

(b) We proved in class, using the Bendixson-Dulac theorem, that this system has no periodic solution with trajectory in the first quadrant of the plane. Assuming this, use the Poincare-Bendixson theorem to prove that all trajectories (z(t),y(t)) of the system (2) with initial point ((0),0)) in the first quadrant of the plane tend to the point (4/3,4/3). (e) Discuss the long-term implications of your conclusion in (b) for the predator-prey system (2)
Homework Answers






Add Answer to:
5. Consider the nonlinear two dimensional Lotka-Volterra (predator-prey) system z'(t) = z(t)[2-2(...
5. Consider the nonlinear two dimensional Lotka-Volterra (predator-prey) system z'(t) = z(t)[2-2(t)-2y(t)l, y'(t) = y(t)12-y(t)--2(t)] (a)...
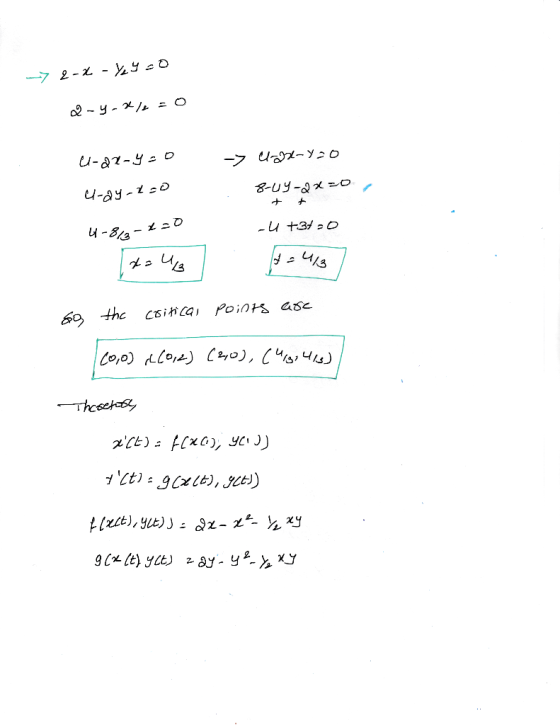
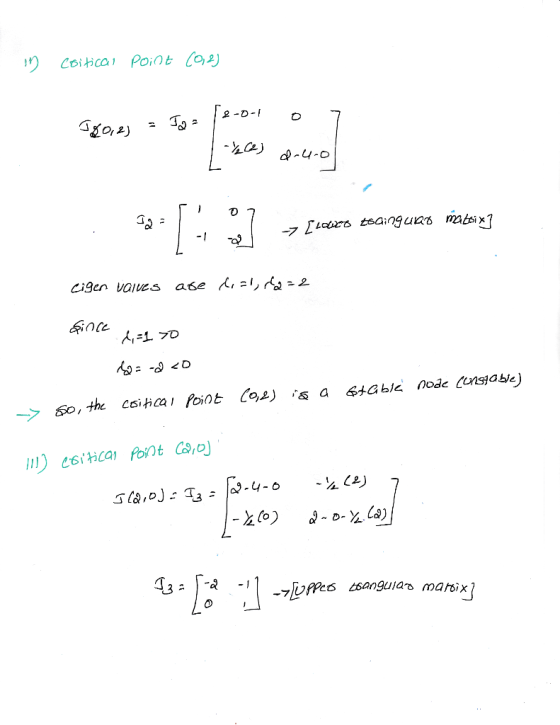
 5. Consider the nonlinear two dimensional Lotka-Volterra (predator-prey) system z'(t) = z(t)[2-2(t)-2y(t)l, y'(t) = y(t)12-y(t)--2(t)] (a) Find all critical points of this system, and at each determine whether or not the system is locally stable or unstable. (b) We proved in class, using the Bendixson-Dulac theorem, that this system has no periodic solution with trajectory in the first quadrant of the plane. Assuming this, use the Poincare-Bendixson theorem to prove that all trajectories (z(t),y(t)) of the system (2) with initial...
5. Consider the nonlinear two dimensional Lotka-Volterra (predator-prey) system z'(t) = z(t)[2-2(t)-2y(t)l, y'(t) = y(t)12-y(t)--2(t)] (a) Find all critical points of this system, and at each determine whether or not the system is locally stable or unstable. (b) We proved in class, using the Bendixson-Dulac theorem, that this system has no periodic solution with trajectory in the first quadrant of the plane. Assuming this, use the Poincare-Bendixson theorem to prove that all trajectories (z(t),y(t)) of the system (2) with initial...
1. Consider the Lotka-Volterra model for the interaction between a predator population (wolves W(t)) and a...
 1. Consider the Lotka-Volterra model for the interaction between a predator population (wolves W(t)) and a prey population (moose M(t)), À = aM - bmw W = -cW+dMW with the four constants all positive. (a) Explain the meaning of the terms. (b) Non-dimensionalize the equations in the form dx/dt = *(1 - y) and dy/dt = xy(x - 1). (c) Find the fixed points, linearize, classify their stability and draw a phase diagram for various initial conditions (again, using a...
1. Consider the Lotka-Volterra model for the interaction between a predator population (wolves W(t)) and a prey population (moose M(t)), À = aM - bmw W = -cW+dMW with the four constants all positive. (a) Explain the meaning of the terms. (b) Non-dimensionalize the equations in the form dx/dt = *(1 - y) and dy/dt = xy(x - 1). (c) Find the fixed points, linearize, classify their stability and draw a phase diagram for various initial conditions (again, using a...
Exercise 3, Section 9.5. Modified Lotka- Volterra Predator-Prey model Consider two species (rabbits and foxes) such that the population R (rabbits) and F (foxrs) obey the system of equations dR d...
 Exercise 3, Section 9.5. Modified Lotka- Volterra Predator-Prey model Consider two species (rabbits and foxes) such that the population R (rabbits) and F (foxrs) obey the system of equations dR dt dF dt R2-R)-12RF . What happens to the population of rabbits if the number of foxes is arro? (Use the phase line analysis from Chapter 2) What happens to the population of foxes if the number of rabbits is zero? 3. Using the method of nullclines, draw an approximate...
Exercise 3, Section 9.5. Modified Lotka- Volterra Predator-Prey model Consider two species (rabbits and foxes) such that the population R (rabbits) and F (foxrs) obey the system of equations dR dt dF dt R2-R)-12RF . What happens to the population of rabbits if the number of foxes is arro? (Use the phase line analysis from Chapter 2) What happens to the population of foxes if the number of rabbits is zero? 3. Using the method of nullclines, draw an approximate...
5. Consider the system: dz 4y 1 dy (a) Are these species predator-prey or competing? b) What type of growth does species z exhibit in absence of species y? What type of growth does species y exhibit...
 5. Consider the system: dz 4y 1 dy (a) Are these species predator-prey or competing? b) What type of growth does species z exhibit in absence of species y? What type of growth does species y exhibit in absence of species r? (c) Find all critical (equilibrium) points d) Using the Jacobian matrix, classify (if possible) each critical (equilibrium) point as a stable node, a stable spiral point, an unstable node, an unstable spiral point, or a saddle point. (e)...
5. Consider the system: dz 4y 1 dy (a) Are these species predator-prey or competing? b) What type of growth does species z exhibit in absence of species y? What type of growth does species y exhibit in absence of species r? (c) Find all critical (equilibrium) points d) Using the Jacobian matrix, classify (if possible) each critical (equilibrium) point as a stable node, a stable spiral point, an unstable node, an unstable spiral point, or a saddle point. (e)...
Problem 3. Linearization of a nonlinear system at a non-hyperbolic fixed point] Consider the nonlinear system...
 Problem 3. Linearization of a nonlinear system at a non-hyperbolic fixed point] Consider the nonlinear system t' =-y+px(x² + y) (4) y = 1+ y(x² + y2), where is a parameter. Obviously, the origin x* = (0,0) is a fixed point of (4). (e) The solution of the ODE for o(t) is obvious - the angle o increases at a constant rate. Without solving the ODE for r(t), explain how r(t) behaves when t o in the cases H<0,1 =...
Problem 3. Linearization of a nonlinear system at a non-hyperbolic fixed point] Consider the nonlinear system t' =-y+px(x² + y) (4) y = 1+ y(x² + y2), where is a parameter. Obviously, the origin x* = (0,0) is a fixed point of (4). (e) The solution of the ODE for o(t) is obvious - the angle o increases at a constant rate. Without solving the ODE for r(t), explain how r(t) behaves when t o in the cases H<0,1 =...
2. Consider the systems: dz =2x(1-5)-yr dt dy dt a) Which system corresponds to a predator-prey o...
 2. Consider the systems: dz =2x(1-5)-yr dt dy dt a) Which system corresponds to a predator-prey one? Which is the predator and which the prey? Briefly justify your answer. b) Find the equilibrium solutions only for the predator-prey one. c) Sketch its phase plane showing the equilibrium solutions and the behavior on the r- and y-axis (only for the predator-prey one) d) Describe briefly what kind of situation could the other system represent.
2. Consider the systems: dz =2x(1-5)-yr dt...
2. Consider the systems: dz =2x(1-5)-yr dt dy dt a) Which system corresponds to a predator-prey one? Which is the predator and which the prey? Briefly justify your answer. b) Find the equilibrium solutions only for the predator-prey one. c) Sketch its phase plane showing the equilibrium solutions and the behavior on the r- and y-axis (only for the predator-prey one) d) Describe briefly what kind of situation could the other system represent.
2. Consider the systems: dz =2x(1-5)-yr dt...
Requesting the solution to the problem below from Ordinary Differential Equations and Dynamical Systems, Gerald Teschl....
 Requesting the solution to the problem below from Ordinary
Differential Equations and Dynamical Systems, Gerald Teschl.
Thanks.
Additional materials:
Problem 7.2 (Volterra principle). Show that for any orbit of the Volterra- Lotka system (7.3), the time average over one period 1 1 T | (0)2 = 1, T | g(t)dt =1 is independent of the orbit. (Hint: Integrate log(r(t)) over one period.) 7.1. Examples from ecology In this section we want to consider a model from ecology. It describes two...
Requesting the solution to the problem below from Ordinary
Differential Equations and Dynamical Systems, Gerald Teschl.
Thanks.
Additional materials:
Problem 7.2 (Volterra principle). Show that for any orbit of the Volterra- Lotka system (7.3), the time average over one period 1 1 T | (0)2 = 1, T | g(t)dt =1 is independent of the orbit. (Hint: Integrate log(r(t)) over one period.) 7.1. Examples from ecology In this section we want to consider a model from ecology. It describes two...
2. Consider the nonlinear plane autonomous system 3 2 satisfying the initial condition (r(0), y(0)) = (4,0). (a) Change...
 2. Consider the nonlinear plane autonomous system 3 2 satisfying the initial condition (r(0), y(0)) = (4,0). (a) Change to polar coordinates and find the solution r(t) and (t) of the system (b) As t goes to infinity, (x(t). y(t)) will follow the circle trajectory. Find the radius and period of the circle trajectory. (limit behavior of the solution (a))
2. Consider the nonlinear plane autonomous system 3 2 satisfying the initial condition (r(0), y(0)) = (4,0). (a) Change to...
2. Consider the nonlinear plane autonomous system 3 2 satisfying the initial condition (r(0), y(0)) = (4,0). (a) Change to polar coordinates and find the solution r(t) and (t) of the system (b) As t goes to infinity, (x(t). y(t)) will follow the circle trajectory. Find the radius and period of the circle trajectory. (limit behavior of the solution (a))
2. Consider the nonlinear plane autonomous system 3 2 satisfying the initial condition (r(0), y(0)) = (4,0). (a) Change to...
Problem 2 Consider the system of equations 2 1. Show that the z and t are determined as a functio...
 Problem 2 Consider the system of equations 2 1. Show that the z and t are determined as a function of x and y near the point (0, 1,-1). Can we apply the Implicit Function theorem? 2. Compute the partial derivatives of z and t with respect to z, y at (0,1) 3. Without solving the system, what is approximate value of 2(0.001,1.002) (Hint: Use the first order Taylor approximation about the point (1,0) to find the approximation) 4. Compute...
Problem 2 Consider the system of equations 2 1. Show that the z and t are determined as a function of x and y near the point (0, 1,-1). Can we apply the Implicit Function theorem? 2. Compute the partial derivatives of z and t with respect to z, y at (0,1) 3. Without solving the system, what is approximate value of 2(0.001,1.002) (Hint: Use the first order Taylor approximation about the point (1,0) to find the approximation) 4. Compute...
Consider the nonlinear second-order differential equation 4x"+4x'+2(k^2)(x^2)− 1/2 =0, where k > 0 is a const...
Consider the nonlinear second-order differential equation 4x"+4x'+2(k^2)(x^2)− 1/2 =0, where k > 0 is a constant. Answer to the following questions. (a) Show that there is no periodic solution in a simply connected region R={(x,y) ∈ R2 | x <0}. (Hint: Use the corollary to Theorem 11.5.1>> If symply connected region R either contains no critical points of plane autonomous system or contains a single saddle point, then there are no periodic solutions. ) (b) Derive a plane autonomous system...
 5. Consider the nonlinear two dimensional Lotka-Volterra (predator-prey) system z'(t) = z(t)[2-2(t)-2y(t)l, y'(t) = y(t)12-y(t)--2(t)] (a) Find all critical points of this system, and at each determine whether or not the system is locally stable or unstable. (b) We proved in class, using the Bendixson-Dulac theorem, that this system has no periodic solution with trajectory in the first quadrant of the plane. Assuming this, use the Poincare-Bendixson theorem to prove that all trajectories (z(t),y(t)) of the system (2) with initial...
5. Consider the nonlinear two dimensional Lotka-Volterra (predator-prey) system z'(t) = z(t)[2-2(t)-2y(t)l, y'(t) = y(t)12-y(t)--2(t)] (a) Find all critical points of this system, and at each determine whether or not the system is locally stable or unstable. (b) We proved in class, using the Bendixson-Dulac theorem, that this system has no periodic solution with trajectory in the first quadrant of the plane. Assuming this, use the Poincare-Bendixson theorem to prove that all trajectories (z(t),y(t)) of the system (2) with initial...
 1. Consider the Lotka-Volterra model for the interaction between a predator population (wolves W(t)) and a prey population (moose M(t)), À = aM - bmw W = -cW+dMW with the four constants all positive. (a) Explain the meaning of the terms. (b) Non-dimensionalize the equations in the form dx/dt = *(1 - y) and dy/dt = xy(x - 1). (c) Find the fixed points, linearize, classify their stability and draw a phase diagram for various initial conditions (again, using a...
1. Consider the Lotka-Volterra model for the interaction between a predator population (wolves W(t)) and a prey population (moose M(t)), À = aM - bmw W = -cW+dMW with the four constants all positive. (a) Explain the meaning of the terms. (b) Non-dimensionalize the equations in the form dx/dt = *(1 - y) and dy/dt = xy(x - 1). (c) Find the fixed points, linearize, classify their stability and draw a phase diagram for various initial conditions (again, using a...
 Exercise 3, Section 9.5. Modified Lotka- Volterra Predator-Prey model Consider two species (rabbits and foxes) such that the population R (rabbits) and F (foxrs) obey the system of equations dR dt dF dt R2-R)-12RF . What happens to the population of rabbits if the number of foxes is arro? (Use the phase line analysis from Chapter 2) What happens to the population of foxes if the number of rabbits is zero? 3. Using the method of nullclines, draw an approximate...
Exercise 3, Section 9.5. Modified Lotka- Volterra Predator-Prey model Consider two species (rabbits and foxes) such that the population R (rabbits) and F (foxrs) obey the system of equations dR dt dF dt R2-R)-12RF . What happens to the population of rabbits if the number of foxes is arro? (Use the phase line analysis from Chapter 2) What happens to the population of foxes if the number of rabbits is zero? 3. Using the method of nullclines, draw an approximate...
 5. Consider the system: dz 4y 1 dy (a) Are these species predator-prey or competing? b) What type of growth does species z exhibit in absence of species y? What type of growth does species y exhibit in absence of species r? (c) Find all critical (equilibrium) points d) Using the Jacobian matrix, classify (if possible) each critical (equilibrium) point as a stable node, a stable spiral point, an unstable node, an unstable spiral point, or a saddle point. (e)...
5. Consider the system: dz 4y 1 dy (a) Are these species predator-prey or competing? b) What type of growth does species z exhibit in absence of species y? What type of growth does species y exhibit in absence of species r? (c) Find all critical (equilibrium) points d) Using the Jacobian matrix, classify (if possible) each critical (equilibrium) point as a stable node, a stable spiral point, an unstable node, an unstable spiral point, or a saddle point. (e)...
 Problem 3. Linearization of a nonlinear system at a non-hyperbolic fixed point] Consider the nonlinear system t' =-y+px(x² + y) (4) y = 1+ y(x² + y2), where is a parameter. Obviously, the origin x* = (0,0) is a fixed point of (4). (e) The solution of the ODE for o(t) is obvious - the angle o increases at a constant rate. Without solving the ODE for r(t), explain how r(t) behaves when t o in the cases H<0,1 =...
Problem 3. Linearization of a nonlinear system at a non-hyperbolic fixed point] Consider the nonlinear system t' =-y+px(x² + y) (4) y = 1+ y(x² + y2), where is a parameter. Obviously, the origin x* = (0,0) is a fixed point of (4). (e) The solution of the ODE for o(t) is obvious - the angle o increases at a constant rate. Without solving the ODE for r(t), explain how r(t) behaves when t o in the cases H<0,1 =...
 2. Consider the systems: dz =2x(1-5)-yr dt dy dt a) Which system corresponds to a predator-prey one? Which is the predator and which the prey? Briefly justify your answer. b) Find the equilibrium solutions only for the predator-prey one. c) Sketch its phase plane showing the equilibrium solutions and the behavior on the r- and y-axis (only for the predator-prey one) d) Describe briefly what kind of situation could the other system represent.
2. Consider the systems: dz =2x(1-5)-yr dt...
2. Consider the systems: dz =2x(1-5)-yr dt dy dt a) Which system corresponds to a predator-prey one? Which is the predator and which the prey? Briefly justify your answer. b) Find the equilibrium solutions only for the predator-prey one. c) Sketch its phase plane showing the equilibrium solutions and the behavior on the r- and y-axis (only for the predator-prey one) d) Describe briefly what kind of situation could the other system represent.
2. Consider the systems: dz =2x(1-5)-yr dt...
 Requesting the solution to the problem below from Ordinary
Differential Equations and Dynamical Systems, Gerald Teschl.
Thanks.
Additional materials:
Problem 7.2 (Volterra principle). Show that for any orbit of the Volterra- Lotka system (7.3), the time average over one period 1 1 T | (0)2 = 1, T | g(t)dt =1 is independent of the orbit. (Hint: Integrate log(r(t)) over one period.) 7.1. Examples from ecology In this section we want to consider a model from ecology. It describes two...
Requesting the solution to the problem below from Ordinary
Differential Equations and Dynamical Systems, Gerald Teschl.
Thanks.
Additional materials:
Problem 7.2 (Volterra principle). Show that for any orbit of the Volterra- Lotka system (7.3), the time average over one period 1 1 T | (0)2 = 1, T | g(t)dt =1 is independent of the orbit. (Hint: Integrate log(r(t)) over one period.) 7.1. Examples from ecology In this section we want to consider a model from ecology. It describes two...
 2. Consider the nonlinear plane autonomous system 3 2 satisfying the initial condition (r(0), y(0)) = (4,0). (a) Change to polar coordinates and find the solution r(t) and (t) of the system (b) As t goes to infinity, (x(t). y(t)) will follow the circle trajectory. Find the radius and period of the circle trajectory. (limit behavior of the solution (a))
2. Consider the nonlinear plane autonomous system 3 2 satisfying the initial condition (r(0), y(0)) = (4,0). (a) Change to...
2. Consider the nonlinear plane autonomous system 3 2 satisfying the initial condition (r(0), y(0)) = (4,0). (a) Change to polar coordinates and find the solution r(t) and (t) of the system (b) As t goes to infinity, (x(t). y(t)) will follow the circle trajectory. Find the radius and period of the circle trajectory. (limit behavior of the solution (a))
2. Consider the nonlinear plane autonomous system 3 2 satisfying the initial condition (r(0), y(0)) = (4,0). (a) Change to...
 Problem 2 Consider the system of equations 2 1. Show that the z and t are determined as a function of x and y near the point (0, 1,-1). Can we apply the Implicit Function theorem? 2. Compute the partial derivatives of z and t with respect to z, y at (0,1) 3. Without solving the system, what is approximate value of 2(0.001,1.002) (Hint: Use the first order Taylor approximation about the point (1,0) to find the approximation) 4. Compute...
Problem 2 Consider the system of equations 2 1. Show that the z and t are determined as a function of x and y near the point (0, 1,-1). Can we apply the Implicit Function theorem? 2. Compute the partial derivatives of z and t with respect to z, y at (0,1) 3. Without solving the system, what is approximate value of 2(0.001,1.002) (Hint: Use the first order Taylor approximation about the point (1,0) to find the approximation) 4. Compute...
Most questions answered within 3 hours.
-
The average length of time between arrivals at a turnpike
toll-booth is 26 seconds. What is...
asked 23 minutes ago -
(a) A piston at 6.1 atm contains a gas that occupies a volume of
3.5 L....
asked 1 hour ago -
Please answer true or false. Words
cannot be changed or added in to make it true...
asked 1 hour ago -
An empty test tube weighs 15.923 grams. Then,
MgCl2•6H2O is added into the test tube. After...
asked 1 hour ago -
Assume memory access is 10 units of time and disk access is
10000 units of time....
asked 1 hour ago -
1. Are all good samples random?
2. Magazines often report surveys giving statistics such as “63%...
asked 2 hours ago -
Under all the various types of market structures, firms
must eventually earn some economic profits for...
asked 2 hours ago -
Consider the following fitness regime for a single locus trait
with two co-dominant alleles: w11 =...
asked 2 hours ago -
A large cable company reports the following.
80% of its customers subscribe to its cable TV...
asked 2 hours ago -
Please answer the question in brief.
Discuss the role of ERP in organizations. Are ERP tools...
asked 2 hours ago -
Discuss the pros and cons of collaborative software such
as SameTime. Does it increase productivity? What...
asked 2 hours ago -
Buying your in-laws a gift because it’s expected is
due to the ____________ motive of gift-giving....
asked 2 hours ago