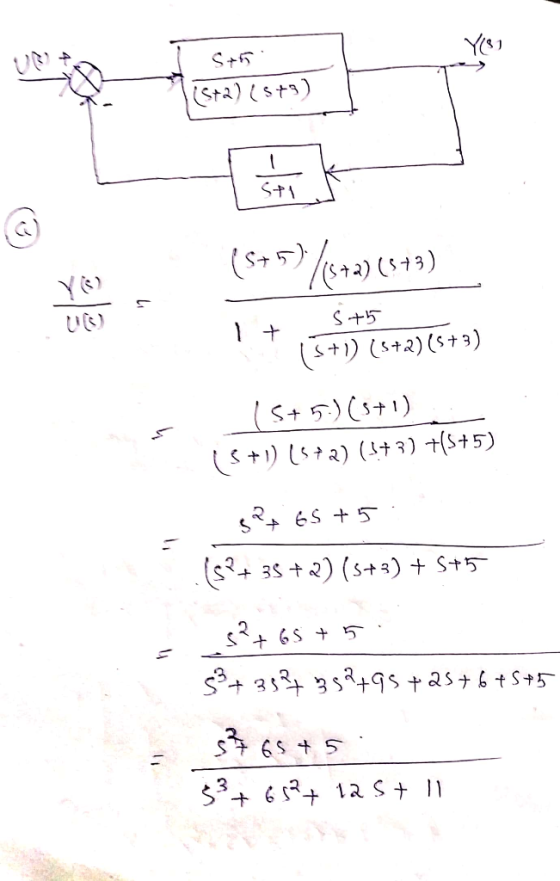
a-obtain state space representation
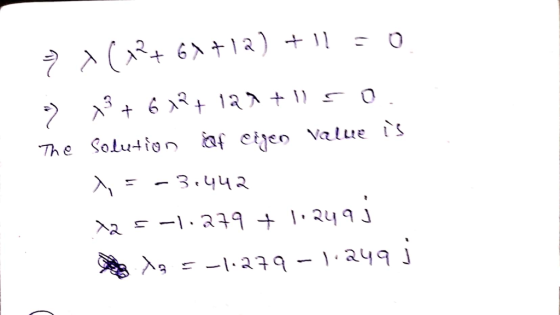
b-obtain system eigen values
c-diagnolize the system
Homework Answers


Add Answer to:
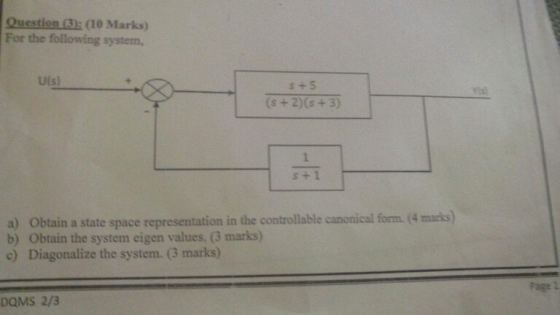
a-obtain state space representation b-obtain system eigen values c-diagnolize the system Question (3: (10 Marks) For...
i dont understand this problem. please show how to solve all parts using MATLAB. thank you. State-Space Representation and Analysis csys canon(sys,type) compute a canonical state-space realization...
 i dont understand this problem. please show how to solve all
parts using MATLAB. thank you.
State-Space Representation and Analysis csys canon(sys,type) compute a canonical state-space realization type 'companion': controllable canonical form type modal: modal canonical form poles of a system controllability matrix observability matrix eig(A) ctrb(A,B) obsv(A,C) -7 L-12 0 EX A 2C-ioD0 uestions () Define the system in the state-space form (2) Determine the stability of the system (3) Determine the controllability and the observability of the system....
i dont understand this problem. please show how to solve all
parts using MATLAB. thank you.
State-Space Representation and Analysis csys canon(sys,type) compute a canonical state-space realization type 'companion': controllable canonical form type modal: modal canonical form poles of a system controllability matrix observability matrix eig(A) ctrb(A,B) obsv(A,C) -7 L-12 0 EX A 2C-ioD0 uestions () Define the system in the state-space form (2) Determine the stability of the system (3) Determine the controllability and the observability of the system....
Convert following the transfer function into state space representation (Marks 5) 3 +45² T($) = 54...
 Convert following the transfer function into state space representation (Marks 5) 3 +45² T($) = 54 +52 +7 Convert the following state space into a transfer function. (Marks 5) x = 11 * = x + ( u 21 y = [02]x + [2]u Evaluate the steady-state error of state-space system. (Marks 5) i [ 10] [21. *= 15 2]* +11 y = [ 02]x + [2]u Evaluate the steady-state error of state-space system. (Marks 5) -1 0x+lu x =...
Convert following the transfer function into state space representation (Marks 5) 3 +45² T($) = 54 +52 +7 Convert the following state space into a transfer function. (Marks 5) x = 11 * = x + ( u 21 y = [02]x + [2]u Evaluate the steady-state error of state-space system. (Marks 5) i [ 10] [21. *= 15 2]* +11 y = [ 02]x + [2]u Evaluate the steady-state error of state-space system. (Marks 5) -1 0x+lu x =...
could you please answer this question QUESTION 2 Consider a system with an open-loop trans fer function given by Y(s) s+7 U(s) s2 +3s-8 (a) (8 marks) Derive a state-space model for the system in...
 could you please answer this question
QUESTION 2 Consider a system with an open-loop trans fer function given by Y(s) s+7 U(s) s2 +3s-8 (a) (8 marks) Derive a state-space model for the system in canonical form. (b) (4 marks) Check the observability of the system. (c) 8 marks) Design a suitable full-order state observer for the system. Explain your choice of the observer's poles. d) (10 marks) Design a PI controller for the system so the output of the...
could you please answer this question
QUESTION 2 Consider a system with an open-loop trans fer function given by Y(s) s+7 U(s) s2 +3s-8 (a) (8 marks) Derive a state-space model for the system in canonical form. (b) (4 marks) Check the observability of the system. (c) 8 marks) Design a suitable full-order state observer for the system. Explain your choice of the observer's poles. d) (10 marks) Design a PI controller for the system so the output of the...
Consider a single input, single output system with transfer function 10 H(s)- s+10s +25s +100 Obtain a state-space...
 Consider a single input, single output system with transfer function 10 H(s)- s+10s +25s +100 Obtain a state-space model in observer canonical form for the system, and design a full state estimator for desired eigenvalues of -10.-20 and-30. What are the values of the estimator gain matrix?
Consider a single input, single output system with transfer function 10 H(s)- s+10s +25s +100 Obtain a state-space model in observer canonical form for the system, and design a full state estimator for...
Consider a single input, single output system with transfer function 10 H(s)- s+10s +25s +100 Obtain a state-space model in observer canonical form for the system, and design a full state estimator for desired eigenvalues of -10.-20 and-30. What are the values of the estimator gain matrix?
Consider a single input, single output system with transfer function 10 H(s)- s+10s +25s +100 Obtain a state-space model in observer canonical form for the system, and design a full state estimator for...
a-represent system in state space form? b-find output response y(t? c-design a state feedback gain controller? 3- A dyn...
 a-represent system in state space form?
b-find output response y(t?
c-design a state feedback gain controller?
3- A dynamic system is described by the following set of coupled linear ordinary differential equations: x1 + 2x1-4x2-5u x1-x2 + 4x1 + x2 = 5u EDQMS 2/3 Page 1 of 2 a. Represent the system in state-space form. b. For u(t) =1 and initial condition state vector x(0) = LII find the outp (10 marks) response y(t). c. Design a state feedback gain...
a-represent system in state space form?
b-find output response y(t?
c-design a state feedback gain controller?
3- A dynamic system is described by the following set of coupled linear ordinary differential equations: x1 + 2x1-4x2-5u x1-x2 + 4x1 + x2 = 5u EDQMS 2/3 Page 1 of 2 a. Represent the system in state-space form. b. For u(t) =1 and initial condition state vector x(0) = LII find the outp (10 marks) response y(t). c. Design a state feedback gain...
15% - 3 – A system has a state variable representation as below face) = (4)...
 15% - 3 – A system has a state variable representation as below face) = (4) (0) + (C) u(e) y(t) = (1 0)x(t) It is desired that the canonical diagonal form of the system to be fact) = (94) z(t) + (7) u(t) y(t) = (-5 5)2(t) Determine the parameters a, b and d to yield the required diagonal matrix.
15% - 3 – A system has a state variable representation as below face) = (4) (0) + (C) u(e) y(t) = (1 0)x(t) It is desired that the canonical diagonal form of the system to be fact) = (94) z(t) + (7) u(t) y(t) = (-5 5)2(t) Determine the parameters a, b and d to yield the required diagonal matrix.
in the figure, obtain the state-space representation of the syster thè 1. Consider the mechanical system...
 in the figure, obtain the state-space representation of the syster thè 1. Consider the mechanical system shown ssume y() is the output. (25 marks) ce representation of systel. ki lu k2
in the figure, obtain the state-space representation of the syster thè 1. Consider the mechanical system shown ssume y() is the output. (25 marks) ce representation of systel. ki lu k2
Can someone please explain how to solve the problem below? 6. State Space Systems: a. (5...
 Can someone please explain how to solve the problem below?
6. State Space Systems: a. (5 pts) Determine the state space system in controllable canonical form that implements the transfer function Y(s)_ 252 +5 U(s) s+4s+7s +12 b. (10 pts) For the state space system given below, design a controller u =-Kx+v such that the eigenvalues of the closed loop system are -10, – 20. To 17 , y = Cx C = [25] x = Ax+Bu with A= ln...
Can someone please explain how to solve the problem below?
6. State Space Systems: a. (5 pts) Determine the state space system in controllable canonical form that implements the transfer function Y(s)_ 252 +5 U(s) s+4s+7s +12 b. (10 pts) For the state space system given below, design a controller u =-Kx+v such that the eigenvalues of the closed loop system are -10, – 20. To 17 , y = Cx C = [25] x = Ax+Bu with A= ln...
A state space representation of a system is below, 1 1 TO La 1 b] +...
 A state space representation of a system is below, 1 1 TO La 1 b] + (0.5 y=[0 c]a 9.$+ Given that a = -14, b = -2, and c=6, what is its transfer function ? U(s) in the form of 1 com s+p, stro Please derive your expression and then match its coefficients to the given form carefully and then fill in the blanks below.
A state space representation of a system is below, 1 1 TO La 1 b] + (0.5 y=[0 c]a 9.$+ Given that a = -14, b = -2, and c=6, what is its transfer function ? U(s) in the form of 1 com s+p, stro Please derive your expression and then match its coefficients to the given form carefully and then fill in the blanks below.
Please only solve part C Assume the following state space representation of a discrete-time servomotor system. (As a review for the Final Exam, you might check this state space representation with th...
 Please only solve part C
Assume the following state space representation of a discrete-time servomotor system. (As a review for the Final Exam, you might check this state space representation with the difference equation in Problem 1 on Homework 2. This parenthetical comment is not a required part for Homework 8.) 2. 0.048371 u(n) 1.9048x(n) lo.04679 [1,0]x(n) y(n) Compute the open-loop eigenvalues of the system. That is, find the eigenvalues of Ф. Check controllability of the system. Or, answer the...
Please only solve part C
Assume the following state space representation of a discrete-time servomotor system. (As a review for the Final Exam, you might check this state space representation with the difference equation in Problem 1 on Homework 2. This parenthetical comment is not a required part for Homework 8.) 2. 0.048371 u(n) 1.9048x(n) lo.04679 [1,0]x(n) y(n) Compute the open-loop eigenvalues of the system. That is, find the eigenvalues of Ф. Check controllability of the system. Or, answer the...
 i dont understand this problem. please show how to solve all
parts using MATLAB. thank you.
State-Space Representation and Analysis csys canon(sys,type) compute a canonical state-space realization type 'companion': controllable canonical form type modal: modal canonical form poles of a system controllability matrix observability matrix eig(A) ctrb(A,B) obsv(A,C) -7 L-12 0 EX A 2C-ioD0 uestions () Define the system in the state-space form (2) Determine the stability of the system (3) Determine the controllability and the observability of the system....
i dont understand this problem. please show how to solve all
parts using MATLAB. thank you.
State-Space Representation and Analysis csys canon(sys,type) compute a canonical state-space realization type 'companion': controllable canonical form type modal: modal canonical form poles of a system controllability matrix observability matrix eig(A) ctrb(A,B) obsv(A,C) -7 L-12 0 EX A 2C-ioD0 uestions () Define the system in the state-space form (2) Determine the stability of the system (3) Determine the controllability and the observability of the system....
 Convert following the transfer function into state space representation (Marks 5) 3 +45² T($) = 54 +52 +7 Convert the following state space into a transfer function. (Marks 5) x = 11 * = x + ( u 21 y = [02]x + [2]u Evaluate the steady-state error of state-space system. (Marks 5) i [ 10] [21. *= 15 2]* +11 y = [ 02]x + [2]u Evaluate the steady-state error of state-space system. (Marks 5) -1 0x+lu x =...
Convert following the transfer function into state space representation (Marks 5) 3 +45² T($) = 54 +52 +7 Convert the following state space into a transfer function. (Marks 5) x = 11 * = x + ( u 21 y = [02]x + [2]u Evaluate the steady-state error of state-space system. (Marks 5) i [ 10] [21. *= 15 2]* +11 y = [ 02]x + [2]u Evaluate the steady-state error of state-space system. (Marks 5) -1 0x+lu x =...
 could you please answer this question
QUESTION 2 Consider a system with an open-loop trans fer function given by Y(s) s+7 U(s) s2 +3s-8 (a) (8 marks) Derive a state-space model for the system in canonical form. (b) (4 marks) Check the observability of the system. (c) 8 marks) Design a suitable full-order state observer for the system. Explain your choice of the observer's poles. d) (10 marks) Design a PI controller for the system so the output of the...
could you please answer this question
QUESTION 2 Consider a system with an open-loop trans fer function given by Y(s) s+7 U(s) s2 +3s-8 (a) (8 marks) Derive a state-space model for the system in canonical form. (b) (4 marks) Check the observability of the system. (c) 8 marks) Design a suitable full-order state observer for the system. Explain your choice of the observer's poles. d) (10 marks) Design a PI controller for the system so the output of the...
 Consider a single input, single output system with transfer function 10 H(s)- s+10s +25s +100 Obtain a state-space model in observer canonical form for the system, and design a full state estimator for desired eigenvalues of -10.-20 and-30. What are the values of the estimator gain matrix?
Consider a single input, single output system with transfer function 10 H(s)- s+10s +25s +100 Obtain a state-space model in observer canonical form for the system, and design a full state estimator for...
Consider a single input, single output system with transfer function 10 H(s)- s+10s +25s +100 Obtain a state-space model in observer canonical form for the system, and design a full state estimator for desired eigenvalues of -10.-20 and-30. What are the values of the estimator gain matrix?
Consider a single input, single output system with transfer function 10 H(s)- s+10s +25s +100 Obtain a state-space model in observer canonical form for the system, and design a full state estimator for...
 a-represent system in state space form?
b-find output response y(t?
c-design a state feedback gain controller?
3- A dynamic system is described by the following set of coupled linear ordinary differential equations: x1 + 2x1-4x2-5u x1-x2 + 4x1 + x2 = 5u EDQMS 2/3 Page 1 of 2 a. Represent the system in state-space form. b. For u(t) =1 and initial condition state vector x(0) = LII find the outp (10 marks) response y(t). c. Design a state feedback gain...
a-represent system in state space form?
b-find output response y(t?
c-design a state feedback gain controller?
3- A dynamic system is described by the following set of coupled linear ordinary differential equations: x1 + 2x1-4x2-5u x1-x2 + 4x1 + x2 = 5u EDQMS 2/3 Page 1 of 2 a. Represent the system in state-space form. b. For u(t) =1 and initial condition state vector x(0) = LII find the outp (10 marks) response y(t). c. Design a state feedback gain...
 15% - 3 – A system has a state variable representation as below face) = (4) (0) + (C) u(e) y(t) = (1 0)x(t) It is desired that the canonical diagonal form of the system to be fact) = (94) z(t) + (7) u(t) y(t) = (-5 5)2(t) Determine the parameters a, b and d to yield the required diagonal matrix.
15% - 3 – A system has a state variable representation as below face) = (4) (0) + (C) u(e) y(t) = (1 0)x(t) It is desired that the canonical diagonal form of the system to be fact) = (94) z(t) + (7) u(t) y(t) = (-5 5)2(t) Determine the parameters a, b and d to yield the required diagonal matrix.
 in the figure, obtain the state-space representation of the syster thè 1. Consider the mechanical system shown ssume y() is the output. (25 marks) ce representation of systel. ki lu k2
in the figure, obtain the state-space representation of the syster thè 1. Consider the mechanical system shown ssume y() is the output. (25 marks) ce representation of systel. ki lu k2
 Can someone please explain how to solve the problem below?
6. State Space Systems: a. (5 pts) Determine the state space system in controllable canonical form that implements the transfer function Y(s)_ 252 +5 U(s) s+4s+7s +12 b. (10 pts) For the state space system given below, design a controller u =-Kx+v such that the eigenvalues of the closed loop system are -10, – 20. To 17 , y = Cx C = [25] x = Ax+Bu with A= ln...
Can someone please explain how to solve the problem below?
6. State Space Systems: a. (5 pts) Determine the state space system in controllable canonical form that implements the transfer function Y(s)_ 252 +5 U(s) s+4s+7s +12 b. (10 pts) For the state space system given below, design a controller u =-Kx+v such that the eigenvalues of the closed loop system are -10, – 20. To 17 , y = Cx C = [25] x = Ax+Bu with A= ln...
 A state space representation of a system is below, 1 1 TO La 1 b] + (0.5 y=[0 c]a 9.$+ Given that a = -14, b = -2, and c=6, what is its transfer function ? U(s) in the form of 1 com s+p, stro Please derive your expression and then match its coefficients to the given form carefully and then fill in the blanks below.
A state space representation of a system is below, 1 1 TO La 1 b] + (0.5 y=[0 c]a 9.$+ Given that a = -14, b = -2, and c=6, what is its transfer function ? U(s) in the form of 1 com s+p, stro Please derive your expression and then match its coefficients to the given form carefully and then fill in the blanks below.
 Please only solve part C
Assume the following state space representation of a discrete-time servomotor system. (As a review for the Final Exam, you might check this state space representation with the difference equation in Problem 1 on Homework 2. This parenthetical comment is not a required part for Homework 8.) 2. 0.048371 u(n) 1.9048x(n) lo.04679 [1,0]x(n) y(n) Compute the open-loop eigenvalues of the system. That is, find the eigenvalues of Ф. Check controllability of the system. Or, answer the...
Please only solve part C
Assume the following state space representation of a discrete-time servomotor system. (As a review for the Final Exam, you might check this state space representation with the difference equation in Problem 1 on Homework 2. This parenthetical comment is not a required part for Homework 8.) 2. 0.048371 u(n) 1.9048x(n) lo.04679 [1,0]x(n) y(n) Compute the open-loop eigenvalues of the system. That is, find the eigenvalues of Ф. Check controllability of the system. Or, answer the...
Most questions answered within 3 hours.
-
1. Are all good samples random?
2. Magazines often report surveys giving statistics such as “63%...
asked 2 minutes ago -
Buying your in-laws a gift because it’s expected is
due to the ____________ motive of gift-giving....
asked 10 minutes ago -
Discuss the pros and cons of collaborative software such
as SameTime. Does it increase productivity? What...
asked 7 minutes ago -
A large cable company reports the following.
80% of its customers subscribe to its cable TV...
asked 8 minutes ago -
Calculate the expected value, the variance, and the standard
deviation of the given random variable X....
asked 53 minutes ago -
A hospital performs 100 surgeries per week. The probability that
complications after surgery occur is 10%....
asked 1 hour ago -
1 point) Given the significance level α=0.01 find the following:
(a) left-tailed z value z= (b)...
asked 51 minutes ago -
Assuming you are the head of the software development unit at
Cyber.Soft, explain and justify why...
asked 17 minutes ago -
Magnesium and nitrogen react in a combination reaction to
produce magnesium nitride. 3 Mg + N2...
asked 25 minutes ago -
Two electrons are initially at rest separated by a distance of
2nm. At time t=0, they...
asked 23 minutes ago -
A martial artist is practicing breaking 5 boards. He is able to
break aboard with probability...
asked 30 minutes ago -
The rate constant of a first-order reaction is 2.95 × 10−4 s−1
at 350.° C. If...
asked 33 minutes ago