
Homework Answers


Add Answer to:
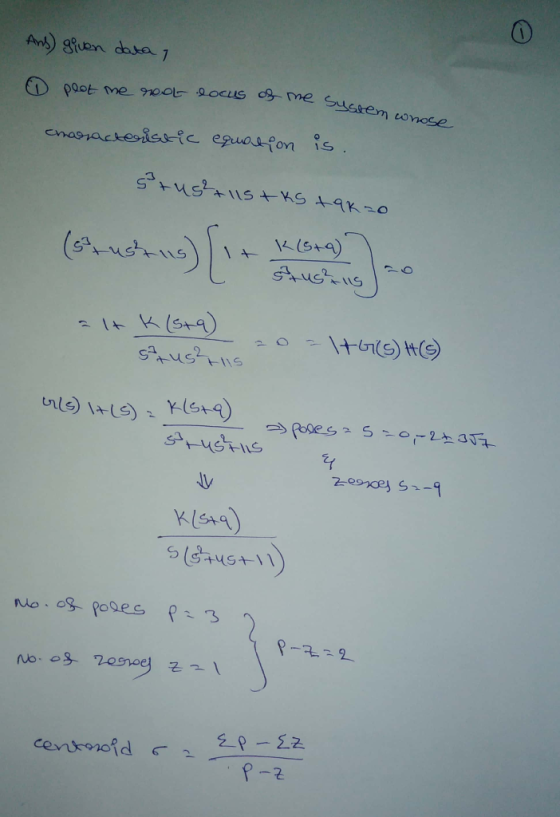
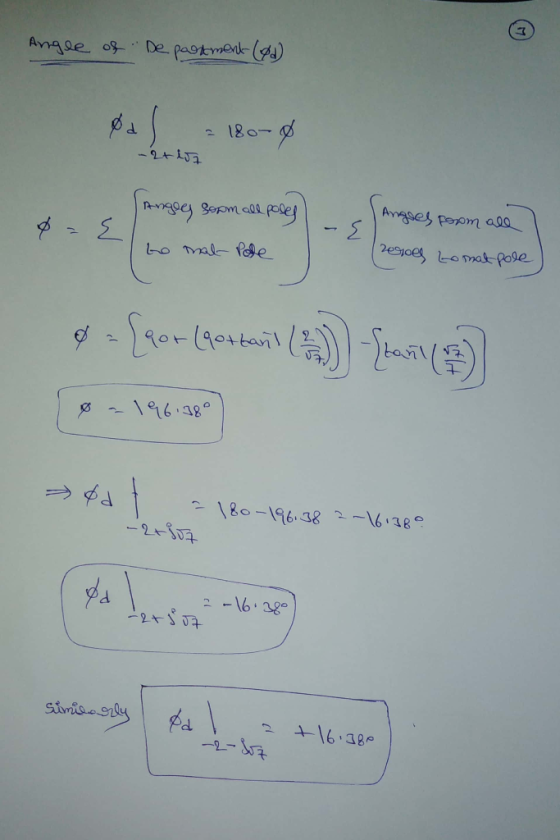
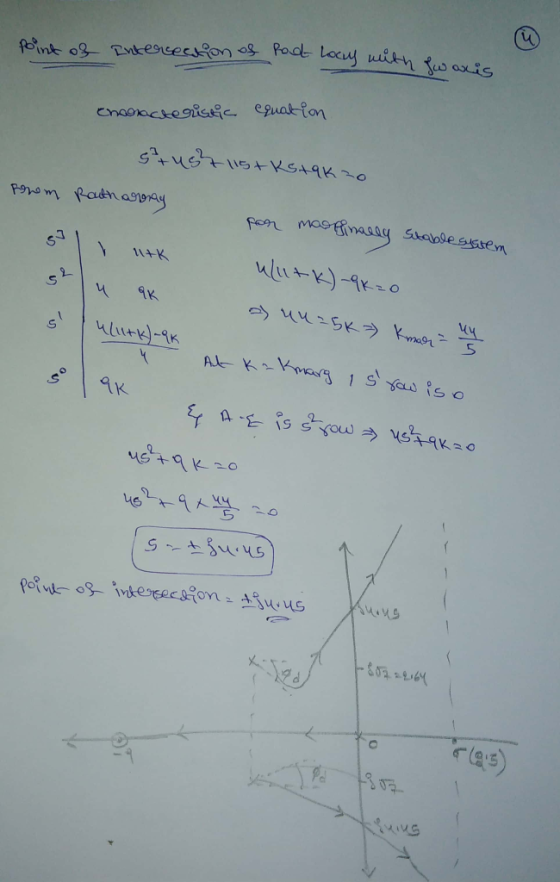
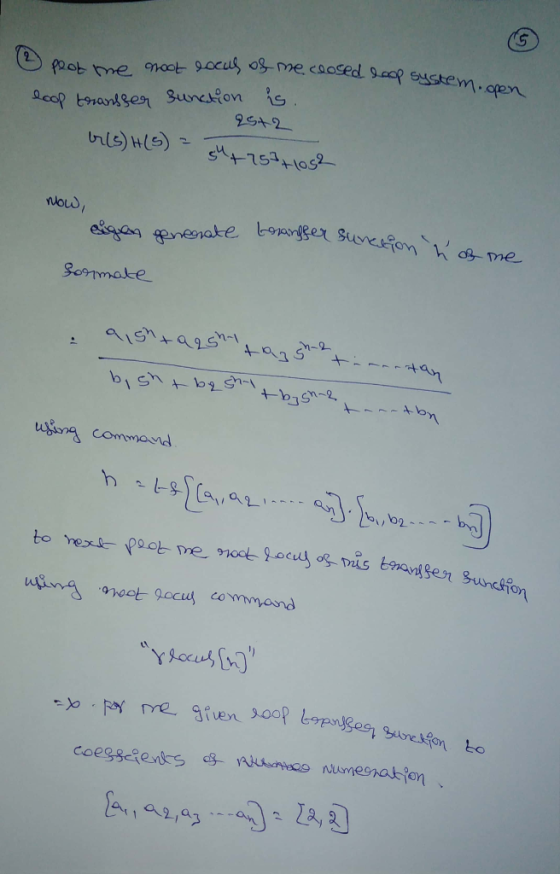
1) Plot the root locus of the system whose characteristic equation is 2) Plot the root locus of the closed loop system whose open-loop transfer function is given as 2s + 2 G(S)H(S)+7s3 +10s2 3)...
[7] Sketch the root locus for the unity feedback system whose open loop transfer function is K G(s) Draw the root locus...
 [7] Sketch the root locus for the unity feedback system whose open loop transfer function is K G(s) Draw the root locus of the system with the gain K as a variable s(s+4) (s2+4s+20)' Determine asymptotes, centroid,, breakaway point, angle of departure, and the gain at which root locus crosses jw -axis.
[7] Sketch the root locus for the unity feedback system whose open loop transfer function is K G(s) Draw the root locus of the system with the gain...
[7] Sketch the root locus for the unity feedback system whose open loop transfer function is K G(s) Draw the root locus of the system with the gain K as a variable s(s+4) (s2+4s+20)' Determine asymptotes, centroid,, breakaway point, angle of departure, and the gain at which root locus crosses jw -axis.
[7] Sketch the root locus for the unity feedback system whose open loop transfer function is K G(s) Draw the root locus of the system with the gain...
only b and c please 1 Consider the system whose transfer function is given by: G(S)...
 only b and c please
1 Consider the system whose transfer function is given by: G(S) == (2s +1)(s+3) unction is given by: G(s) - (a) Use the root-locus design methodology to design a lead compensator that will provide a closed-loop damping 5 =0.4 and a natural frequency on =9 rad/sec. The general transfer function for lead compensation is given by D(5)=K (977), p>z, 2=2 (b) Use MATLAB to plot the root locus of the feed-forward transfer function, D(s)*G(s), and...
only b and c please
1 Consider the system whose transfer function is given by: G(S) == (2s +1)(s+3) unction is given by: G(s) - (a) Use the root-locus design methodology to design a lead compensator that will provide a closed-loop damping 5 =0.4 and a natural frequency on =9 rad/sec. The general transfer function for lead compensation is given by D(5)=K (977), p>z, 2=2 (b) Use MATLAB to plot the root locus of the feed-forward transfer function, D(s)*G(s), and...
sketch the root locus of the system whose open loop transfer function is given by C(s)/...
sketch the root locus of the system whose open loop transfer function is given by C(s)/ R(s)=k/(s(s+4)(s2+s+1)+k)
sketch the root locus of the system whose open loop transfer function is given by C(s)/...
sketch the root locus of the system whose open loop transfer function is given by C(s)/ R(s)=k/(s(s+4)(s2+s+1)+k)
Sketch the root locus plot of a unity feedback system with an open loop transfer function...
Sketch the root locus plot of a unity feedback system with an open loop transfer function G(s) = K / s (s+2) (s+4) Determine the value of K so that the dominant pair of complex poles of the system has a damping ratio of 0.5.
Use rlocus in MATLAB to plot the root locus for a closed loop control system with the plant trans...
 Use rlocus in MATLAB to plot the root locus for a closed loop control system with the plant transfer function 8. z 2 2)2-0.1z +0.06 For what value of k is the closed loop system stable? 9. The characteristic equation for a control system is given as z2(0.2 +k)z 6k +2-0 Use Routh-Hurwitz criterion to find when the system is stable. 10. Use MATLAB to plot the root locus for the system given in Problem 9. Compare your conclusion in...
Use rlocus in MATLAB to plot the root locus for a closed loop control system with the plant transfer function 8. z 2 2)2-0.1z +0.06 For what value of k is the closed loop system stable? 9. The characteristic equation for a control system is given as z2(0.2 +k)z 6k +2-0 Use Routh-Hurwitz criterion to find when the system is stable. 10. Use MATLAB to plot the root locus for the system given in Problem 9. Compare your conclusion in...
[7] Sketch the root locus for the unity feedback system whose open loop transfer function is K G(s) Draw the root lo...
 [7] Sketch the root locus for the unity feedback system whose open loop transfer function is K G(s) Draw the root locus of the system with the gain Kas a variable. s(s+4) (s2+4s+20) Determine asymptotes, centroid, breakaway point, angle of departure, and the gain at which root locus crosses ja-axis. A control system with type-0 process and a PID controller is shown below. Design the [8 parameters of the PID controller so that the following specifications are satisfied. =100 a)...
[7] Sketch the root locus for the unity feedback system whose open loop transfer function is K G(s) Draw the root locus of the system with the gain Kas a variable. s(s+4) (s2+4s+20) Determine asymptotes, centroid, breakaway point, angle of departure, and the gain at which root locus crosses ja-axis. A control system with type-0 process and a PID controller is shown below. Design the [8 parameters of the PID controller so that the following specifications are satisfied. =100 a)...
Theroot-locus design method (d) Gos)H(s)2) 5.5 Complex poles and zeros. For the systems with an open-loop transfer function given below, sketch the root locus plot. Find the asymptotes and their angle...
 Theroot-locus design method
(d) Gos)H(s)2) 5.5 Complex poles and zeros. For the systems with an open-loop transfer function given below, sketch the root locus plot. Find the asymptotes and their angles. the break-away or break-in points, the angle of arrival or departure for the complex poles and zeros, respectively, and the range of k for closed-loop stability 5 10ん k(s+21
(d) Gos)H(s)2) 5.5 Complex poles and zeros. For the systems with an open-loop transfer function given below, sketch the root...
Theroot-locus design method
(d) Gos)H(s)2) 5.5 Complex poles and zeros. For the systems with an open-loop transfer function given below, sketch the root locus plot. Find the asymptotes and their angles. the break-away or break-in points, the angle of arrival or departure for the complex poles and zeros, respectively, and the range of k for closed-loop stability 5 10ん k(s+21
(d) Gos)H(s)2) 5.5 Complex poles and zeros. For the systems with an open-loop transfer function given below, sketch the root...
The characteristic equation (denominator of the closed-loop transfer function set equal to zero) is given s3 + 2s2 + (20K +7)s+ 100K Sketch the root locus of the given system above with respect to...
 The characteristic equation (denominator of the closed-loop transfer function set equal to zero) is given s3 + 2s2 + (20K +7)s+ 100K Sketch the root locus of the given system above with respect to K. [ Find the asymptotes and their angles, the break-away or break-in points, the angle of arrival or departure for the complex poles and zeros, imaginary axis crossing points, respectively (if any).
The characteristic equation (denominator of the closed-loop transfer function set equal to zero) is...
The characteristic equation (denominator of the closed-loop transfer function set equal to zero) is given s3 + 2s2 + (20K +7)s+ 100K Sketch the root locus of the given system above with respect to K. [ Find the asymptotes and their angles, the break-away or break-in points, the angle of arrival or departure for the complex poles and zeros, imaginary axis crossing points, respectively (if any).
The characteristic equation (denominator of the closed-loop transfer function set equal to zero) is...
Problem (2) The open loop transfer function of a feedback system is given by к H...
 Problem (2) The open loop transfer function of a feedback system is given by к H (s) = 10 G(s) = ------ - s (s +1) (0.2 s+ 1) Design a controller such that the closed loop system will have a settling time less than 1.0 sec. and a percentage overshoot (PO) less than 5%. Draw the root locus plots of the uncompensated and compensated systems using Matlab.
Problem (2) The open loop transfer function of a feedback system is given by к H (s) = 10 G(s) = ------ - s (s +1) (0.2 s+ 1) Design a controller such that the closed loop system will have a settling time less than 1.0 sec. and a percentage overshoot (PO) less than 5%. Draw the root locus plots of the uncompensated and compensated systems using Matlab.
 [7] Sketch the root locus for the unity feedback system whose open loop transfer function is K G(s) Draw the root locus of the system with the gain K as a variable s(s+4) (s2+4s+20)' Determine asymptotes, centroid,, breakaway point, angle of departure, and the gain at which root locus crosses jw -axis.
[7] Sketch the root locus for the unity feedback system whose open loop transfer function is K G(s) Draw the root locus of the system with the gain...
[7] Sketch the root locus for the unity feedback system whose open loop transfer function is K G(s) Draw the root locus of the system with the gain K as a variable s(s+4) (s2+4s+20)' Determine asymptotes, centroid,, breakaway point, angle of departure, and the gain at which root locus crosses jw -axis.
[7] Sketch the root locus for the unity feedback system whose open loop transfer function is K G(s) Draw the root locus of the system with the gain...
 only b and c please
1 Consider the system whose transfer function is given by: G(S) == (2s +1)(s+3) unction is given by: G(s) - (a) Use the root-locus design methodology to design a lead compensator that will provide a closed-loop damping 5 =0.4 and a natural frequency on =9 rad/sec. The general transfer function for lead compensation is given by D(5)=K (977), p>z, 2=2 (b) Use MATLAB to plot the root locus of the feed-forward transfer function, D(s)*G(s), and...
only b and c please
1 Consider the system whose transfer function is given by: G(S) == (2s +1)(s+3) unction is given by: G(s) - (a) Use the root-locus design methodology to design a lead compensator that will provide a closed-loop damping 5 =0.4 and a natural frequency on =9 rad/sec. The general transfer function for lead compensation is given by D(5)=K (977), p>z, 2=2 (b) Use MATLAB to plot the root locus of the feed-forward transfer function, D(s)*G(s), and...
 Use rlocus in MATLAB to plot the root locus for a closed loop control system with the plant transfer function 8. z 2 2)2-0.1z +0.06 For what value of k is the closed loop system stable? 9. The characteristic equation for a control system is given as z2(0.2 +k)z 6k +2-0 Use Routh-Hurwitz criterion to find when the system is stable. 10. Use MATLAB to plot the root locus for the system given in Problem 9. Compare your conclusion in...
Use rlocus in MATLAB to plot the root locus for a closed loop control system with the plant transfer function 8. z 2 2)2-0.1z +0.06 For what value of k is the closed loop system stable? 9. The characteristic equation for a control system is given as z2(0.2 +k)z 6k +2-0 Use Routh-Hurwitz criterion to find when the system is stable. 10. Use MATLAB to plot the root locus for the system given in Problem 9. Compare your conclusion in...
 [7] Sketch the root locus for the unity feedback system whose open loop transfer function is K G(s) Draw the root locus of the system with the gain Kas a variable. s(s+4) (s2+4s+20) Determine asymptotes, centroid, breakaway point, angle of departure, and the gain at which root locus crosses ja-axis. A control system with type-0 process and a PID controller is shown below. Design the [8 parameters of the PID controller so that the following specifications are satisfied. =100 a)...
[7] Sketch the root locus for the unity feedback system whose open loop transfer function is K G(s) Draw the root locus of the system with the gain Kas a variable. s(s+4) (s2+4s+20) Determine asymptotes, centroid, breakaway point, angle of departure, and the gain at which root locus crosses ja-axis. A control system with type-0 process and a PID controller is shown below. Design the [8 parameters of the PID controller so that the following specifications are satisfied. =100 a)...
 Theroot-locus design method
(d) Gos)H(s)2) 5.5 Complex poles and zeros. For the systems with an open-loop transfer function given below, sketch the root locus plot. Find the asymptotes and their angles. the break-away or break-in points, the angle of arrival or departure for the complex poles and zeros, respectively, and the range of k for closed-loop stability 5 10ん k(s+21
(d) Gos)H(s)2) 5.5 Complex poles and zeros. For the systems with an open-loop transfer function given below, sketch the root...
Theroot-locus design method
(d) Gos)H(s)2) 5.5 Complex poles and zeros. For the systems with an open-loop transfer function given below, sketch the root locus plot. Find the asymptotes and their angles. the break-away or break-in points, the angle of arrival or departure for the complex poles and zeros, respectively, and the range of k for closed-loop stability 5 10ん k(s+21
(d) Gos)H(s)2) 5.5 Complex poles and zeros. For the systems with an open-loop transfer function given below, sketch the root...
 The characteristic equation (denominator of the closed-loop transfer function set equal to zero) is given s3 + 2s2 + (20K +7)s+ 100K Sketch the root locus of the given system above with respect to K. [ Find the asymptotes and their angles, the break-away or break-in points, the angle of arrival or departure for the complex poles and zeros, imaginary axis crossing points, respectively (if any).
The characteristic equation (denominator of the closed-loop transfer function set equal to zero) is...
The characteristic equation (denominator of the closed-loop transfer function set equal to zero) is given s3 + 2s2 + (20K +7)s+ 100K Sketch the root locus of the given system above with respect to K. [ Find the asymptotes and their angles, the break-away or break-in points, the angle of arrival or departure for the complex poles and zeros, imaginary axis crossing points, respectively (if any).
The characteristic equation (denominator of the closed-loop transfer function set equal to zero) is...
 Problem (2) The open loop transfer function of a feedback system is given by к H (s) = 10 G(s) = ------ - s (s +1) (0.2 s+ 1) Design a controller such that the closed loop system will have a settling time less than 1.0 sec. and a percentage overshoot (PO) less than 5%. Draw the root locus plots of the uncompensated and compensated systems using Matlab.
Problem (2) The open loop transfer function of a feedback system is given by к H (s) = 10 G(s) = ------ - s (s +1) (0.2 s+ 1) Design a controller such that the closed loop system will have a settling time less than 1.0 sec. and a percentage overshoot (PO) less than 5%. Draw the root locus plots of the uncompensated and compensated systems using Matlab.
Most questions answered within 3 hours.
-
Part 1. Primitive Types, Sorting, Recursion for
Homework.java
a) Implement the static method initializeArray that receives...
asked 30 minutes ago -
Using C++, build a sorter that can rank a sequence of numbers in
a descending order....
asked 27 minutes ago -
Derive ground state term symbols. Use notation 2S(1/2) for state
2S1/2
a) d5
b) f3
c)...
asked 50 minutes ago -
A sample of size 31 will be drawn from a population with mean 39
and standard...
asked 1 hour ago -
What is the effect on the P-value when a test is changed from a
two-tailed hypothesis...
asked 1 hour ago -
I wish to estimate µ, the mean of a population. After I collect
and an-
alyze...
asked 2 hours ago -
At a local university, you poll a group of 115 students and find
that 37 of...
asked 1 hour ago -
Gladstone company tracks the number of units purchased and sold
throughout each accounting period but applies...
asked 1 hour ago -
When determining if a molecule's configuration is E or Z, what
determines the higher priority groups?
asked 1 hour ago -
13. What is the amount
of conversion cost transferred to finished goods? (Round
your intermediate calculations...
asked 1 hour ago -
Sulfuric Acid is a "strong" acid, but only releases a single
proton when it dissolves. What...
asked 1 hour ago -
The
second floor of a house is 6 m above the street level. How much
work...
asked 1 hour ago