Find the value of K that yields...
 [7] Sketch the root locus for the unity feedback system whose open loop transfer function is K G(s) Draw the root locus of the system with the gain K as a variable s(s+4) (s2+4s+20)' Determine asymptotes, centroid,, breakaway point, angle of departure, and the gain at which root locus crosses jw -axis.
[7] Sketch the root locus for the unity feedback system whose open loop transfer function is K G(s) Draw the root locus of the system with the gain...
[7] Sketch the root locus for the unity feedback system whose open loop transfer function is K G(s) Draw the root locus of the system with the gain K as a variable s(s+4) (s2+4s+20)' Determine asymptotes, centroid,, breakaway point, angle of departure, and the gain at which root locus crosses jw -axis.
[7] Sketch the root locus for the unity feedback system whose open loop transfer function is K G(s) Draw the root locus of the system with the gain...
 [7] Sketch the root locus for the unity feedback system whose open loop transfer function is K G(s) Draw the root locus of the system with the gain Kas a variable. s(s+4) (s2+4s+20) Determine asymptotes, centroid, breakaway point, angle of departure, and the gain at which root locus crosses ja-axis. A control system with type-0 process and a PID controller is shown below. Design the [8 parameters of the PID controller so that the following specifications are satisfied. =100 a)...
[7] Sketch the root locus for the unity feedback system whose open loop transfer function is K G(s) Draw the root locus of the system with the gain Kas a variable. s(s+4) (s2+4s+20) Determine asymptotes, centroid, breakaway point, angle of departure, and the gain at which root locus crosses ja-axis. A control system with type-0 process and a PID controller is shown below. Design the [8 parameters of the PID controller so that the following specifications are satisfied. =100 a)...
 7. Consider a unity feedback control system with open-loop transfer function G(s) = k 5 s + 2)(52 + 4s + 5) Find the value of gain K > 0 for which the root locus crosses the imaginary axis.
7. Consider a unity feedback control system with open-loop transfer function G(s) = k 5 s + 2)(52 + 4s + 5) Find the value of gain K > 0 for which the root locus crosses the imaginary axis.
 Q1. Show analytically that the Root Locus for the unity feedback system with open loop transfer function: (a) [10 marks] K(s 4) (s + 2) is a circle, and find the centre and the radius. Determine the minimum value of the damping ratio and the corresponding value of K (b) The root locus of the open loop transfer function: [10 marks] s(s26s +15) is depicted in Figure Q1(b). Find the minimum value of gain K that will render the system...
Q1. Show analytically that the Root Locus for the unity feedback system with open loop transfer function: (a) [10 marks] K(s 4) (s + 2) is a circle, and find the centre and the radius. Determine the minimum value of the damping ratio and the corresponding value of K (b) The root locus of the open loop transfer function: [10 marks] s(s26s +15) is depicted in Figure Q1(b). Find the minimum value of gain K that will render the system...
 3. The open loop transfer function of a unity feedback system is given by \(G(S)=\frac{K}{S(1+S T)}\) Where Tand \(\mathrm{K}\) are constants having positive values. By what factor the amplifier gain be reduced so that (a) peak overshoot of unit step response of the system is reduced from \(75 \%\) to \(25 \% .\) b) The damping ratio increases from \(0.1\) to \(0.6\).
3. The open loop transfer function of a unity feedback system is given by \(G(S)=\frac{K}{S(1+S T)}\) Where Tand \(\mathrm{K}\) are constants having positive values. By what factor the amplifier gain be reduced so that (a) peak overshoot of unit step response of the system is reduced from \(75 \%\) to \(25 \% .\) b) The damping ratio increases from \(0.1\) to \(0.6\).
 Sketch the root locus as K varies from 0 Koo 2A unity feedback system has a loop transfer function 10 (s + 5) (s + a) し(s) = Gc(s)G(s) = . Sketch the root locus for 0 s a o0
Sketch the root locus as K varies from 0 Koo 2A unity feedback system has a loop transfer function 10 (s + 5) (s + a) し(s) = Gc(s)G(s) = . Sketch the root locus for 0 s a o0
Sketch the root locus as K varies from 0 Koo 2A unity feedback system has a loop transfer function 10 (s + 5) (s + a) し(s) = Gc(s)G(s) = . Sketch the root locus for 0 s a o0
Sketch the root locus as K varies from 0 Koo 2A unity feedback system has a loop transfer function 10 (s + 5) (s + a) し(s) = Gc(s)G(s) = . Sketch the root locus for 0 s a o0
 Due Date: April 20, 2 Problem 2: Consider a unity-feedback control system with the following open-loop transfer function: K G(s)H(s) = s(s2 + 4s + 8) 1. Sketch the root-locus plot. 2. IfK 2, where are the closed-loop poles located? 3. If x = 0.5, where are the closed-loop poles located?
Due Date: April 20, 2 Problem 2: Consider a unity-feedback control system with the following open-loop transfer function: K G(s)H(s) = s(s2 + 4s + 8) 1. Sketch the root-locus plot. 2. IfK 2, where are the closed-loop poles located? 3. If x = 0.5, where are the closed-loop poles located?
 Problem 3 A unity feedback system has the loop transfer function G(s) = Kata) s(s + (a) Find the breakway and entry points on the real axis. (b) Find the gain and the roots when the real part of the complex roots is located at -2 (c) Sketch the root locus. Problem 4 The forward path G(s) of a unity feedback system with input R(s) and output Y (s) is given by G(o) 106I) (a) What is the type of...
Problem 3 A unity feedback system has the loop transfer function G(s) = Kata) s(s + (a) Find the breakway and entry points on the real axis. (b) Find the gain and the roots when the real part of the complex roots is located at -2 (c) Sketch the root locus. Problem 4 The forward path G(s) of a unity feedback system with input R(s) and output Y (s) is given by G(o) 106I) (a) What is the type of...
Most questions answered within 3 hours.
-
The blues made its way into many kinds of music. Eric Clapton,
The Beatles, and Elvis...
asked 6 minutes ago -
If you’re standing at the bottom of a hill and asked to evaluate
it while being...
asked 1 hour ago -
1. Which region has taken the lead in the world of
e-waste handling?
a) European Union...
asked 55 minutes ago -
A 8.15- g bullet from a 9-mm pistol has a velocity of 366.0 m/s.
It strikes...
asked 2 hours ago -
The outstanding bonds of Alpha Extracts have a yield to maturity
of 7.4 percent and a...
asked 2 hours ago -
The Problem: The Case of the Harmonizing Vacations
Your CEO is exploring partnering with a European...
asked 3 hours ago -
A chemical equation is balanced by adding coefficients in front
of some formulas so that the...
asked 3 hours ago -
From the literature (reference your sources): What are the
lattice parameters of calcite and aragonite? Why...
asked 4 hours ago -
Your system is rejecting the question am asking which is
preceded by a case study. It...
asked 4 hours ago -
3. On January 2, 2000, Larry creates a trust with himself as
trustee. Larry as trustee...
asked 4 hours ago -
A member of the volleyball team spikes the ball. During this
process, she changes the velocity...
asked 4 hours ago -
Are adult gamers less likely to use a gaming console (Xbox,
PlayStation, Wii, etc...) than teen...
asked 5 hours ago