
Homework Answers

Add Answer to:
Not all second-order systems are designed to give a standard 2"d order response. Consider the pow...
please solve this with detailed description 7 Not all second-order systems are designed to give a...
 please solve this with detailed description
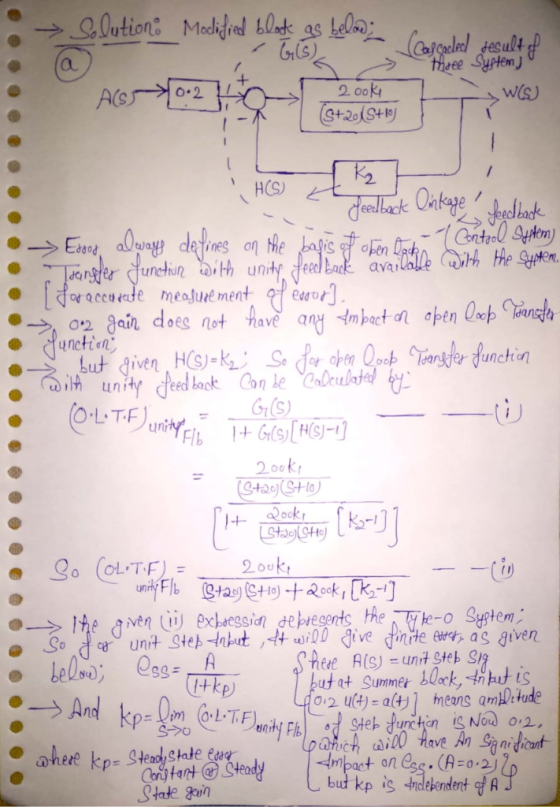
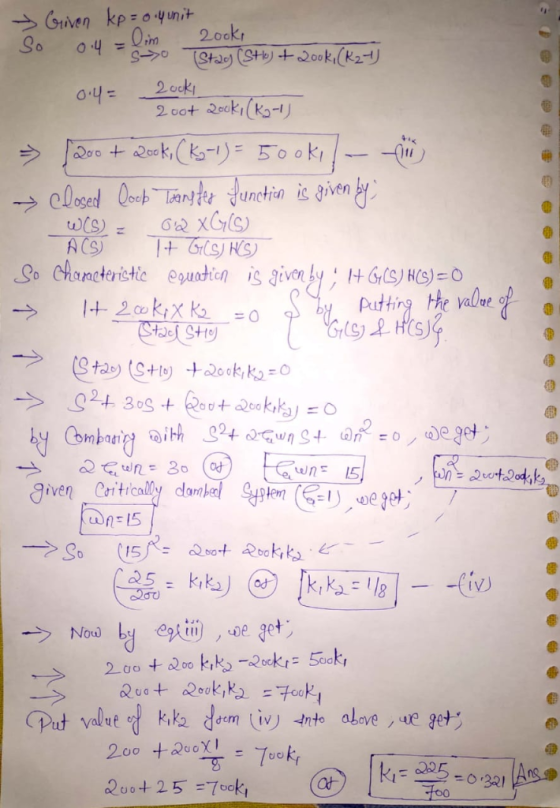
7 Not all second-order systems are designed to give a standard 2nd order response. Consider the power steering for an automobile. The feedback system can be modeled as the block diagram shown in the figure below. For a unit step input A(s), find values of K1 and K2 for which the response w() is critically damped and has a steady-state gain of 0.4 unit. Repeat for a damping ratio of 0.7 and a steady-state...
please solve this with detailed description
7 Not all second-order systems are designed to give a standard 2nd order response. Consider the power steering for an automobile. The feedback system can be modeled as the block diagram shown in the figure below. For a unit step input A(s), find values of K1 and K2 for which the response w() is critically damped and has a steady-state gain of 0.4 unit. Repeat for a damping ratio of 0.7 and a steady-state...
Question three The figure below shows a unit step response of a second order system. From...
 Question three The figure below shows a unit step response of a second order system. From the graph of response find: 1- The rise timet, 2- The peak timet, 3- The maximum overshoot Mp 4- The damped natural frequency w 5. The transfer function. Hence find the damping ratio ζ and the natural frequency ah-Find also the transfer function of the system. r 4 02 15 25 35 45 Question Four For the control system shown in the figure below,...
Question three The figure below shows a unit step response of a second order system. From the graph of response find: 1- The rise timet, 2- The peak timet, 3- The maximum overshoot Mp 4- The damped natural frequency w 5. The transfer function. Hence find the damping ratio ζ and the natural frequency ah-Find also the transfer function of the system. r 4 02 15 25 35 45 Question Four For the control system shown in the figure below,...
A unity feedback system with the forward transfer function G(s)=K/(s+1)(s+3)(s+6) is operating wi...
 A unity feedback system with the forward transfer function
G(s)=K/(s+1)(s+3)(s+6) is operating with a closed-loop step
response that has 15% overshoot. Do the following:
a) Evaluate the steady-state error for a unit step input
b) Design a PI control to reduce the steady-state error to zero
without affecting its transient response
c) Evaluate the steady-state error and overshoot for a unit step
input to your compensated system
A unity feedback system with the forward transfer function G(s) is operating with...
A unity feedback system with the forward transfer function
G(s)=K/(s+1)(s+3)(s+6) is operating with a closed-loop step
response that has 15% overshoot. Do the following:
a) Evaluate the steady-state error for a unit step input
b) Design a PI control to reduce the steady-state error to zero
without affecting its transient response
c) Evaluate the steady-state error and overshoot for a unit step
input to your compensated system
A unity feedback system with the forward transfer function G(s) is operating with...
1. Consider the unity feedback system shown in figure 1 with G(S) -2sti a) Determine the...
 1. Consider the unity feedback system shown in figure 1 with G(S) -2sti a) Determine the closed loop transfer function TF(s) γ(s) R(s) What are the poles and zeros of TF1(s)? [2 marks] b) For TF(s), calculate the DC gain, natural frequency and damping ratio. Classify TF1(s) as underdamped overdamped, critically damped or undamped [3 marks] c) Use the initial value theorem and final value theorem to determine the initial value (Mo) and final value (M) of the [2 marks]...
1. Consider the unity feedback system shown in figure 1 with G(S) -2sti a) Determine the closed loop transfer function TF(s) γ(s) R(s) What are the poles and zeros of TF1(s)? [2 marks] b) For TF(s), calculate the DC gain, natural frequency and damping ratio. Classify TF1(s) as underdamped overdamped, critically damped or undamped [3 marks] c) Use the initial value theorem and final value theorem to determine the initial value (Mo) and final value (M) of the [2 marks]...
Write a MATLAB program that w design a PD compensator assuming second-order approximations as fol...
 Write a MATLAB program that w design a PD compensator assuming second-order approximations as follows. . Allow the user to input the desired percent overshoot, peak time and gain required to meet a steady-state error specification Display the gain-compensated Bode plot . Calculate the required phase margin and bandwidth. . Display the pole, zero, and gain of the PD compensator. Display the compensated Bode plot ·Output the step response of the PD-compensated system to test your second-order approximation. [Implement your...
Write a MATLAB program that w design a PD compensator assuming second-order approximations as follows. . Allow the user to input the desired percent overshoot, peak time and gain required to meet a steady-state error specification Display the gain-compensated Bode plot . Calculate the required phase margin and bandwidth. . Display the pole, zero, and gain of the PD compensator. Display the compensated Bode plot ·Output the step response of the PD-compensated system to test your second-order approximation. [Implement your...
I have no more posting for this month, please solve these for me thanks 1. Given...
 I have no more posting for this month, please solve these for me
thanks
1. Given the following unity feedback system where s+z s2 (s + 10) and the controller is a proportional controller Ge = K, do the following: a. If z = 2, find K so that the damped frequency of the oscillation of the transient response is 5 rad/s. b. The system is to be redesigned by changing the values of z and K. If the new...
I have no more posting for this month, please solve these for me
thanks
1. Given the following unity feedback system where s+z s2 (s + 10) and the controller is a proportional controller Ge = K, do the following: a. If z = 2, find K so that the damped frequency of the oscillation of the transient response is 5 rad/s. b. The system is to be redesigned by changing the values of z and K. If the new...
Explain the effect of an increasing damping ratio to the dynamic response of a second a)...
 Explain the effect of an increasing damping ratio to the dynamic response of a second a) order control system. [CO1/PO2/C2] (5 marks) b) Figure Q2(b) show a block diagram of second order unity feedback control system with Proportional-Derivative control action. The system's damping ratio E of 0.5 is required and the steady state error to a unit step input must not exceed 5% C(s) 1 1 R(s) Kp+Kas (s+1) (s+5) Figure Q2(b) Analyze the performance of Proportional control action alone....
Explain the effect of an increasing damping ratio to the dynamic response of a second a) order control system. [CO1/PO2/C2] (5 marks) b) Figure Q2(b) show a block diagram of second order unity feedback control system with Proportional-Derivative control action. The system's damping ratio E of 0.5 is required and the steady state error to a unit step input must not exceed 5% C(s) 1 1 R(s) Kp+Kas (s+1) (s+5) Figure Q2(b) Analyze the performance of Proportional control action alone....
6. A second order differential equation d?x/dt+ 5 dx/dt+7x = 7y. State the undamped natural frequ...
 6. A second order differential equation d?x/dt+ 5 dx/dt+7x = 7y. State the undamped natural frequ damping ratio. 7. State the damped natural frequency, damping coefficient and time constant for question 6. 8. Given that the transfer function G is K/s(s+sT). State the type and order of the system 9. It is given that G(s) = K/s (1+sT). This system is operated in a closed-loop with unity feedback. W order and the type of closed-loop system? 10. Given the transfer...
6. A second order differential equation d?x/dt+ 5 dx/dt+7x = 7y. State the undamped natural frequ damping ratio. 7. State the damped natural frequency, damping coefficient and time constant for question 6. 8. Given that the transfer function G is K/s(s+sT). State the type and order of the system 9. It is given that G(s) = K/s (1+sT). This system is operated in a closed-loop with unity feedback. W order and the type of closed-loop system? 10. Given the transfer...
Do only parts C and D 1. A second-order system has the following transfer function that...
 Do only parts C and D
1. A second-order system has the following transfer function that describes its response: F(s)- s2 +as + 9 A. For a -3, calculate the following performance specifications of the system: Natural frequency (on) Damping ratio( Estimated rise time and settling time with ±5% change (tr, ts) Estimated overshoot (MP) . B. Label (a) ±5% range of steady state, (b) tr, (c) ts, and (d) MP on the step response curve below (You may also...
Do only parts C and D
1. A second-order system has the following transfer function that describes its response: F(s)- s2 +as + 9 A. For a -3, calculate the following performance specifications of the system: Natural frequency (on) Damping ratio( Estimated rise time and settling time with ±5% change (tr, ts) Estimated overshoot (MP) . B. Label (a) ±5% range of steady state, (b) tr, (c) ts, and (d) MP on the step response curve below (You may also...
Unit Step Response .A plant has the response, c(), to a unit step, as shown. 3.5 a. From the grap...
 Unit Step Response .A plant has the response, c(), to a unit step, as shown. 3.5 a. From the graph, estimate 3 3 the system's time constant, 5 % overshoot and DC gain. 2 1.5 c. Using the information, find o.5 b. What is the system's damped natural frequency and damping ratio? the second order transfer function C(s)/R(s). 0.2 0.4 0.6 0.8 1.2 Time (sec)
Unit Step Response .A plant has the response, c(), to a unit step, as shown....
Unit Step Response .A plant has the response, c(), to a unit step, as shown. 3.5 a. From the graph, estimate 3 3 the system's time constant, 5 % overshoot and DC gain. 2 1.5 c. Using the information, find o.5 b. What is the system's damped natural frequency and damping ratio? the second order transfer function C(s)/R(s). 0.2 0.4 0.6 0.8 1.2 Time (sec)
Unit Step Response .A plant has the response, c(), to a unit step, as shown....
 please solve this with detailed description
7 Not all second-order systems are designed to give a standard 2nd order response. Consider the power steering for an automobile. The feedback system can be modeled as the block diagram shown in the figure below. For a unit step input A(s), find values of K1 and K2 for which the response w() is critically damped and has a steady-state gain of 0.4 unit. Repeat for a damping ratio of 0.7 and a steady-state...
please solve this with detailed description
7 Not all second-order systems are designed to give a standard 2nd order response. Consider the power steering for an automobile. The feedback system can be modeled as the block diagram shown in the figure below. For a unit step input A(s), find values of K1 and K2 for which the response w() is critically damped and has a steady-state gain of 0.4 unit. Repeat for a damping ratio of 0.7 and a steady-state...
 Question three The figure below shows a unit step response of a second order system. From the graph of response find: 1- The rise timet, 2- The peak timet, 3- The maximum overshoot Mp 4- The damped natural frequency w 5. The transfer function. Hence find the damping ratio ζ and the natural frequency ah-Find also the transfer function of the system. r 4 02 15 25 35 45 Question Four For the control system shown in the figure below,...
Question three The figure below shows a unit step response of a second order system. From the graph of response find: 1- The rise timet, 2- The peak timet, 3- The maximum overshoot Mp 4- The damped natural frequency w 5. The transfer function. Hence find the damping ratio ζ and the natural frequency ah-Find also the transfer function of the system. r 4 02 15 25 35 45 Question Four For the control system shown in the figure below,...
 A unity feedback system with the forward transfer function
G(s)=K/(s+1)(s+3)(s+6) is operating with a closed-loop step
response that has 15% overshoot. Do the following:
a) Evaluate the steady-state error for a unit step input
b) Design a PI control to reduce the steady-state error to zero
without affecting its transient response
c) Evaluate the steady-state error and overshoot for a unit step
input to your compensated system
A unity feedback system with the forward transfer function G(s) is operating with...
A unity feedback system with the forward transfer function
G(s)=K/(s+1)(s+3)(s+6) is operating with a closed-loop step
response that has 15% overshoot. Do the following:
a) Evaluate the steady-state error for a unit step input
b) Design a PI control to reduce the steady-state error to zero
without affecting its transient response
c) Evaluate the steady-state error and overshoot for a unit step
input to your compensated system
A unity feedback system with the forward transfer function G(s) is operating with...
 1. Consider the unity feedback system shown in figure 1 with G(S) -2sti a) Determine the closed loop transfer function TF(s) γ(s) R(s) What are the poles and zeros of TF1(s)? [2 marks] b) For TF(s), calculate the DC gain, natural frequency and damping ratio. Classify TF1(s) as underdamped overdamped, critically damped or undamped [3 marks] c) Use the initial value theorem and final value theorem to determine the initial value (Mo) and final value (M) of the [2 marks]...
1. Consider the unity feedback system shown in figure 1 with G(S) -2sti a) Determine the closed loop transfer function TF(s) γ(s) R(s) What are the poles and zeros of TF1(s)? [2 marks] b) For TF(s), calculate the DC gain, natural frequency and damping ratio. Classify TF1(s) as underdamped overdamped, critically damped or undamped [3 marks] c) Use the initial value theorem and final value theorem to determine the initial value (Mo) and final value (M) of the [2 marks]...
 Write a MATLAB program that w design a PD compensator assuming second-order approximations as follows. . Allow the user to input the desired percent overshoot, peak time and gain required to meet a steady-state error specification Display the gain-compensated Bode plot . Calculate the required phase margin and bandwidth. . Display the pole, zero, and gain of the PD compensator. Display the compensated Bode plot ·Output the step response of the PD-compensated system to test your second-order approximation. [Implement your...
Write a MATLAB program that w design a PD compensator assuming second-order approximations as follows. . Allow the user to input the desired percent overshoot, peak time and gain required to meet a steady-state error specification Display the gain-compensated Bode plot . Calculate the required phase margin and bandwidth. . Display the pole, zero, and gain of the PD compensator. Display the compensated Bode plot ·Output the step response of the PD-compensated system to test your second-order approximation. [Implement your...
 I have no more posting for this month, please solve these for me
thanks
1. Given the following unity feedback system where s+z s2 (s + 10) and the controller is a proportional controller Ge = K, do the following: a. If z = 2, find K so that the damped frequency of the oscillation of the transient response is 5 rad/s. b. The system is to be redesigned by changing the values of z and K. If the new...
I have no more posting for this month, please solve these for me
thanks
1. Given the following unity feedback system where s+z s2 (s + 10) and the controller is a proportional controller Ge = K, do the following: a. If z = 2, find K so that the damped frequency of the oscillation of the transient response is 5 rad/s. b. The system is to be redesigned by changing the values of z and K. If the new...
 Explain the effect of an increasing damping ratio to the dynamic response of a second a) order control system. [CO1/PO2/C2] (5 marks) b) Figure Q2(b) show a block diagram of second order unity feedback control system with Proportional-Derivative control action. The system's damping ratio E of 0.5 is required and the steady state error to a unit step input must not exceed 5% C(s) 1 1 R(s) Kp+Kas (s+1) (s+5) Figure Q2(b) Analyze the performance of Proportional control action alone....
Explain the effect of an increasing damping ratio to the dynamic response of a second a) order control system. [CO1/PO2/C2] (5 marks) b) Figure Q2(b) show a block diagram of second order unity feedback control system with Proportional-Derivative control action. The system's damping ratio E of 0.5 is required and the steady state error to a unit step input must not exceed 5% C(s) 1 1 R(s) Kp+Kas (s+1) (s+5) Figure Q2(b) Analyze the performance of Proportional control action alone....
 6. A second order differential equation d?x/dt+ 5 dx/dt+7x = 7y. State the undamped natural frequ damping ratio. 7. State the damped natural frequency, damping coefficient and time constant for question 6. 8. Given that the transfer function G is K/s(s+sT). State the type and order of the system 9. It is given that G(s) = K/s (1+sT). This system is operated in a closed-loop with unity feedback. W order and the type of closed-loop system? 10. Given the transfer...
6. A second order differential equation d?x/dt+ 5 dx/dt+7x = 7y. State the undamped natural frequ damping ratio. 7. State the damped natural frequency, damping coefficient and time constant for question 6. 8. Given that the transfer function G is K/s(s+sT). State the type and order of the system 9. It is given that G(s) = K/s (1+sT). This system is operated in a closed-loop with unity feedback. W order and the type of closed-loop system? 10. Given the transfer...
 Do only parts C and D
1. A second-order system has the following transfer function that describes its response: F(s)- s2 +as + 9 A. For a -3, calculate the following performance specifications of the system: Natural frequency (on) Damping ratio( Estimated rise time and settling time with ±5% change (tr, ts) Estimated overshoot (MP) . B. Label (a) ±5% range of steady state, (b) tr, (c) ts, and (d) MP on the step response curve below (You may also...
Do only parts C and D
1. A second-order system has the following transfer function that describes its response: F(s)- s2 +as + 9 A. For a -3, calculate the following performance specifications of the system: Natural frequency (on) Damping ratio( Estimated rise time and settling time with ±5% change (tr, ts) Estimated overshoot (MP) . B. Label (a) ±5% range of steady state, (b) tr, (c) ts, and (d) MP on the step response curve below (You may also...
 Unit Step Response .A plant has the response, c(), to a unit step, as shown. 3.5 a. From the graph, estimate 3 3 the system's time constant, 5 % overshoot and DC gain. 2 1.5 c. Using the information, find o.5 b. What is the system's damped natural frequency and damping ratio? the second order transfer function C(s)/R(s). 0.2 0.4 0.6 0.8 1.2 Time (sec)
Unit Step Response .A plant has the response, c(), to a unit step, as shown....
Unit Step Response .A plant has the response, c(), to a unit step, as shown. 3.5 a. From the graph, estimate 3 3 the system's time constant, 5 % overshoot and DC gain. 2 1.5 c. Using the information, find o.5 b. What is the system's damped natural frequency and damping ratio? the second order transfer function C(s)/R(s). 0.2 0.4 0.6 0.8 1.2 Time (sec)
Unit Step Response .A plant has the response, c(), to a unit step, as shown....
Most questions answered within 3 hours.
-
For this problem, carry at least four digits after the decimal
in your calculations. Answers may...
asked 2 hours ago -
Ask a user for three positive integer numbers. Use an input
validation loop to make sure...
asked 2 hours ago -
The most primitive form of data from data analysis perspective
is a. nominal scale b. ordinal...
asked 2 hours ago -
The number of vacancies in some hypothetical metal increases by
a factor of 5 when the...
asked 2 hours ago -
The fiduciary duty that is predicated on the concept that a
board of directors and officers...
asked 2 hours ago -
Sustainable Growth Rate Last year Umbrellas Unlimited
Corporation had an ROE of 17.3% and a dividend...
asked 2 hours ago -
Write a MATLAB program to do the following:
Receive 5 input values and store them into...
asked 2 hours ago -
Which one of the following aqueous solutions would you expect to
have the largest conductance: (a)...
asked 2 hours ago -
(Intermediate Macroeconomics)
2.The aggregate supply function be ys=2000+P, and the aggregate
demand function be yD=2400-P。Find the...
asked 3 hours ago -
I am having a really difficult time developing a strong thesis
for this question....... To what...
asked 3 hours ago -
There are n street lights in a line. In order to conserve
energy, the city decides...
asked 3 hours ago -
Cellular growth and repair require a cell to go through the cell
cycle. Like all biological...
asked 3 hours ago