&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&
Please wriite the matlab code of the question :)))
&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&
Homework Answers
Matlab code is given below in bold letters.
clc;
close all;
clear all;
% define the lapalce variable s
s = tf('s');
% define the plant
Gp = 1/(s^2+5*s+6);
% plot the root locus with proportional controller
% define gain k
k = 0:0.1:100;
figure;rlocus(Gp,k);
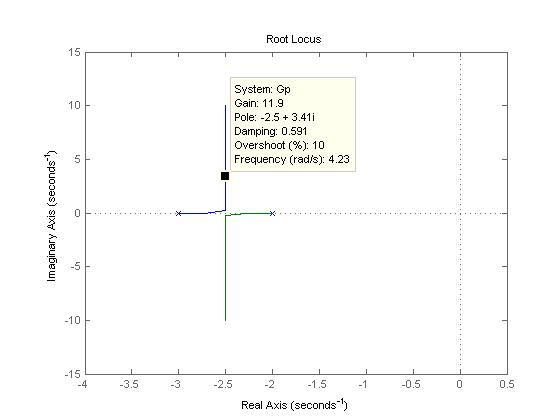
From the above figure, it is observed that the %overshoot is 10 % for a gain of 11.9.
Time constant = 1/2.5 = 0.4 sec
Therefore the settling time = 4*T = 4*0.4 = 1.6 sec.
% Question 2 integral controller
% MATLAB code is in bold letter
% plot the root lcous with integral controller alone
% define gain k
k = 0:0.1:100;
figure;rlocus(Gp/s,k);

From the above figure, it is observed that the %overshoot is 10 % for a gain of 4.4.
Time constant = 1/0.65 = 1.5385 sec
Therefore the settling time = 4*T = 4*1.5385 = 6.1538 sec.
% Question 3 Proportional + integral controller
% plot the root lcous with proportional integral controller
% define gain k
k = 0:0.1:100;
figure;rlocus(Gp*(s+1)/s,k);

From the above figure, it is observed that the % overshoot is 10 % for a gain of 10.
Time constant = 1/2.11= 0.4739sec
Therefore the settling time = 4*T = 4*0.4739 = 1.8957sec.
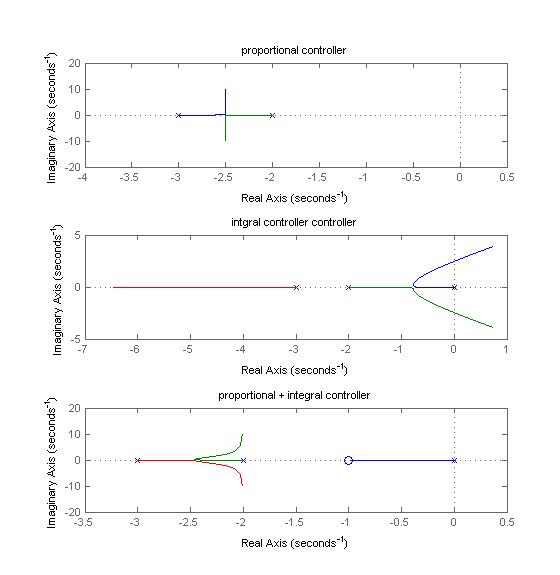
% Question d
figure;
subplot(311);
rlocus(Gp,k);
title('proportional controller');
subplot(312);
rlocus(Gp/s,k);
title('intgral controller controller');
subplot(313);
rlocus(Gp*(s+1)/s,k);
title('proportional + integral controller');
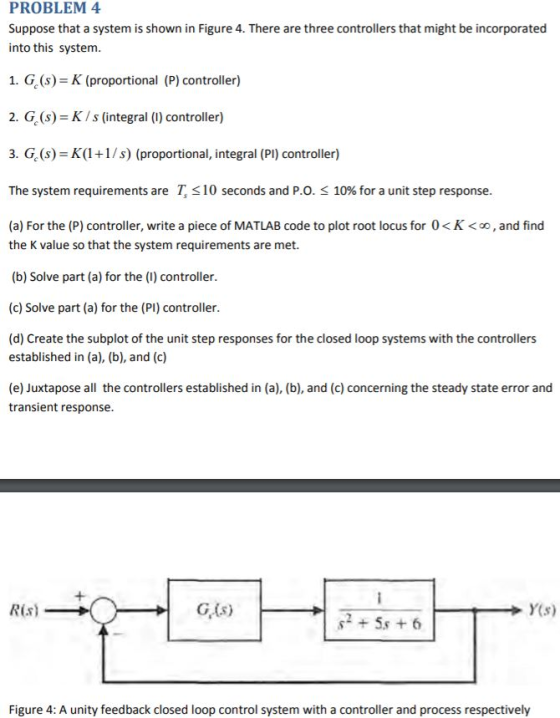
PROBLEM 4 Suppose that a system is shown in Figure 4. There are three controllers that might be incorporated into this system. 1. Ge (s)-K (proportional (P) controller) 2. GS)K/s (integral (I) contro...
 PROBLEM 4 Suppose that a system is shown in Figure 4. There are three controllers that might be incorporated into this system. 1. Ge (s)-K (proportional (P) controller) 2. GS)K/s (integral (I) controller) 3. G (s)K(1+1/s) (proportional, integral (PI) controller) The system requirements are T, < 10 seconds and P0 10% for a unit step response. (a) For the (P) controller, write a piece of MATLAB code to plot root locus for 0<K<,and find the K value so that the...
PROBLEM 4 Suppose that a system is shown in Figure 4. There are three controllers that might be incorporated into this system. 1. Ge (s)-K (proportional (P) controller) 2. GS)K/s (integral (I) controller) 3. G (s)K(1+1/s) (proportional, integral (PI) controller) The system requirements are T, < 10 seconds and P0 10% for a unit step response. (a) For the (P) controller, write a piece of MATLAB code to plot root locus for 0<K<,and find the K value so that the...
PLEASE solve it with MATLAB code A unity feedback closed loop control system is displayed in...
 PLEASE solve it with MATLAB code
A unity feedback closed loop control system is displayed in Figure 4 (a) Assume that the controller is given by G (s)-2. Based on the Isim function of MATLAB, calculate and obtain the graph of the response for 6, (t)-at. Here a : 0.5%, Find the height error after 10 seconds, G) -2 This is a Proportional-Integral (PI) controller. Repeat part (a) in the presence of Pl controller, and juxtapose the steady state error...
PLEASE solve it with MATLAB code
A unity feedback closed loop control system is displayed in Figure 4 (a) Assume that the controller is given by G (s)-2. Based on the Isim function of MATLAB, calculate and obtain the graph of the response for 6, (t)-at. Here a : 0.5%, Find the height error after 10 seconds, G) -2 This is a Proportional-Integral (PI) controller. Repeat part (a) in the presence of Pl controller, and juxtapose the steady state error...
PROBLEM 4 A unity feedback closed loop control system is displayed in Figure 4 (a) Assume that the controller is given by G (s)-2. Based on the lsim function of MATLAB, calculate and obtain the g...
 PROBLEM 4 A unity feedback closed loop control system is displayed in Figure 4 (a) Assume that the controller is given by G (s)-2. Based on the lsim function of MATLAB, calculate and obtain the graph of the response for 0,(1)-a. Here a ; 0.5%, Find the height error after 10 seconds, (b) In order to reduce the steady-state error, substitute G. (s) with the following controller: K2 This is a Proportional-Integral (PI) controller. Repeat part (a) in the presence...
PROBLEM 4 A unity feedback closed loop control system is displayed in Figure 4 (a) Assume that the controller is given by G (s)-2. Based on the lsim function of MATLAB, calculate and obtain the graph of the response for 0,(1)-a. Here a ; 0.5%, Find the height error after 10 seconds, (b) In order to reduce the steady-state error, substitute G. (s) with the following controller: K2 This is a Proportional-Integral (PI) controller. Repeat part (a) in the presence...
A unity feedback closed loop control system is displayed in Figure 4. (a) Assume that the control...
 Please solve as a MATLAB code.
A unity feedback closed loop control system is displayed in Figure 4. (a) Assume that the controller is given by G (s) 2. Based on the lsim function of MATLAB, calculate and obtain the graph of the response for (t) at. Here a 0.5°/s. Find the height error after 10 seconds, (b) In order to reduce the steady-state error, substitute G (s) with the following controller This is a Proportional-Integral (PI) controller. Repeat part...
Please solve as a MATLAB code.
A unity feedback closed loop control system is displayed in Figure 4. (a) Assume that the controller is given by G (s) 2. Based on the lsim function of MATLAB, calculate and obtain the graph of the response for (t) at. Here a 0.5°/s. Find the height error after 10 seconds, (b) In order to reduce the steady-state error, substitute G (s) with the following controller This is a Proportional-Integral (PI) controller. Repeat part...
Consider a unity-feedback control system with a PI controller Gpr(s) and a plant G(s) in cascade. In particular, the plant transfer function is given as 2. G(s) = s+4, and the PI controller trans...
 Consider a unity-feedback control system with a PI controller Gpr(s) and a plant G(s) in cascade. In particular, the plant transfer function is given as 2. G(s) = s+4, and the PI controller transfer function is of the forrm KI p and Ki are the proportional and integral controller gains, respectively where K Design numerical values for Kp and Ki such that the closed-loop control system has a step- response settling time T, 0.5 seconds with a damping ratio of...
Consider a unity-feedback control system with a PI controller Gpr(s) and a plant G(s) in cascade. In particular, the plant transfer function is given as 2. G(s) = s+4, and the PI controller transfer function is of the forrm KI p and Ki are the proportional and integral controller gains, respectively where K Design numerical values for Kp and Ki such that the closed-loop control system has a step- response settling time T, 0.5 seconds with a damping ratio of...
1. Consider the following feedback control system Controller Process 1 G(s) R(s) Y(s) $2+5s+6 Below are...
 1. Consider the following feedback control system Controller Process 1 G(s) R(s) Y(s) $2+5s+6 Below are two potential controllers for this system: 1) Ge(s) K (Proportional controller) 2) Ge(s) K(1 1/s) (Proportional-integral controller) The design specifications are t 3.2s and P. 0. 10% for a unit step input (a) Determine the area on the S-plane where the dominant closed loop poles must be located such that the design requirements are satisfied. (b) Sketch the root locus with each of the...
1. Consider the following feedback control system Controller Process 1 G(s) R(s) Y(s) $2+5s+6 Below are two potential controllers for this system: 1) Ge(s) K (Proportional controller) 2) Ge(s) K(1 1/s) (Proportional-integral controller) The design specifications are t 3.2s and P. 0. 10% for a unit step input (a) Determine the area on the S-plane where the dominant closed loop poles must be located such that the design requirements are satisfied. (b) Sketch the root locus with each of the...
I have no more posting for this month, please solve these for me thanks 1. Given...
 I have no more posting for this month, please solve these for me
thanks
1. Given the following unity feedback system where s+z s2 (s + 10) and the controller is a proportional controller Ge = K, do the following: a. If z = 2, find K so that the damped frequency of the oscillation of the transient response is 5 rad/s. b. The system is to be redesigned by changing the values of z and K. If the new...
I have no more posting for this month, please solve these for me
thanks
1. Given the following unity feedback system where s+z s2 (s + 10) and the controller is a proportional controller Ge = K, do the following: a. If z = 2, find K so that the damped frequency of the oscillation of the transient response is 5 rad/s. b. The system is to be redesigned by changing the values of z and K. If the new...
PLEASE SOLVE IN MATLAB !!!!!! PLEASE SOLVE IN MATLAB !!!!!! PLEASE SOLVE IN MATLAB !!!!!! PLEASE SOLVE IN MATLAB !!!!!! PLEASE SOLVE IN MATLAB !!!!!! PLEASE SOLVE IN MATLAB !!!!!! PLEASE SOLVE IN MAT...
 PLEASE SOLVE IN MATLAB !!!!!! PLEASE SOLVE IN MATLAB !!!!!!
PLEASE SOLVE IN MATLAB !!!!!! PLEASE SOLVE IN MATLAB !!!!!! PLEASE
SOLVE IN MATLAB !!!!!! PLEASE SOLVE IN MATLAB !!!!!! PLEASE SOLVE
IN MATLAB !!!!!! PLEASE SOLVE IN MATLAB !!!!!! PLEASE SOLVE IN
MATLAB !!!!!!
PROBLEM 3 The system in Figure 3 comprises a motor and a contoller. The performance requirements entail a steady state error for ramp input r(t)-Ct, smaller than 0.01C. Here, C is a constant. The overshoot...
PLEASE SOLVE IN MATLAB !!!!!! PLEASE SOLVE IN MATLAB !!!!!!
PLEASE SOLVE IN MATLAB !!!!!! PLEASE SOLVE IN MATLAB !!!!!! PLEASE
SOLVE IN MATLAB !!!!!! PLEASE SOLVE IN MATLAB !!!!!! PLEASE SOLVE
IN MATLAB !!!!!! PLEASE SOLVE IN MATLAB !!!!!! PLEASE SOLVE IN
MATLAB !!!!!!
PROBLEM 3 The system in Figure 3 comprises a motor and a contoller. The performance requirements entail a steady state error for ramp input r(t)-Ct, smaller than 0.01C. Here, C is a constant. The overshoot...
PLEASE USE MATLAB TO ANSWER ALL OF THE PARTS. PROVIDE MATLAB CODE FOR EACH OF THE...
 PLEASE USE MATLAB TO ANSWER ALL OF THE
PARTS.
PROVIDE MATLAB CODE FOR EACH OF THE PART.
PUT THE ANSWER IN A BOX.
Consider the unity feedback system depicted in Figure 1 G(s) R(s) 50K s(s + a) Figure 1 1. Determine the system's closed loop transfer function. 2. Plot the system's step response for K=10 and: • a= 2 • a=5 • a= 10 3. What happens to the system's response as a increases? Justify your answer. 4. In...
PLEASE USE MATLAB TO ANSWER ALL OF THE
PARTS.
PROVIDE MATLAB CODE FOR EACH OF THE PART.
PUT THE ANSWER IN A BOX.
Consider the unity feedback system depicted in Figure 1 G(s) R(s) 50K s(s + a) Figure 1 1. Determine the system's closed loop transfer function. 2. Plot the system's step response for K=10 and: • a= 2 • a=5 • a= 10 3. What happens to the system's response as a increases? Justify your answer. 4. In...
The transfer function of a position control system, with load angular position as an output and...
 The transfer function of a position control system, with load angular position as an output and motor armature voltage, is given as G(s) : s(s + 10) For this system design the following controllers 1. Proportional controller to obtain { = 0.7 2. PD controller to obtain { = 0.7 and 2% steady-state error due to a ramp input. 3. PI controller to have a dominant pair of poles with { = 0.7 , wn = 4 rad/sec and zero...
The transfer function of a position control system, with load angular position as an output and motor armature voltage, is given as G(s) : s(s + 10) For this system design the following controllers 1. Proportional controller to obtain { = 0.7 2. PD controller to obtain { = 0.7 and 2% steady-state error due to a ramp input. 3. PI controller to have a dominant pair of poles with { = 0.7 , wn = 4 rad/sec and zero...
 PROBLEM 4 Suppose that a system is shown in Figure 4. There are three controllers that might be incorporated into this system. 1. Ge (s)-K (proportional (P) controller) 2. GS)K/s (integral (I) controller) 3. G (s)K(1+1/s) (proportional, integral (PI) controller) The system requirements are T, < 10 seconds and P0 10% for a unit step response. (a) For the (P) controller, write a piece of MATLAB code to plot root locus for 0<K<,and find the K value so that the...
PROBLEM 4 Suppose that a system is shown in Figure 4. There are three controllers that might be incorporated into this system. 1. Ge (s)-K (proportional (P) controller) 2. GS)K/s (integral (I) controller) 3. G (s)K(1+1/s) (proportional, integral (PI) controller) The system requirements are T, < 10 seconds and P0 10% for a unit step response. (a) For the (P) controller, write a piece of MATLAB code to plot root locus for 0<K<,and find the K value so that the...
 PLEASE solve it with MATLAB code
A unity feedback closed loop control system is displayed in Figure 4 (a) Assume that the controller is given by G (s)-2. Based on the Isim function of MATLAB, calculate and obtain the graph of the response for 6, (t)-at. Here a : 0.5%, Find the height error after 10 seconds, G) -2 This is a Proportional-Integral (PI) controller. Repeat part (a) in the presence of Pl controller, and juxtapose the steady state error...
PLEASE solve it with MATLAB code
A unity feedback closed loop control system is displayed in Figure 4 (a) Assume that the controller is given by G (s)-2. Based on the Isim function of MATLAB, calculate and obtain the graph of the response for 6, (t)-at. Here a : 0.5%, Find the height error after 10 seconds, G) -2 This is a Proportional-Integral (PI) controller. Repeat part (a) in the presence of Pl controller, and juxtapose the steady state error...
 PROBLEM 4 A unity feedback closed loop control system is displayed in Figure 4 (a) Assume that the controller is given by G (s)-2. Based on the lsim function of MATLAB, calculate and obtain the graph of the response for 0,(1)-a. Here a ; 0.5%, Find the height error after 10 seconds, (b) In order to reduce the steady-state error, substitute G. (s) with the following controller: K2 This is a Proportional-Integral (PI) controller. Repeat part (a) in the presence...
PROBLEM 4 A unity feedback closed loop control system is displayed in Figure 4 (a) Assume that the controller is given by G (s)-2. Based on the lsim function of MATLAB, calculate and obtain the graph of the response for 0,(1)-a. Here a ; 0.5%, Find the height error after 10 seconds, (b) In order to reduce the steady-state error, substitute G. (s) with the following controller: K2 This is a Proportional-Integral (PI) controller. Repeat part (a) in the presence...
 Please solve as a MATLAB code.
A unity feedback closed loop control system is displayed in Figure 4. (a) Assume that the controller is given by G (s) 2. Based on the lsim function of MATLAB, calculate and obtain the graph of the response for (t) at. Here a 0.5°/s. Find the height error after 10 seconds, (b) In order to reduce the steady-state error, substitute G (s) with the following controller This is a Proportional-Integral (PI) controller. Repeat part...
Please solve as a MATLAB code.
A unity feedback closed loop control system is displayed in Figure 4. (a) Assume that the controller is given by G (s) 2. Based on the lsim function of MATLAB, calculate and obtain the graph of the response for (t) at. Here a 0.5°/s. Find the height error after 10 seconds, (b) In order to reduce the steady-state error, substitute G (s) with the following controller This is a Proportional-Integral (PI) controller. Repeat part...
 Consider a unity-feedback control system with a PI controller Gpr(s) and a plant G(s) in cascade. In particular, the plant transfer function is given as 2. G(s) = s+4, and the PI controller transfer function is of the forrm KI p and Ki are the proportional and integral controller gains, respectively where K Design numerical values for Kp and Ki such that the closed-loop control system has a step- response settling time T, 0.5 seconds with a damping ratio of...
Consider a unity-feedback control system with a PI controller Gpr(s) and a plant G(s) in cascade. In particular, the plant transfer function is given as 2. G(s) = s+4, and the PI controller transfer function is of the forrm KI p and Ki are the proportional and integral controller gains, respectively where K Design numerical values for Kp and Ki such that the closed-loop control system has a step- response settling time T, 0.5 seconds with a damping ratio of...
 1. Consider the following feedback control system Controller Process 1 G(s) R(s) Y(s) $2+5s+6 Below are two potential controllers for this system: 1) Ge(s) K (Proportional controller) 2) Ge(s) K(1 1/s) (Proportional-integral controller) The design specifications are t 3.2s and P. 0. 10% for a unit step input (a) Determine the area on the S-plane where the dominant closed loop poles must be located such that the design requirements are satisfied. (b) Sketch the root locus with each of the...
1. Consider the following feedback control system Controller Process 1 G(s) R(s) Y(s) $2+5s+6 Below are two potential controllers for this system: 1) Ge(s) K (Proportional controller) 2) Ge(s) K(1 1/s) (Proportional-integral controller) The design specifications are t 3.2s and P. 0. 10% for a unit step input (a) Determine the area on the S-plane where the dominant closed loop poles must be located such that the design requirements are satisfied. (b) Sketch the root locus with each of the...
 I have no more posting for this month, please solve these for me
thanks
1. Given the following unity feedback system where s+z s2 (s + 10) and the controller is a proportional controller Ge = K, do the following: a. If z = 2, find K so that the damped frequency of the oscillation of the transient response is 5 rad/s. b. The system is to be redesigned by changing the values of z and K. If the new...
I have no more posting for this month, please solve these for me
thanks
1. Given the following unity feedback system where s+z s2 (s + 10) and the controller is a proportional controller Ge = K, do the following: a. If z = 2, find K so that the damped frequency of the oscillation of the transient response is 5 rad/s. b. The system is to be redesigned by changing the values of z and K. If the new...
 PLEASE SOLVE IN MATLAB !!!!!! PLEASE SOLVE IN MATLAB !!!!!!
PLEASE SOLVE IN MATLAB !!!!!! PLEASE SOLVE IN MATLAB !!!!!! PLEASE
SOLVE IN MATLAB !!!!!! PLEASE SOLVE IN MATLAB !!!!!! PLEASE SOLVE
IN MATLAB !!!!!! PLEASE SOLVE IN MATLAB !!!!!! PLEASE SOLVE IN
MATLAB !!!!!!
PROBLEM 3 The system in Figure 3 comprises a motor and a contoller. The performance requirements entail a steady state error for ramp input r(t)-Ct, smaller than 0.01C. Here, C is a constant. The overshoot...
PLEASE SOLVE IN MATLAB !!!!!! PLEASE SOLVE IN MATLAB !!!!!!
PLEASE SOLVE IN MATLAB !!!!!! PLEASE SOLVE IN MATLAB !!!!!! PLEASE
SOLVE IN MATLAB !!!!!! PLEASE SOLVE IN MATLAB !!!!!! PLEASE SOLVE
IN MATLAB !!!!!! PLEASE SOLVE IN MATLAB !!!!!! PLEASE SOLVE IN
MATLAB !!!!!!
PROBLEM 3 The system in Figure 3 comprises a motor and a contoller. The performance requirements entail a steady state error for ramp input r(t)-Ct, smaller than 0.01C. Here, C is a constant. The overshoot...
 PLEASE USE MATLAB TO ANSWER ALL OF THE
PARTS.
PROVIDE MATLAB CODE FOR EACH OF THE PART.
PUT THE ANSWER IN A BOX.
Consider the unity feedback system depicted in Figure 1 G(s) R(s) 50K s(s + a) Figure 1 1. Determine the system's closed loop transfer function. 2. Plot the system's step response for K=10 and: • a= 2 • a=5 • a= 10 3. What happens to the system's response as a increases? Justify your answer. 4. In...
PLEASE USE MATLAB TO ANSWER ALL OF THE
PARTS.
PROVIDE MATLAB CODE FOR EACH OF THE PART.
PUT THE ANSWER IN A BOX.
Consider the unity feedback system depicted in Figure 1 G(s) R(s) 50K s(s + a) Figure 1 1. Determine the system's closed loop transfer function. 2. Plot the system's step response for K=10 and: • a= 2 • a=5 • a= 10 3. What happens to the system's response as a increases? Justify your answer. 4. In...
 The transfer function of a position control system, with load angular position as an output and motor armature voltage, is given as G(s) : s(s + 10) For this system design the following controllers 1. Proportional controller to obtain { = 0.7 2. PD controller to obtain { = 0.7 and 2% steady-state error due to a ramp input. 3. PI controller to have a dominant pair of poles with { = 0.7 , wn = 4 rad/sec and zero...
The transfer function of a position control system, with load angular position as an output and motor armature voltage, is given as G(s) : s(s + 10) For this system design the following controllers 1. Proportional controller to obtain { = 0.7 2. PD controller to obtain { = 0.7 and 2% steady-state error due to a ramp input. 3. PI controller to have a dominant pair of poles with { = 0.7 , wn = 4 rad/sec and zero...
Most questions answered within 3 hours.
-
Please help me with FLOWCHART and UML diagram for class,
thank you!
#include <iostream>
#include <fstream>...
asked 36 minutes ago -
3. Describe the “logic circuit” of the Lac operon. Which
proteins are bound or not to...
asked 37 minutes ago -
Ayesha’s adjusted gross income is $60,000 in 2019. She donated a
piece of artwork with a...
asked 43 minutes ago -
For Dijkstra’s shortest path algorithm:
a. Give the Big-O time for Dijkstra’s shortest path algorithm
and...
asked 55 minutes ago -
Phosphorus violates the 'octet rule' in biological molecules,
forming more covalent bonds than expected based on...
asked 59 minutes ago -
A 1.3 eV electron has a 10-4 probability of tunneling
through a 2.4 eV potential barrier....
asked 1 hour ago -
What is the one ingredient that is common to being successful
with all stakeholders?
profit
trust...
asked 1 hour ago -
Write an assembly language 32 bit program that reads in lines of
text by a .txt...
asked 1 hour ago -
what is the density ( in g/L) of hydrogen gas at 29 degrees C and a...
asked 1 hour ago -
5-6. You are considering three investment alternatives for some
spare cash: Old Reliable Corporation stock (A1),...
asked 1 hour ago -
Problem 16-02
Receivables Investment
Medwig Corporation has a DSO of 45 days. The company averages
$7,250...
asked 1 hour ago -
Mr. Brown hired Lowe's Maintenance Services Limited to repair
and paint the exterior wall of his...
asked 1 hour ago