
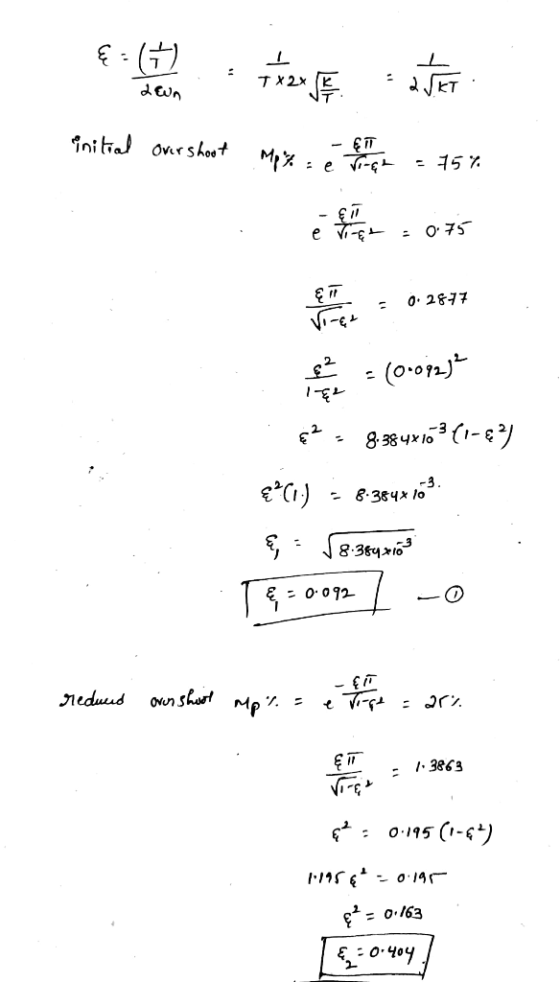
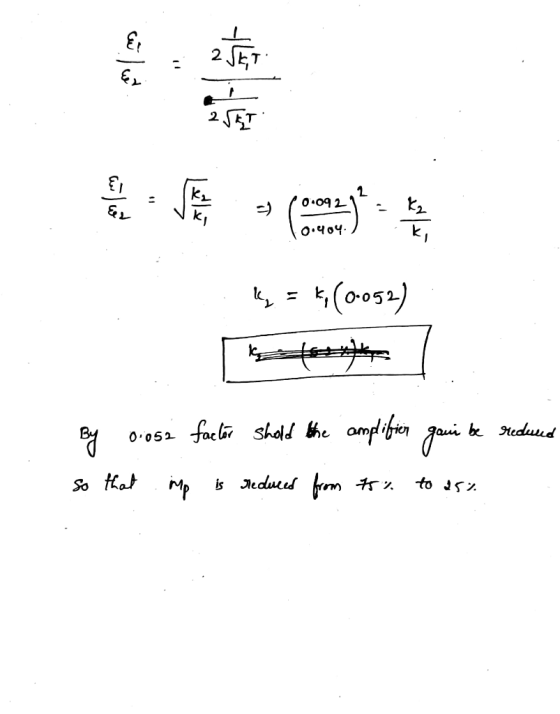
3. The open loop transfer function of a unity feedback system is given by \(G(S)=\frac{K}{S(1+S T)}\) Where T
and \(\mathrm{K}\) are constants having positive values. By what factor the amplifier gain be reduced so that (a) peak overshoot of unit step response of the system is reduced from \(75 \%\) to \(25 \% .\) b) The damping ratio increases from \(0.1\) to \(0.6\).
Homework Answers

Add Answer to:
The open loop transfer function of a unity negative feedback system is given by : G(s)...
Not all second-order systems are designed to give a standard 2"d order response. Consider the pow...
 Not all second-order systems are designed to give a standard 2"d order response. Consider the power steering for an automobile. The feedback system can be modeled as the block diagram shown in the figure below. For a unit step input A(s), find values of K1 and K2 for which the response w(t) is critically damped and has a steady-state gain of 0.4 unit. Repeat for a damping ratio of 0.7 and a steady-state gain of 0.2 unit. 7) Control Steering...
Not all second-order systems are designed to give a standard 2"d order response. Consider the power steering for an automobile. The feedback system can be modeled as the block diagram shown in the figure below. For a unit step input A(s), find values of K1 and K2 for which the response w(t) is critically damped and has a steady-state gain of 0.4 unit. Repeat for a damping ratio of 0.7 and a steady-state gain of 0.2 unit. 7) Control Steering...
A unity gain negative feedback system has an open-loop transfer function given by 4. s) =...
 A unity gain negative feedback system has an open-loop transfer function given by 4. s) = s(1 + 10s)(1 + 10s)? Draw a Bode diagram for this system and determine the loop gain K required for a phase margin of 20 deg. What is the gain margin? 5. We are given the closed-loop transfer function 10(s + 1) T(s) = 82+98+10 for a "unity feedback" system and asked to find the open-loop transfer function, generate a log-magnitude-phase plot for both...
A unity gain negative feedback system has an open-loop transfer function given by 4. s) = s(1 + 10s)(1 + 10s)? Draw a Bode diagram for this system and determine the loop gain K required for a phase margin of 20 deg. What is the gain margin? 5. We are given the closed-loop transfer function 10(s + 1) T(s) = 82+98+10 for a "unity feedback" system and asked to find the open-loop transfer function, generate a log-magnitude-phase plot for both...
A robot force control system with unity feedback has a loop transfer function [6 7.11 Tood transf...
 A robot force control system with unity feedback has a loop transfer function [6 7.11 Tood transfer function (6l K(s +2.5) (s2 + 2s 2) (s2 + 4s + 5) (a) Find the gain K that results in dominant roots with a damping ratio of 0.707. Sketch the root locus. (b) Find the actual percent overshoot and peak time for the gain K of part (a)
A robot force control system with unity feedback has a loop transfer function [6...
A robot force control system with unity feedback has a loop transfer function [6 7.11 Tood transfer function (6l K(s +2.5) (s2 + 2s 2) (s2 + 4s + 5) (a) Find the gain K that results in dominant roots with a damping ratio of 0.707. Sketch the root locus. (b) Find the actual percent overshoot and peak time for the gain K of part (a)
A robot force control system with unity feedback has a loop transfer function [6...
3. The open-loop transfer function of a unity feedback system is GS) ss+2) The desired system...
 3. The open-loop transfer function of a unity feedback system is GS) ss+2) The desired system response to a step input is specified as peak time t,-1 sec and overshoot M,-5% Determine whether both specifications can be met simultaneously by selecting the right value of K
3. The open-loop transfer function of a unity feedback system is GS) ss+2) The desired system response to a step input is specified as peak time t,-1 sec and overshoot M,-5% Determine whether both specifications can be met simultaneously by selecting the right value of K
The open-loop transfer function of a unity feedback system is G(s) The desired system response to a step input is specified as peak time tp = 1 sec and overshoot 5%
;The open-loop transfer function of a unity feedback system is G(s)=K/ s(s+a) The desired system response to a step input is specified as peak time tp = 1 sec and overshoot 5%G(s)=K/s(s+a) overshoot(Mp)= 5%tp=1sec(a)find K and a help me plz!!!!!
The open-loop transfer function of a unity feedback system is G(s) The desired system response to a step input is specified as peak time tp = 1 sec and overshoot 5%
The open-loop transfer function of a unity feedback system is G(s)=K/ s(s+a) The desired system response to a step input is specified as peak time tp = 1 sec and overshoot 5%G(s)=K/s(s+a) overshoot(Mp)= 5%tp=1sec(a)find K and a help me plz!!!!!!
please solve If a system has the open-loop transfer function G(s) s(s+25n) with unity feedback, then the closed-loop tr...
 please solve
If a system has the open-loop transfer function G(s) s(s+25n) with unity feedback, then the closed-loop transfer function is given b T(s) s2+20ns+wf Verify the values of the PM shown in Fig. 6.36 for = 0.1,0.4, and 0.7. Figure 6.36 Damping ratio versus 1.0 0.8 PM 2 0.6 0,4 0.2 0 0° 10° 20° 30° 40° 50 60° 70° 80° Phase margin Damping ratio,
If a system has the open-loop transfer function G(s) s(s+25n) with unity feedback, then...
please solve
If a system has the open-loop transfer function G(s) s(s+25n) with unity feedback, then the closed-loop transfer function is given b T(s) s2+20ns+wf Verify the values of the PM shown in Fig. 6.36 for = 0.1,0.4, and 0.7. Figure 6.36 Damping ratio versus 1.0 0.8 PM 2 0.6 0,4 0.2 0 0° 10° 20° 30° 40° 50 60° 70° 80° Phase margin Damping ratio,
If a system has the open-loop transfer function G(s) s(s+25n) with unity feedback, then...
!!!!The open-loop transfer function of a unity feedback system is G(s) The desired system response to a step input is specified as peak time tp = 1 sec and overshoot 5%
The open-loop transfer function of a unity feedback system is G(s)=K/ s(s+a) The desired system response to a step input is specified as peak time tp = 1 sec and overshoot Mp = 5% (a) Determine whether both specifications can be met simultaneously by selecting the right value of K and a
crismalonThe open-loop transfer function of a unity feedback system is G(s) The desired system response to a step input is specified as peak time tp = 1 sec and overshoot 5%
The open-loop transfer function of a unity feedback system is G(s)=K/ s(s+a) The desired system response to a step input is specified as peak time tp = 1 sec and overshoot Mp = 5% (a) Determine whether both specifications can be met simultaneously by selecting the right value of K and a
K and consider a PI s+4 A unity feedback system has an open loop transfer function G(s) [4] S+a controller Ge(s) S Sele...
 K and consider a PI s+4 A unity feedback system has an open loop transfer function G(s) [4] S+a controller Ge(s) S Select the values of K and a to achieve a) (i) Peak overshoot of about 20% (ii) Settling time (2% bases) ~ 1 sec b) For the values of K and a found in part (a), calculate the unit ramp input steady state error
K and consider a PI s+4 A unity feedback system has an open loop...
K and consider a PI s+4 A unity feedback system has an open loop transfer function G(s) [4] S+a controller Ge(s) S Select the values of K and a to achieve a) (i) Peak overshoot of about 20% (ii) Settling time (2% bases) ~ 1 sec b) For the values of K and a found in part (a), calculate the unit ramp input steady state error
K and consider a PI s+4 A unity feedback system has an open loop...
 Not all second-order systems are designed to give a standard 2"d order response. Consider the power steering for an automobile. The feedback system can be modeled as the block diagram shown in the figure below. For a unit step input A(s), find values of K1 and K2 for which the response w(t) is critically damped and has a steady-state gain of 0.4 unit. Repeat for a damping ratio of 0.7 and a steady-state gain of 0.2 unit. 7) Control Steering...
Not all second-order systems are designed to give a standard 2"d order response. Consider the power steering for an automobile. The feedback system can be modeled as the block diagram shown in the figure below. For a unit step input A(s), find values of K1 and K2 for which the response w(t) is critically damped and has a steady-state gain of 0.4 unit. Repeat for a damping ratio of 0.7 and a steady-state gain of 0.2 unit. 7) Control Steering...
 A unity gain negative feedback system has an open-loop transfer function given by 4. s) = s(1 + 10s)(1 + 10s)? Draw a Bode diagram for this system and determine the loop gain K required for a phase margin of 20 deg. What is the gain margin? 5. We are given the closed-loop transfer function 10(s + 1) T(s) = 82+98+10 for a "unity feedback" system and asked to find the open-loop transfer function, generate a log-magnitude-phase plot for both...
A unity gain negative feedback system has an open-loop transfer function given by 4. s) = s(1 + 10s)(1 + 10s)? Draw a Bode diagram for this system and determine the loop gain K required for a phase margin of 20 deg. What is the gain margin? 5. We are given the closed-loop transfer function 10(s + 1) T(s) = 82+98+10 for a "unity feedback" system and asked to find the open-loop transfer function, generate a log-magnitude-phase plot for both...
 A robot force control system with unity feedback has a loop transfer function [6 7.11 Tood transfer function (6l K(s +2.5) (s2 + 2s 2) (s2 + 4s + 5) (a) Find the gain K that results in dominant roots with a damping ratio of 0.707. Sketch the root locus. (b) Find the actual percent overshoot and peak time for the gain K of part (a)
A robot force control system with unity feedback has a loop transfer function [6...
A robot force control system with unity feedback has a loop transfer function [6 7.11 Tood transfer function (6l K(s +2.5) (s2 + 2s 2) (s2 + 4s + 5) (a) Find the gain K that results in dominant roots with a damping ratio of 0.707. Sketch the root locus. (b) Find the actual percent overshoot and peak time for the gain K of part (a)
A robot force control system with unity feedback has a loop transfer function [6...
 3. The open-loop transfer function of a unity feedback system is GS) ss+2) The desired system response to a step input is specified as peak time t,-1 sec and overshoot M,-5% Determine whether both specifications can be met simultaneously by selecting the right value of K
3. The open-loop transfer function of a unity feedback system is GS) ss+2) The desired system response to a step input is specified as peak time t,-1 sec and overshoot M,-5% Determine whether both specifications can be met simultaneously by selecting the right value of K
 please solve
If a system has the open-loop transfer function G(s) s(s+25n) with unity feedback, then the closed-loop transfer function is given b T(s) s2+20ns+wf Verify the values of the PM shown in Fig. 6.36 for = 0.1,0.4, and 0.7. Figure 6.36 Damping ratio versus 1.0 0.8 PM 2 0.6 0,4 0.2 0 0° 10° 20° 30° 40° 50 60° 70° 80° Phase margin Damping ratio,
If a system has the open-loop transfer function G(s) s(s+25n) with unity feedback, then...
please solve
If a system has the open-loop transfer function G(s) s(s+25n) with unity feedback, then the closed-loop transfer function is given b T(s) s2+20ns+wf Verify the values of the PM shown in Fig. 6.36 for = 0.1,0.4, and 0.7. Figure 6.36 Damping ratio versus 1.0 0.8 PM 2 0.6 0,4 0.2 0 0° 10° 20° 30° 40° 50 60° 70° 80° Phase margin Damping ratio,
If a system has the open-loop transfer function G(s) s(s+25n) with unity feedback, then...
 K and consider a PI s+4 A unity feedback system has an open loop transfer function G(s) [4] S+a controller Ge(s) S Select the values of K and a to achieve a) (i) Peak overshoot of about 20% (ii) Settling time (2% bases) ~ 1 sec b) For the values of K and a found in part (a), calculate the unit ramp input steady state error
K and consider a PI s+4 A unity feedback system has an open loop...
K and consider a PI s+4 A unity feedback system has an open loop transfer function G(s) [4] S+a controller Ge(s) S Select the values of K and a to achieve a) (i) Peak overshoot of about 20% (ii) Settling time (2% bases) ~ 1 sec b) For the values of K and a found in part (a), calculate the unit ramp input steady state error
K and consider a PI s+4 A unity feedback system has an open loop...
Most questions answered within 3 hours.
-
A college student is employed as a door-to-door newspaper
salesman. Historical data suggests that the student...
asked 45 minutes ago -
MATLAB HW 11 problem using Switch Case and Input commands
Write a script file that calculates...
asked 30 minutes ago -
Considering gravitational time dilation, calculate the time that
passes in Earth’s surface while 1 hour passes...
asked 1 hour ago -
Minitab Problem: Take the Lake Hume June rainfall data and find
use the processes outlined in...
asked 2 hours ago -
X Company is trying to decide whether to continue using old
equipment to make Product A...
asked 2 hours ago -
IN PYTHON ONLY !! Program 2: Re-work
program #5 (WeeklyHours) from the previous assignment such that...
asked 2 hours ago -
The average length of time between arrivals at a turnpike
toll-booth is 26 seconds. What is...
asked 4 hours ago -
(a) A piston at 6.1 atm contains a gas that occupies a volume of
3.5 L....
asked 5 hours ago -
Please answer true or false. Words
cannot be changed or added in to make it true...
asked 5 hours ago -
An empty test tube weighs 15.923 grams. Then,
MgCl2•6H2O is added into the test tube. After...
asked 5 hours ago -
Assume memory access is 10 units of time and disk access is
10000 units of time....
asked 5 hours ago -
1. Are all good samples random?
2. Magazines often report surveys giving statistics such as “63%...
asked 6 hours ago