 could you please answer this question
could you please answer this questionHomework Answers

Add Answer to:
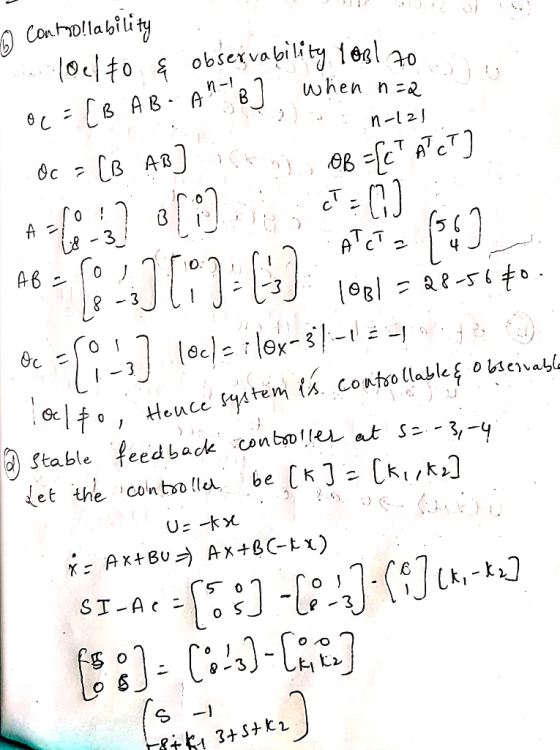
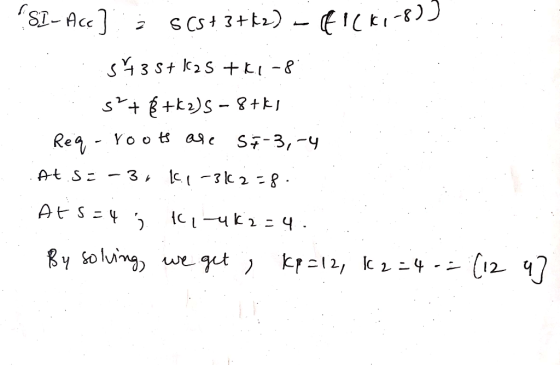
could you please answer this question QUESTION 2 Consider a system with an open-loop trans fer function given by Y(s) s+7 U(s) s2 +3s-8 (a) (8 marks) Derive a state-space model for the system in...
- 4. Full State Feedback and Observer Design Consider the plant s + 1 G(s)- (s + a(s +8(s +10) where a-1. a) Find a...
 - 4. Full State Feedback and Observer Design Consider the plant s + 1 G(s)- (s + a(s +8(s +10) where a-1. a) Find a convenient state space representation of model G(s) . b) Using place design a controller for the system that puts the poles at -1 and-2 +-2 . c) Using place design an observer with poles at-10,-11 and-12 d) Simulate the states with the state estimates overlaid e)Find a state space representation of the closed loop system...
- 4. Full State Feedback and Observer Design Consider the plant s + 1 G(s)- (s + a(s +8(s +10) where a-1. a) Find a convenient state space representation of model G(s) . b) Using place design a controller for the system that puts the poles at -1 and-2 +-2 . c) Using place design an observer with poles at-10,-11 and-12 d) Simulate the states with the state estimates overlaid e)Find a state space representation of the closed loop system...
show steps please 10 A second-order open-loop system with transfer function G(s) = is to be...
 show steps please
10 A second-order open-loop system with transfer function G(s) = is to be $2+45+10 controlled with unity negative feedback. (a) Derive the error transfer functions E(s) of the closed-loop system subjected to a unit step input, when using a P controller and a PI controller, respectively, in terms P control gain kp, and PI control gains kp and ki, respectively. [7] (b) Determine the steady-state errors in (a). Briefly comment on the differences in control performance by...
show steps please
10 A second-order open-loop system with transfer function G(s) = is to be $2+45+10 controlled with unity negative feedback. (a) Derive the error transfer functions E(s) of the closed-loop system subjected to a unit step input, when using a P controller and a PI controller, respectively, in terms P control gain kp, and PI control gains kp and ki, respectively. [7] (b) Determine the steady-state errors in (a). Briefly comment on the differences in control performance by...
5.4 Consider the system with a required steady-state error of 20%, K(s + 2) s(s +3s + 5) and an a...
 5.4 Consider the system with a required steady-state error of 20%, K(s + 2) s(s +3s + 5) and an adjustable PI controller zero location. KL(s) Show that the corresponding closed-loop characteristic equation is given by s+ a Next, rewrite the equation as 1 + KG(s0 where K K K.a is constant, and Gf(s) is a function of s, and ex amine the effect of shifting the zero on the closed-loop poles. (a) Design the system for a dominant second-order...
5.4 Consider the system with a required steady-state error of 20%, K(s + 2) s(s +3s + 5) and an adjustable PI controller zero location. KL(s) Show that the corresponding closed-loop characteristic equation is given by s+ a Next, rewrite the equation as 1 + KG(s0 where K K K.a is constant, and Gf(s) is a function of s, and ex amine the effect of shifting the zero on the closed-loop poles. (a) Design the system for a dominant second-order...
Example: Consider the system Y(s) =G(s) =s2 d'y dt y-u()U(s) and determine the feedback gain...
 Example: Consider the system Y(s) =G(s) =s2 d'y dt y-u()U(s) and determine the feedback gain to place the closed-loop poles at s--1ti. Therefore, we require that α2-2. With xrV and x-dy/dt, the matrix equation for the system and αι G(s) is dy d2y 2dt2 Dorf and Bishop, Modern Control System Problem: Given the plant G(s)-20(s+5)/s(s+1)(s+4) design a state-feedback controller to yield 9.5% overshoot and a settling time of 0.74 sec. Solution: 1) Determine phase-variable state-space representation:
Example: Consider the system Y(s) =G(s) =s2 d'y dt y-u()U(s) and determine the feedback gain to place the closed-loop poles at s--1ti. Therefore, we require that α2-2. With xrV and x-dy/dt, the matrix equation for the system and αι G(s) is dy d2y 2dt2 Dorf and Bishop, Modern Control System Problem: Given the plant G(s)-20(s+5)/s(s+1)(s+4) design a state-feedback controller to yield 9.5% overshoot and a settling time of 0.74 sec. Solution: 1) Determine phase-variable state-space representation:
Question 6 The open-loop transfer function G(s) of a control system is given as G(8)- s(s+2)(s +5...
 Question 6 The open-loop transfer function G(s) of a control system is given as G(8)- s(s+2)(s +5) A proportional controller is used to control the system as shown in Figure 6 below: Y(s) R(s) + G(s) Figure 6: A control system with a proportional controller a) Assume Hp(s) is a proportional controller with the transfer function H,(s) kp. Determine, using the Routh-Hurwitz Stability Criterion, the value of kp for which the closed-loop system in Figure 6 is marginally stable. (6...
Question 6 The open-loop transfer function G(s) of a control system is given as G(8)- s(s+2)(s +5) A proportional controller is used to control the system as shown in Figure 6 below: Y(s) R(s) + G(s) Figure 6: A control system with a proportional controller a) Assume Hp(s) is a proportional controller with the transfer function H,(s) kp. Determine, using the Routh-Hurwitz Stability Criterion, the value of kp for which the closed-loop system in Figure 6 is marginally stable. (6...
Consider the automobile cruise-control system shown below: Engine ActuatorCarburetor 0.833 and load 40 3s +1 Compensator R(s)E(s) Ge(s) s +1 -t e(t) Sensor 0.03 1) Derive the closed-loop transfer fun...
 Consider the automobile cruise-control system shown below: Engine ActuatorCarburetor 0.833 and load 40 3s +1 Compensator R(s)E(s) Ge(s) s +1 -t e(t) Sensor 0.03 1) Derive the closed-loop transfer function of V(s)/R(s) when Gc(s)-1 2) Derive the closed-loop transfer function of E(s)/R(s) when Ge(s)-1 3) Plot the time history of the error e(t) of the closed-loop system when r(t) is a unit step input. 4) Plot the root-loci of the uncompensated system (when Gc(s)-1). Mark the closed-loop complex poles on...
Consider the automobile cruise-control system shown below: Engine ActuatorCarburetor 0.833 and load 40 3s +1 Compensator R(s)E(s) Ge(s) s +1 -t e(t) Sensor 0.03 1) Derive the closed-loop transfer function of V(s)/R(s) when Gc(s)-1 2) Derive the closed-loop transfer function of E(s)/R(s) when Ge(s)-1 3) Plot the time history of the error e(t) of the closed-loop system when r(t) is a unit step input. 4) Plot the root-loci of the uncompensated system (when Gc(s)-1). Mark the closed-loop complex poles on...
y(s) 2 u(s) s1 -. Consider the open-loop unstable system G(s) integral controller to regulate the output y to a constant reference r. The desired closed-loop transfer function is G) +16s +100 Design...
 y(s) 2 u(s) s1 -. Consider the open-loop unstable system G(s) integral controller to regulate the output y to a constant reference r. The desired closed-loop transfer function is G) +16s +100 Design the simplest output feedback (20 pts)
y(s) 2 u(s) s1 -. Consider the open-loop unstable system G(s) integral controller to regulate the output y to a constant reference r. The desired closed-loop transfer function is G) +16s +100 Design the simplest output feedback (20 pts)
y(s) 2 u(s) s1 -. Consider the open-loop unstable system G(s) integral controller to regulate the output y to a constant reference r. The desired closed-loop transfer function is G) +16s +100 Design the simplest output feedback (20 pts)
y(s) 2 u(s) s1 -. Consider the open-loop unstable system G(s) integral controller to regulate the output y to a constant reference r. The desired closed-loop transfer function is G) +16s +100 Design the simplest output feedback (20 pts)
[7] Sketch the root locus for the unity feedback system whose open loop transfer function is K G(s) Draw the root lo...
 [7] Sketch the root locus for the unity feedback system whose open loop transfer function is K G(s) Draw the root locus of the system with the gain Kas a variable. s(s+4) (s2+4s+20) Determine asymptotes, centroid, breakaway point, angle of departure, and the gain at which root locus crosses ja-axis. A control system with type-0 process and a PID controller is shown below. Design the [8 parameters of the PID controller so that the following specifications are satisfied. =100 a)...
[7] Sketch the root locus for the unity feedback system whose open loop transfer function is K G(s) Draw the root locus of the system with the gain Kas a variable. s(s+4) (s2+4s+20) Determine asymptotes, centroid, breakaway point, angle of departure, and the gain at which root locus crosses ja-axis. A control system with type-0 process and a PID controller is shown below. Design the [8 parameters of the PID controller so that the following specifications are satisfied. =100 a)...
Question 2 20 Marks Consider the transfer function, (6-1)(8-2) (82 7s 12)(s +13) G(s) = 1....
 Question 2 20 Marks Consider the transfer function, (6-1)(8-2) (82 7s 12)(s +13) G(s) = 1. Using direct synthesis, synthesize a biproper controller with integral action for this process The desired complementary sensitivity function is given by: (T(s)d- where r is a positive integer to be specified in the design, η1 and η2 are constants to be assigned. 2. What will be the dominant feature of the closed-loop response of the output to a step change in the set-point? Justify...
Question 2 20 Marks Consider the transfer function, (6-1)(8-2) (82 7s 12)(s +13) G(s) = 1. Using direct synthesis, synthesize a biproper controller with integral action for this process The desired complementary sensitivity function is given by: (T(s)d- where r is a positive integer to be specified in the design, η1 and η2 are constants to be assigned. 2. What will be the dominant feature of the closed-loop response of the output to a step change in the set-point? Justify...
Problem 1 Given the transfer function from input u(t) to output y(t), s2-4s +3 Y(s) U(s) (s2 + 6s + 8)(82 + 25) (a) Dev...
 Problem 1 Given the transfer function from input u(t) to output y(t), s2-4s +3 Y(s) U(s) (s2 + 6s + 8)(82 + 25) (a) Develop a state space model for this transfer function, in the standard form y=Cx + Du (b) Suppose that zero input is applied, such that u 0. Perform a modal analysis of the state response for this open-loop system. Your analysis should include the nature of the time response for each mode, as well as how...
Problem 1 Given the transfer function from input u(t) to output y(t), s2-4s +3 Y(s) U(s) (s2 + 6s + 8)(82 + 25) (a) Develop a state space model for this transfer function, in the standard form y=Cx + Du (b) Suppose that zero input is applied, such that u 0. Perform a modal analysis of the state response for this open-loop system. Your analysis should include the nature of the time response for each mode, as well as how...
 - 4. Full State Feedback and Observer Design Consider the plant s + 1 G(s)- (s + a(s +8(s +10) where a-1. a) Find a convenient state space representation of model G(s) . b) Using place design a controller for the system that puts the poles at -1 and-2 +-2 . c) Using place design an observer with poles at-10,-11 and-12 d) Simulate the states with the state estimates overlaid e)Find a state space representation of the closed loop system...
- 4. Full State Feedback and Observer Design Consider the plant s + 1 G(s)- (s + a(s +8(s +10) where a-1. a) Find a convenient state space representation of model G(s) . b) Using place design a controller for the system that puts the poles at -1 and-2 +-2 . c) Using place design an observer with poles at-10,-11 and-12 d) Simulate the states with the state estimates overlaid e)Find a state space representation of the closed loop system...
 show steps please
10 A second-order open-loop system with transfer function G(s) = is to be $2+45+10 controlled with unity negative feedback. (a) Derive the error transfer functions E(s) of the closed-loop system subjected to a unit step input, when using a P controller and a PI controller, respectively, in terms P control gain kp, and PI control gains kp and ki, respectively. [7] (b) Determine the steady-state errors in (a). Briefly comment on the differences in control performance by...
show steps please
10 A second-order open-loop system with transfer function G(s) = is to be $2+45+10 controlled with unity negative feedback. (a) Derive the error transfer functions E(s) of the closed-loop system subjected to a unit step input, when using a P controller and a PI controller, respectively, in terms P control gain kp, and PI control gains kp and ki, respectively. [7] (b) Determine the steady-state errors in (a). Briefly comment on the differences in control performance by...
 5.4 Consider the system with a required steady-state error of 20%, K(s + 2) s(s +3s + 5) and an adjustable PI controller zero location. KL(s) Show that the corresponding closed-loop characteristic equation is given by s+ a Next, rewrite the equation as 1 + KG(s0 where K K K.a is constant, and Gf(s) is a function of s, and ex amine the effect of shifting the zero on the closed-loop poles. (a) Design the system for a dominant second-order...
5.4 Consider the system with a required steady-state error of 20%, K(s + 2) s(s +3s + 5) and an adjustable PI controller zero location. KL(s) Show that the corresponding closed-loop characteristic equation is given by s+ a Next, rewrite the equation as 1 + KG(s0 where K K K.a is constant, and Gf(s) is a function of s, and ex amine the effect of shifting the zero on the closed-loop poles. (a) Design the system for a dominant second-order...
 Example: Consider the system Y(s) =G(s) =s2 d'y dt y-u()U(s) and determine the feedback gain to place the closed-loop poles at s--1ti. Therefore, we require that α2-2. With xrV and x-dy/dt, the matrix equation for the system and αι G(s) is dy d2y 2dt2 Dorf and Bishop, Modern Control System Problem: Given the plant G(s)-20(s+5)/s(s+1)(s+4) design a state-feedback controller to yield 9.5% overshoot and a settling time of 0.74 sec. Solution: 1) Determine phase-variable state-space representation:
Example: Consider the system Y(s) =G(s) =s2 d'y dt y-u()U(s) and determine the feedback gain to place the closed-loop poles at s--1ti. Therefore, we require that α2-2. With xrV and x-dy/dt, the matrix equation for the system and αι G(s) is dy d2y 2dt2 Dorf and Bishop, Modern Control System Problem: Given the plant G(s)-20(s+5)/s(s+1)(s+4) design a state-feedback controller to yield 9.5% overshoot and a settling time of 0.74 sec. Solution: 1) Determine phase-variable state-space representation:
 Question 6 The open-loop transfer function G(s) of a control system is given as G(8)- s(s+2)(s +5) A proportional controller is used to control the system as shown in Figure 6 below: Y(s) R(s) + G(s) Figure 6: A control system with a proportional controller a) Assume Hp(s) is a proportional controller with the transfer function H,(s) kp. Determine, using the Routh-Hurwitz Stability Criterion, the value of kp for which the closed-loop system in Figure 6 is marginally stable. (6...
Question 6 The open-loop transfer function G(s) of a control system is given as G(8)- s(s+2)(s +5) A proportional controller is used to control the system as shown in Figure 6 below: Y(s) R(s) + G(s) Figure 6: A control system with a proportional controller a) Assume Hp(s) is a proportional controller with the transfer function H,(s) kp. Determine, using the Routh-Hurwitz Stability Criterion, the value of kp for which the closed-loop system in Figure 6 is marginally stable. (6...
 Consider the automobile cruise-control system shown below: Engine ActuatorCarburetor 0.833 and load 40 3s +1 Compensator R(s)E(s) Ge(s) s +1 -t e(t) Sensor 0.03 1) Derive the closed-loop transfer function of V(s)/R(s) when Gc(s)-1 2) Derive the closed-loop transfer function of E(s)/R(s) when Ge(s)-1 3) Plot the time history of the error e(t) of the closed-loop system when r(t) is a unit step input. 4) Plot the root-loci of the uncompensated system (when Gc(s)-1). Mark the closed-loop complex poles on...
Consider the automobile cruise-control system shown below: Engine ActuatorCarburetor 0.833 and load 40 3s +1 Compensator R(s)E(s) Ge(s) s +1 -t e(t) Sensor 0.03 1) Derive the closed-loop transfer function of V(s)/R(s) when Gc(s)-1 2) Derive the closed-loop transfer function of E(s)/R(s) when Ge(s)-1 3) Plot the time history of the error e(t) of the closed-loop system when r(t) is a unit step input. 4) Plot the root-loci of the uncompensated system (when Gc(s)-1). Mark the closed-loop complex poles on...
 y(s) 2 u(s) s1 -. Consider the open-loop unstable system G(s) integral controller to regulate the output y to a constant reference r. The desired closed-loop transfer function is G) +16s +100 Design the simplest output feedback (20 pts)
y(s) 2 u(s) s1 -. Consider the open-loop unstable system G(s) integral controller to regulate the output y to a constant reference r. The desired closed-loop transfer function is G) +16s +100 Design the simplest output feedback (20 pts)
y(s) 2 u(s) s1 -. Consider the open-loop unstable system G(s) integral controller to regulate the output y to a constant reference r. The desired closed-loop transfer function is G) +16s +100 Design the simplest output feedback (20 pts)
y(s) 2 u(s) s1 -. Consider the open-loop unstable system G(s) integral controller to regulate the output y to a constant reference r. The desired closed-loop transfer function is G) +16s +100 Design the simplest output feedback (20 pts)
 [7] Sketch the root locus for the unity feedback system whose open loop transfer function is K G(s) Draw the root locus of the system with the gain Kas a variable. s(s+4) (s2+4s+20) Determine asymptotes, centroid, breakaway point, angle of departure, and the gain at which root locus crosses ja-axis. A control system with type-0 process and a PID controller is shown below. Design the [8 parameters of the PID controller so that the following specifications are satisfied. =100 a)...
[7] Sketch the root locus for the unity feedback system whose open loop transfer function is K G(s) Draw the root locus of the system with the gain Kas a variable. s(s+4) (s2+4s+20) Determine asymptotes, centroid, breakaway point, angle of departure, and the gain at which root locus crosses ja-axis. A control system with type-0 process and a PID controller is shown below. Design the [8 parameters of the PID controller so that the following specifications are satisfied. =100 a)...
 Question 2 20 Marks Consider the transfer function, (6-1)(8-2) (82 7s 12)(s +13) G(s) = 1. Using direct synthesis, synthesize a biproper controller with integral action for this process The desired complementary sensitivity function is given by: (T(s)d- where r is a positive integer to be specified in the design, η1 and η2 are constants to be assigned. 2. What will be the dominant feature of the closed-loop response of the output to a step change in the set-point? Justify...
Question 2 20 Marks Consider the transfer function, (6-1)(8-2) (82 7s 12)(s +13) G(s) = 1. Using direct synthesis, synthesize a biproper controller with integral action for this process The desired complementary sensitivity function is given by: (T(s)d- where r is a positive integer to be specified in the design, η1 and η2 are constants to be assigned. 2. What will be the dominant feature of the closed-loop response of the output to a step change in the set-point? Justify...
 Problem 1 Given the transfer function from input u(t) to output y(t), s2-4s +3 Y(s) U(s) (s2 + 6s + 8)(82 + 25) (a) Develop a state space model for this transfer function, in the standard form y=Cx + Du (b) Suppose that zero input is applied, such that u 0. Perform a modal analysis of the state response for this open-loop system. Your analysis should include the nature of the time response for each mode, as well as how...
Problem 1 Given the transfer function from input u(t) to output y(t), s2-4s +3 Y(s) U(s) (s2 + 6s + 8)(82 + 25) (a) Develop a state space model for this transfer function, in the standard form y=Cx + Du (b) Suppose that zero input is applied, such that u 0. Perform a modal analysis of the state response for this open-loop system. Your analysis should include the nature of the time response for each mode, as well as how...
Most questions answered within 3 hours.
-
You and your opponent both roll a fair die. If you both roll the
same number,...
asked 7 minutes ago -
In a study of the accuracy of fast food drive-through orders,
Restaurant A had 257 accurate...
asked 7 minutes ago -
Identify and describe in detail the four categories of
institutions that could be included in a...
asked 13 minutes ago -
In python
class Customer:
def __init__(self, customer_id, last_name, first_name, phone_number, address):
self._customer_id = int(customer_id)
self._last_name =...
asked 20 minutes ago -
What is an example of a limitation in implementing a new
ERP system and how it...
asked 15 minutes ago -
In a section of 9.7cm of an artery with a radius of 2.6mm there
is a...
asked 16 minutes ago -
the two carboxylic acid groups of aspartic acid have different
acidities with pKa values of 2.1...
asked 20 minutes ago -
Would CuCO3 aqueous salt combined with calcium chloride
form a solid precipitate? If so, what would...
asked 19 minutes ago -
How do ECM Solutions assist in embedding a culture of continuous
improvement in an organization? (Project...
asked 39 minutes ago -
Directions
These directions introduce the idea of Essential Questions.
Since this may be a new concept...
asked 42 minutes ago -
1.b. Fiscal policy is said to suffer from ‘crowding out’.
Explain what this means and why...
asked 59 minutes ago -
The equation for the reaction of nitrogen and oxygen to form
nitrogen oxide is written as...
asked 1 hour ago