Homework Answers
clear
clc
close all
s = tf('s');
%definig each block's TF
G1 = 4*(1+0*s); %approximating 4
G2 = 2/((s+1)*(s+8));
G3 = 1/s;
G4 = 0.2*(1+0*s); %approximating 0.2
%definig inputs and outputs for each block
G1.InputName = 'r'; G1.OutputName = 'eg1';
G2.InputName = 'e'; G2.OutputName = 'ym';
G3.InputName = 'ym';G3.OutputName = 'y';
G4.InputName = 'ym';G4.OutputName = 'eg4';
%summing points
sum1 = sumblk('r','u','y'); % r = u + y
sum2 = sumblk('e','eg1','eg4','+-'); % e = eg1 - eg4
%connecting the blocks to relate input u with output y
closedLoopTF = connect(G1,G2,G4,G3,sum1,sum2,'u','y');
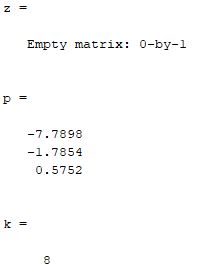
%obtaining zeros z, poles p and gain k
[z,p,k] = zpkdata(closedLoopTF,'v')
COMMENT DOWN FOR ANY QUERY RELATED TO THIS ANSWER,
IF YOU'RE SATISFIED, GIVE A THUMBS UP
~yc~
Add Answer to:
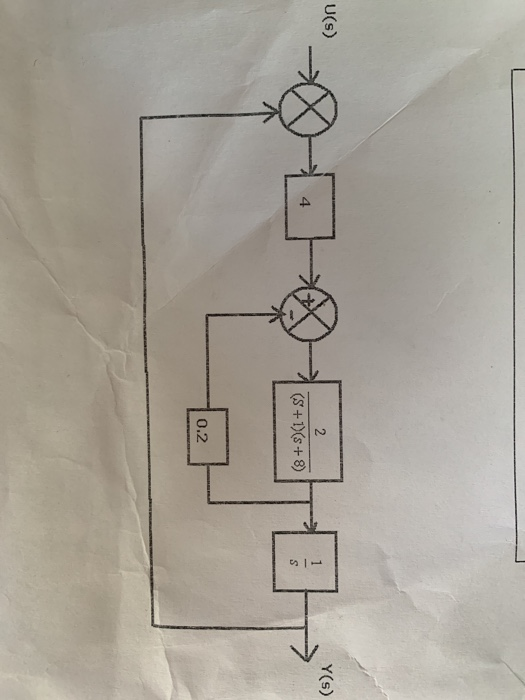
solve it simply by using Matlab first find cloosed loop transfer function second find zeros, poles and gain Y(s) 0 U(s) 2 4 0.2 Y(s) 0 U(s) 2 4 0.2
1) Write a Matlab program for the following block diagram: a) to derive its closed-loop transfer function. b) to find and plot the poles-zeros of closed-loop transfer function. s+2s+3 R(s) → Y(s)...
 1) Write a Matlab program for the following block diagram: a) to derive its closed-loop transfer function. b) to find and plot the poles-zeros of closed-loop transfer function. s+2s+3 R(s) → Y(s) 2s+3 2 +2s +5 15 Automatic Control Systen
1) Write a Matlab program for the following block diagram: a) to derive its closed-loop transfer function. b) to find and plot the poles-zeros of closed-loop transfer function. s+2s+3 R(s) → Y(s) 2s+3 2 +2s +5 15 Automatic Control Systen
1) Write a Matlab program for the following block diagram: a) to derive its closed-loop transfer function. b) to find and plot the poles-zeros of closed-loop transfer function. s+2s+3 R(s) → Y(s) 2s+3 2 +2s +5 15 Automatic Control Systen
1) Write a Matlab program for the following block diagram: a) to derive its closed-loop transfer function. b) to find and plot the poles-zeros of closed-loop transfer function. s+2s+3 R(s) → Y(s) 2s+3 2 +2s +5 15 Automatic Control Systen
For the following systems, find the transfer function using MATLAB. Also, determine the poles and zeros...
 For the following systems, find the transfer function using MATLAB. Also, determine the poles and zeros of each transfer. You should be able to use some combination of the following MATLAB functions: 'ss2tf( )', 'ss( )', 'tf( )', 'pole( )', "zero( )', and 'roots() 100 ).y) = [0_1)|) 2 a. |x2(t)] -10 [x1 (t lx20 21 b. + 01 x1 (t) 0 x2(t) 1 u(t), y(t): ol]x3(t)] [(t)] x2(t) 3(t) [x1 (t)] [o 0 1x2(t) [x3(t)] -4 -2 0 2...
For the following systems, find the transfer function using MATLAB. Also, determine the poles and zeros of each transfer. You should be able to use some combination of the following MATLAB functions: 'ss2tf( )', 'ss( )', 'tf( )', 'pole( )', "zero( )', and 'roots() 100 ).y) = [0_1)|) 2 a. |x2(t)] -10 [x1 (t lx20 21 b. + 01 x1 (t) 0 x2(t) 1 u(t), y(t): ol]x3(t)] [(t)] x2(t) 3(t) [x1 (t)] [o 0 1x2(t) [x3(t)] -4 -2 0 2...
Solve the following using MATLAB: 3. Consider the transfer function: H S ) = 6 2s2...
 Solve the following using MATLAB:
3. Consider the transfer function: H S ) = 6 2s2 + 6s 2s4 + 8 s +3 .4 L + 3 a) Write lines of code to find the zeros and poles of the above transfer function. b) Write lines of code to find a partial fraction expansion of the above transfer function.
Solve the following using MATLAB:
3. Consider the transfer function: H S ) = 6 2s2 + 6s 2s4 + 8 s +3 .4 L + 3 a) Write lines of code to find the zeros and poles of the above transfer function. b) Write lines of code to find a partial fraction expansion of the above transfer function.
a.)Determine the values of the poles and zeros of the closed loop system shown when the controller gain kc = 0. answer should be no zeros poles at s = 2.0 and -0.5 ± j b.) Compare these with the open...
 a.)Determine the values of the
poles and zeros of the closed loop system shown when the controller
gain kc = 0.
answer should be
no zeros
poles at s = 2.0 and -0.5 ± j
b.) Compare these with the open loop poles and zeros.
c.) Now determine the values of the poles and zeros at some very
high gain, say kc = 105 .
Determine the values of the poles and zeros of the closed loop system shown when...
a.)Determine the values of the
poles and zeros of the closed loop system shown when the controller
gain kc = 0.
answer should be
no zeros
poles at s = 2.0 and -0.5 ± j
b.) Compare these with the open loop poles and zeros.
c.) Now determine the values of the poles and zeros at some very
high gain, say kc = 105 .
Determine the values of the poles and zeros of the closed loop system shown when...
Theroot-locus design method (d) Gos)H(s)2) 5.5 Complex poles and zeros. For the systems with an open-loop transfer function given below, sketch the root locus plot. Find the asymptotes and their angle...
 Theroot-locus design method
(d) Gos)H(s)2) 5.5 Complex poles and zeros. For the systems with an open-loop transfer function given below, sketch the root locus plot. Find the asymptotes and their angles. the break-away or break-in points, the angle of arrival or departure for the complex poles and zeros, respectively, and the range of k for closed-loop stability 5 10ん k(s+21
(d) Gos)H(s)2) 5.5 Complex poles and zeros. For the systems with an open-loop transfer function given below, sketch the root...
Theroot-locus design method
(d) Gos)H(s)2) 5.5 Complex poles and zeros. For the systems with an open-loop transfer function given below, sketch the root locus plot. Find the asymptotes and their angles. the break-away or break-in points, the angle of arrival or departure for the complex poles and zeros, respectively, and the range of k for closed-loop stability 5 10ん k(s+21
(d) Gos)H(s)2) 5.5 Complex poles and zeros. For the systems with an open-loop transfer function given below, sketch the root...
alpha = 5.0 beta = 7.1 zeta = 6.9 PROBLEM 1 (20 points). Given the filter with transfer function +28-1+-2 11(2) = 1-(α/10)2-4 (a2/100):-2 Use MATLAB to Find the zeros and poles of H() Plot the pole...
 alpha = 5.0
beta = 7.1
zeta = 6.9
PROBLEM 1 (20 points). Given the filter with transfer function +28-1+-2 11(2) = 1-(α/10)2-4 (a2/100):-2 Use MATLAB to Find the zeros and poles of H() Plot the poles and zeros on the -plane. The pot should include the uit circle. Plot the magnitude response (in dB) Plot the phase response. Deliverables: Your MATLAB code used to solve Problem 1 and all the generated plots.
PROBLEM 1 (20 points). Given the filter...
alpha = 5.0
beta = 7.1
zeta = 6.9
PROBLEM 1 (20 points). Given the filter with transfer function +28-1+-2 11(2) = 1-(α/10)2-4 (a2/100):-2 Use MATLAB to Find the zeros and poles of H() Plot the poles and zeros on the -plane. The pot should include the uit circle. Plot the magnitude response (in dB) Plot the phase response. Deliverables: Your MATLAB code used to solve Problem 1 and all the generated plots.
PROBLEM 1 (20 points). Given the filter...
4. Determine the transfer function, poles and zeros, and stability of the system represented by the...
4. Determine the transfer function, poles and zeros, and stability of the system represented by the following difference equation: y[n] = -1.5y[n-1] + y[n-2] + x[n] Answers:H[z]= 1/(1+(1.5z^-1) - (z^-2)); poles at z = -2, 0, 5; zeros at z=0; unstable
105- Problem #4 - Given the transfer function T(s)- ***(1+%o1+%0011+%00) A) Find the Poles and Zeros....
 105- Problem #4 - Given the transfer function T(s)- ***(1+%o1+%0011+%00) A) Find the Poles and Zeros. B) Sketch the Bode plots for the magnitude and phase of the function. C) From the plot estimate the gain and phase at 1000 rad/s and compare to actual calculated values.
105- Problem #4 - Given the transfer function T(s)- ***(1+%o1+%0011+%00) A) Find the Poles and Zeros. B) Sketch the Bode plots for the magnitude and phase of the function. C) From the plot estimate the gain and phase at 1000 rad/s and compare to actual calculated values.
1. (20 points). A transfer function has the following zeros and poles: zero at s=-105 and s= poles at s-100 and s--1000. The magnitude of the transfer function at ω= 105 rad/s is equal 100. Find the...
 1. (20 points). A transfer function has the following zeros and poles: zero at s=-105 and s= poles at s-100 and s--1000. The magnitude of the transfer function at ω= 105 rad/s is equal 100. Find the transfer function T(s) and sketch Bode plots for the magnitude and phase, ˇ
1. (20 points). A transfer function has the following zeros and poles: zero at s=-105 and s= poles at s-100 and s--1000. The magnitude of the transfer function at ω=...
1. (20 points). A transfer function has the following zeros and poles: zero at s=-105 and s= poles at s-100 and s--1000. The magnitude of the transfer function at ω= 105 rad/s is equal 100. Find the transfer function T(s) and sketch Bode plots for the magnitude and phase, ˇ
1. (20 points). A transfer function has the following zeros and poles: zero at s=-105 and s= poles at s-100 and s--1000. The magnitude of the transfer function at ω=...
The transfer function of a linear system is G(s) = Y(s) S-1 U(s) 5? + 4s...
 The transfer function of a linear system is G(s) = Y(s) S-1 U(s) 5? + 4s +3 a. Express this system in the modal form. b. Express this system in the standard controllable form (SCF). (Parts d, e, f, and g use this system) c. In the standard controllable form, suppose the output is replaced by y=[-1 a] | [x2] Give a value for a which makes the system unobservable. d. What is y(t) if y(0-)=-3, ay = 6 and...
The transfer function of a linear system is G(s) = Y(s) S-1 U(s) 5? + 4s +3 a. Express this system in the modal form. b. Express this system in the standard controllable form (SCF). (Parts d, e, f, and g use this system) c. In the standard controllable form, suppose the output is replaced by y=[-1 a] | [x2] Give a value for a which makes the system unobservable. d. What is y(t) if y(0-)=-3, ay = 6 and...
 1) Write a Matlab program for the following block diagram: a) to derive its closed-loop transfer function. b) to find and plot the poles-zeros of closed-loop transfer function. s+2s+3 R(s) → Y(s) 2s+3 2 +2s +5 15 Automatic Control Systen
1) Write a Matlab program for the following block diagram: a) to derive its closed-loop transfer function. b) to find and plot the poles-zeros of closed-loop transfer function. s+2s+3 R(s) → Y(s) 2s+3 2 +2s +5 15 Automatic Control Systen
1) Write a Matlab program for the following block diagram: a) to derive its closed-loop transfer function. b) to find and plot the poles-zeros of closed-loop transfer function. s+2s+3 R(s) → Y(s) 2s+3 2 +2s +5 15 Automatic Control Systen
1) Write a Matlab program for the following block diagram: a) to derive its closed-loop transfer function. b) to find and plot the poles-zeros of closed-loop transfer function. s+2s+3 R(s) → Y(s) 2s+3 2 +2s +5 15 Automatic Control Systen
 For the following systems, find the transfer function using MATLAB. Also, determine the poles and zeros of each transfer. You should be able to use some combination of the following MATLAB functions: 'ss2tf( )', 'ss( )', 'tf( )', 'pole( )', "zero( )', and 'roots() 100 ).y) = [0_1)|) 2 a. |x2(t)] -10 [x1 (t lx20 21 b. + 01 x1 (t) 0 x2(t) 1 u(t), y(t): ol]x3(t)] [(t)] x2(t) 3(t) [x1 (t)] [o 0 1x2(t) [x3(t)] -4 -2 0 2...
For the following systems, find the transfer function using MATLAB. Also, determine the poles and zeros of each transfer. You should be able to use some combination of the following MATLAB functions: 'ss2tf( )', 'ss( )', 'tf( )', 'pole( )', "zero( )', and 'roots() 100 ).y) = [0_1)|) 2 a. |x2(t)] -10 [x1 (t lx20 21 b. + 01 x1 (t) 0 x2(t) 1 u(t), y(t): ol]x3(t)] [(t)] x2(t) 3(t) [x1 (t)] [o 0 1x2(t) [x3(t)] -4 -2 0 2...
 Solve the following using MATLAB:
3. Consider the transfer function: H S ) = 6 2s2 + 6s 2s4 + 8 s +3 .4 L + 3 a) Write lines of code to find the zeros and poles of the above transfer function. b) Write lines of code to find a partial fraction expansion of the above transfer function.
Solve the following using MATLAB:
3. Consider the transfer function: H S ) = 6 2s2 + 6s 2s4 + 8 s +3 .4 L + 3 a) Write lines of code to find the zeros and poles of the above transfer function. b) Write lines of code to find a partial fraction expansion of the above transfer function.
 a.)Determine the values of the
poles and zeros of the closed loop system shown when the controller
gain kc = 0.
answer should be
no zeros
poles at s = 2.0 and -0.5 ± j
b.) Compare these with the open loop poles and zeros.
c.) Now determine the values of the poles and zeros at some very
high gain, say kc = 105 .
Determine the values of the poles and zeros of the closed loop system shown when...
a.)Determine the values of the
poles and zeros of the closed loop system shown when the controller
gain kc = 0.
answer should be
no zeros
poles at s = 2.0 and -0.5 ± j
b.) Compare these with the open loop poles and zeros.
c.) Now determine the values of the poles and zeros at some very
high gain, say kc = 105 .
Determine the values of the poles and zeros of the closed loop system shown when...
 Theroot-locus design method
(d) Gos)H(s)2) 5.5 Complex poles and zeros. For the systems with an open-loop transfer function given below, sketch the root locus plot. Find the asymptotes and their angles. the break-away or break-in points, the angle of arrival or departure for the complex poles and zeros, respectively, and the range of k for closed-loop stability 5 10ん k(s+21
(d) Gos)H(s)2) 5.5 Complex poles and zeros. For the systems with an open-loop transfer function given below, sketch the root...
Theroot-locus design method
(d) Gos)H(s)2) 5.5 Complex poles and zeros. For the systems with an open-loop transfer function given below, sketch the root locus plot. Find the asymptotes and their angles. the break-away or break-in points, the angle of arrival or departure for the complex poles and zeros, respectively, and the range of k for closed-loop stability 5 10ん k(s+21
(d) Gos)H(s)2) 5.5 Complex poles and zeros. For the systems with an open-loop transfer function given below, sketch the root...
 alpha = 5.0
beta = 7.1
zeta = 6.9
PROBLEM 1 (20 points). Given the filter with transfer function +28-1+-2 11(2) = 1-(α/10)2-4 (a2/100):-2 Use MATLAB to Find the zeros and poles of H() Plot the poles and zeros on the -plane. The pot should include the uit circle. Plot the magnitude response (in dB) Plot the phase response. Deliverables: Your MATLAB code used to solve Problem 1 and all the generated plots.
PROBLEM 1 (20 points). Given the filter...
alpha = 5.0
beta = 7.1
zeta = 6.9
PROBLEM 1 (20 points). Given the filter with transfer function +28-1+-2 11(2) = 1-(α/10)2-4 (a2/100):-2 Use MATLAB to Find the zeros and poles of H() Plot the poles and zeros on the -plane. The pot should include the uit circle. Plot the magnitude response (in dB) Plot the phase response. Deliverables: Your MATLAB code used to solve Problem 1 and all the generated plots.
PROBLEM 1 (20 points). Given the filter...
 105- Problem #4 - Given the transfer function T(s)- ***(1+%o1+%0011+%00) A) Find the Poles and Zeros. B) Sketch the Bode plots for the magnitude and phase of the function. C) From the plot estimate the gain and phase at 1000 rad/s and compare to actual calculated values.
105- Problem #4 - Given the transfer function T(s)- ***(1+%o1+%0011+%00) A) Find the Poles and Zeros. B) Sketch the Bode plots for the magnitude and phase of the function. C) From the plot estimate the gain and phase at 1000 rad/s and compare to actual calculated values.
 1. (20 points). A transfer function has the following zeros and poles: zero at s=-105 and s= poles at s-100 and s--1000. The magnitude of the transfer function at ω= 105 rad/s is equal 100. Find the transfer function T(s) and sketch Bode plots for the magnitude and phase, ˇ
1. (20 points). A transfer function has the following zeros and poles: zero at s=-105 and s= poles at s-100 and s--1000. The magnitude of the transfer function at ω=...
1. (20 points). A transfer function has the following zeros and poles: zero at s=-105 and s= poles at s-100 and s--1000. The magnitude of the transfer function at ω= 105 rad/s is equal 100. Find the transfer function T(s) and sketch Bode plots for the magnitude and phase, ˇ
1. (20 points). A transfer function has the following zeros and poles: zero at s=-105 and s= poles at s-100 and s--1000. The magnitude of the transfer function at ω=...
 The transfer function of a linear system is G(s) = Y(s) S-1 U(s) 5? + 4s +3 a. Express this system in the modal form. b. Express this system in the standard controllable form (SCF). (Parts d, e, f, and g use this system) c. In the standard controllable form, suppose the output is replaced by y=[-1 a] | [x2] Give a value for a which makes the system unobservable. d. What is y(t) if y(0-)=-3, ay = 6 and...
The transfer function of a linear system is G(s) = Y(s) S-1 U(s) 5? + 4s +3 a. Express this system in the modal form. b. Express this system in the standard controllable form (SCF). (Parts d, e, f, and g use this system) c. In the standard controllable form, suppose the output is replaced by y=[-1 a] | [x2] Give a value for a which makes the system unobservable. d. What is y(t) if y(0-)=-3, ay = 6 and...
Most questions answered within 3 hours.
-
Calculate the pH of each of the following solutions.
0.50 M HBr
3.1×10−4 M KOH
4.2×10−5...
asked 3 hours ago -
For the year ended December 31, Depot Max’s cost of merchandise
sold was $85,600. Inventory at the...
asked 3 hours ago -
Week 10 - Professional Memo Assignment
Professional Memo Assignment
Your mission for this week, should you...
asked 3 hours ago -
Write a Python program that stores the data for each
player on the team, and it...
asked 3 hours ago -
In
the last 3 months, mike never knows when he is going to get his
allowance...
asked 3 hours ago -
Is Ca(OH)2 a Bronsted base, Lewis base, or both? Why?
asked 3 hours ago -
1A- Why don’t voters complain about U.S. tariffs on imported
sugar?
Because sugar is only a...
asked 3 hours ago -
Cash Payback Period
Primera Banco is evaluating two capital investment proposals for
a drive-up ATM kiosk,...
asked 3 hours ago -
Create a button in Swift (Xcode) that will create a charge,
create a charge using Stripe's...
asked 3 hours ago -
The reaction rate of CO and NO2 in the reaction
CO(g) + NO2(g) → CO2(g) +...
asked 3 hours ago -
Imagine that a chemist puts 6.40 mol each of
C3H8 and O2 in a 1.00-L container...
asked 3 hours ago -
How much money should be invested today in order to have $8340
at the end of...
asked 4 hours ago