Question


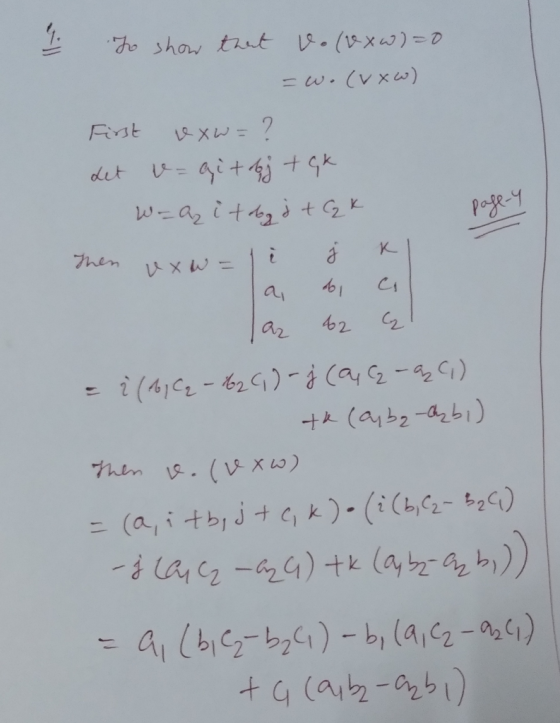
4. The common definition is: x w is the vector in R meeting these conditi ons perp endi cular to v and w, . having length equal to llell . Il 'll . I sin(θ), and det(, w, v xu) >0 The last requirement nails down the direction of u × w along the line perpendicular to the plan e spanned by e and w. It says that v,w, x w form a posivly-oriented ordered basis of R3. This is one obeying the "right-hand rule" if you curl the fingers of your right hand from v to w, the direction your thumb points is the direction of × w. So to prove that our definition agrees with this, you just have to show that u. (v × w) = 0 = w. (v × w) and the orientation condition. Do so.
Homework Answers
Answer #1

2. 2 -1 as mappirs
丁 he
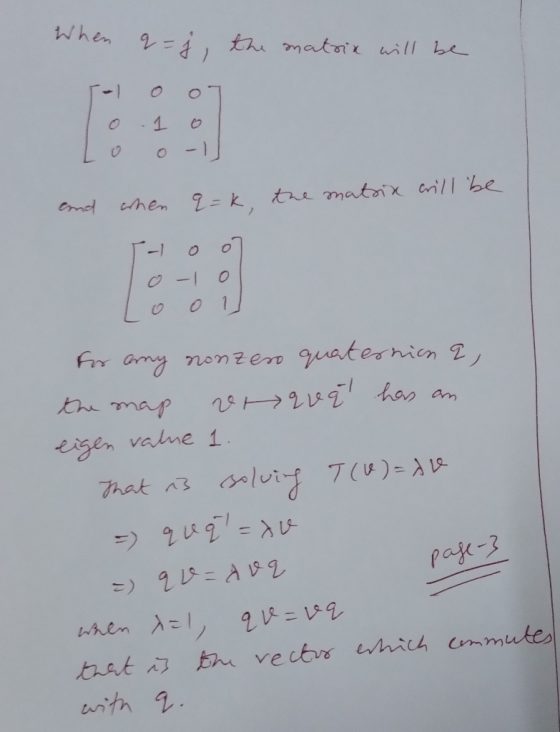
O-1 co non 군 en eigen valne 1
2 (1-021)
We were unable to transcribe this image
Know the answer?
Add Answer to:
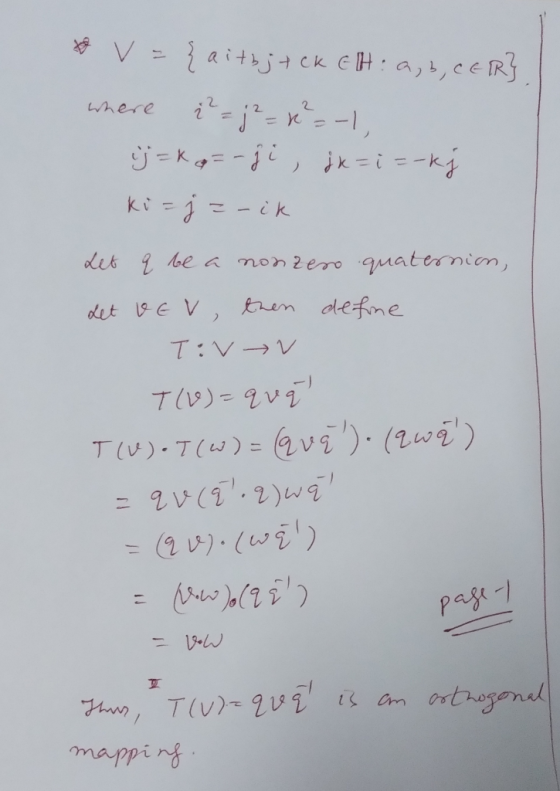
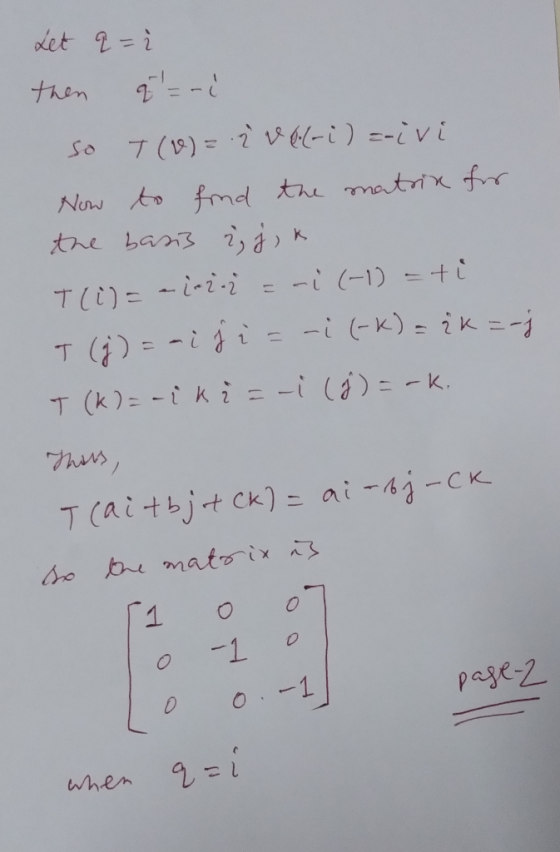
Let V be the subspace of "vectors" in Hamilton's sense, that is, quat ernions with zero real part...
Not the answer you're looking for?
Ask your own homework help question.
Our experts will answer your question WITHIN MINUTES for Free.
Similar Homework Help Questions
Hi, could you post solutions to the following questions. Thanks. 2. (a) Let V be a vector space on R. Give the definition of a subspace W of V 2% (b) For each of the following subsets of IR3 sta...
 Hi,
could you post solutions to the following questions. Thanks.
2. (a) Let V be a vector space on R. Give the definition of a subspace W of V 2% (b) For each of the following subsets of IR3 state whether they are subepaces of R3 or not by clearly explaining your answer. 2% 2% (c) Consider the map F : R2 → R3 defined by for any z = (zi,Z2) E R2. 3% 3% 3% 3% i. Show that...
Hi,
could you post solutions to the following questions. Thanks.
2. (a) Let V be a vector space on R. Give the definition of a subspace W of V 2% (b) For each of the following subsets of IR3 state whether they are subepaces of R3 or not by clearly explaining your answer. 2% 2% (c) Consider the map F : R2 → R3 defined by for any z = (zi,Z2) E R2. 3% 3% 3% 3% i. Show that...
 Hi,
could you post solutions to the following questions. Thanks.
2. (a) Let V be a vector space on R. Give the definition of a subspace W of V 2% (b) For each of the following subsets of IR3 state whether they are subepaces of R3 or not by clearly explaining your answer. 2% 2% (c) Consider the map F : R2 → R3 defined by for any z = (zi,Z2) E R2. 3% 3% 3% 3% i. Show that...
Hi,
could you post solutions to the following questions. Thanks.
2. (a) Let V be a vector space on R. Give the definition of a subspace W of V 2% (b) For each of the following subsets of IR3 state whether they are subepaces of R3 or not by clearly explaining your answer. 2% 2% (c) Consider the map F : R2 → R3 defined by for any z = (zi,Z2) E R2. 3% 3% 3% 3% i. Show that...
ADVERTISEMENT
Need Online Homework Help?
Ask
a QuestionGet Answers For Free
Most questions answered within 3 hours.
Most questions answered within 3 hours.
ADVERTISEMENT
ADVERTISEMENT
Active Questions
-
. Please give the mechanism for this type of problem. Step by
Step
The toxin that...
asked 2 minutes ago -
If you have a 1M stock solution and you want to dilute 1 :10
with water,...
asked 4 minutes ago -
In a load instruction, the effective address is obtained by
A) Retriving the address from a...
asked 4 minutes ago -
Use the following information to answer this question.
Windswept, Inc. 2017 Income Statement ($ in millions)...
asked 5 minutes ago -
A mutual fund salesperson has arranged to call on four people
tomorrow. Based on past experience...
asked 38 minutes ago -
Let the RV Y has the pdf
f ( y ) = 6 y ( 1...
asked 50 minutes ago -
Question 12
Where should a copy of a private key should be placed so it is...
asked 7 minutes ago -
What is the entropy change to the surroundings when 1 mol of ice
melts in someone's...
asked 26 minutes ago -
Pt1
An electrochemical cell is set up at 25°C based on the overall
reaction represented by...
asked 33 minutes ago -
Explain traveling wave theory. Explain how the peaking of the
wave leads to action potentials and...
asked 24 minutes ago -
If you mixed 35.0 mLmL of 0.100 M Tris-HCl with 65.0
mLmL of 0.200 M Tris-base, what would...
asked 20 minutes ago -
Which force do you think wields a stronger influence over our
ethical behavior – our personal...
asked 26 minutes ago
ADVERTISEMENT